一、转速控制
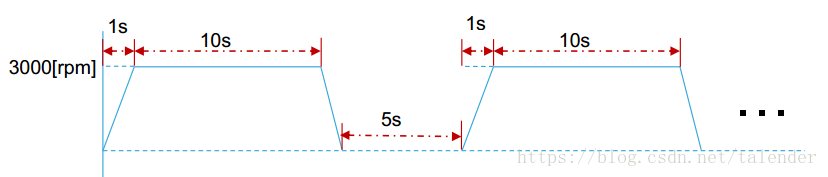
实现如图控制:
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
MC_ProgramSpeedRampMotor1(3000/6,1000); //设定转速为3000
MC_StartMotor1(); //马达运转
HAL_Delay(10000); //延时10S
MC_ProgramSpeedRampMotor1(5000/6,1000); //设定转速为5000
HAL_Delay(10000);
MC_ProgramSpeedRampMotor1(2000/6,1000); //设定转速为2000
HAL_Delay(10000);
MC_StopMotor1(); //马达停转
HAL_Delay(5000); //延时5S
}
/* USER CODE END 3 */通俗易懂,不做过多解释
二、正反转控制

正反转控制会遇到图中的报错问题,应先清除再重新启动,手动workbench的道理相同。
1、添加头文件
如果不添加这三个头文件,在使用State_t等定义的类型时会报错
#include "state_machine.h"
#include "mc_type.h"
#include "mc_tasks.h"2、 电机的状态
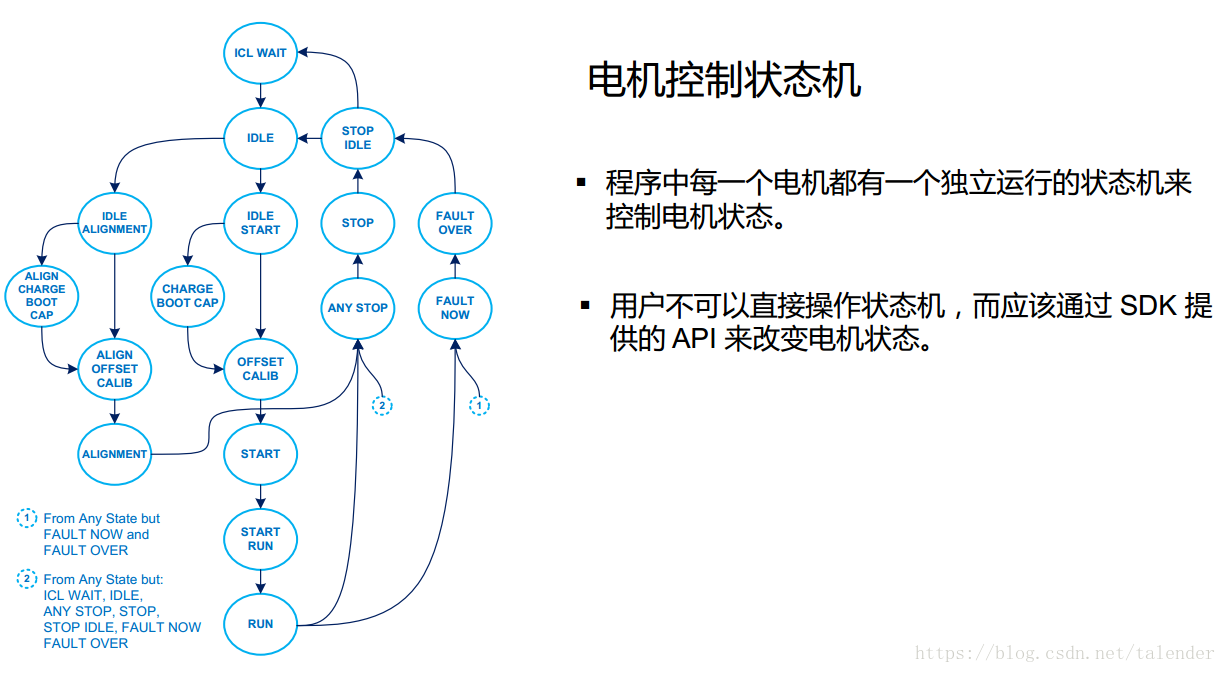
在ST的设定中电机有以上状态,可在单步调试时设置全局变量,调用API观测电机状态
int cr=1;
ste = MCI_GetSTMStateMotor1();API解释如下
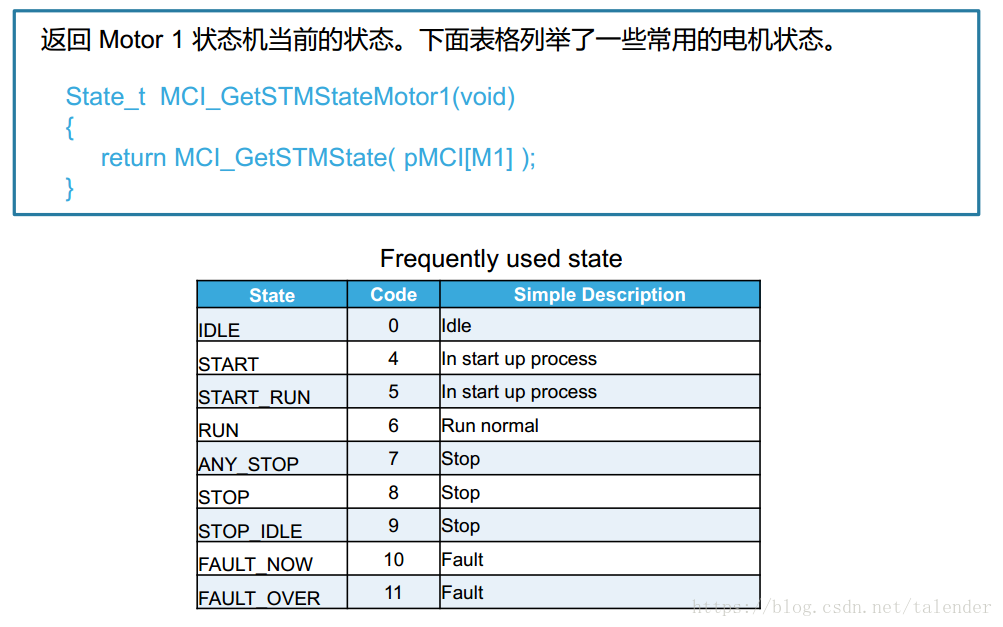
说明:State_t为一枚举类型
typedef enum
{
ICLWAIT = 12, /*!< Persistent state, the system is waiting for ICL
deactivation. Is not possible to run the motor if
ICL is active. Until the ICL is active the state is
forced to ICLWAIT, when ICL become inactive the state
is moved to IDLE */
IDLE = 0, /*!< Persistent state, following state can be IDLE_START
if a start motor command has been given or
IDLE_ALIGNMENT if a start alignment command has been
given */
IDLE_ALIGNMENT = 1, /*!< "Pass-through" state containg the code to be executed
only once after encoder alignment command.
Next states can be ALIGN_CHARGE_BOOT_CAP or
ALIGN_OFFSET_CALIB according the configuration. It
can also be ANY_STOP if a stop motor command has been
given. */
ALIGN_CHARGE_BOOT_CAP = 13,/*!< Persistent state where the gate driver boot
capacitors will be charged. Next states will be
ALIGN_OFFSET_CALIB. It can also be ANY_STOP if a stop
motor command has been given. */
ALIGN_OFFSET_CALIB = 14,/*!< Persistent state where the offset of motor currents
measurements will be calibrated. Next state will be
ALIGN_CLEAR. It can also be ANY_STOP if a stop motor
command has been given. */
ALIGN_CLEAR = 15, /*!< "Pass-through" state in which object is cleared and
set for the startup.
Next state will be ALIGNMENT. It can also be ANY_STOP
if a stop motor command has been given. */
ALIGNMENT = 2, /*!< Persistent state in which the encoder are properly
aligned to set mechanical angle, following state can
only be ANY_STOP */
IDLE_START = 3, /*!< "Pass-through" state containg the code to be executed
only once after start motor command.
Next states can be CHARGE_BOOT_CAP or OFFSET_CALIB
according the configuration. It can also be ANY_STOP
if a stop motor command has been given. */
CHARGE_BOOT_CAP = 16, /*!< Persistent state where the gate driver boot
capacitors will be charged. Next states will be
OFFSET_CALIB. It can also be ANY_STOP if a stop motor
command has been given. */
OFFSET_CALIB = 17, /*!< Persistent state where the offset of motor currents
measurements will be calibrated. Next state will be
CLEAR. It can also be ANY_STOP if a stop motor
command has been given. */
CLEAR = 18, /*!< "Pass-through" state in which object is cleared and
set for the startup.
Next state will be START. It can also be ANY_STOP if
a stop motor command has been given. */
START = 4, /*!< Persistent state where the motor start-up is intended
to be executed. The following state is normally
START_RUN as soon as first validated speed is
detected. Another possible following state is
ANY_STOP if a stop motor command has been executed */
START_RUN = 5, /*!< "Pass-through" state, the code to be executed only
once between START and RUN states it’s intended to be
here executed. Following state is normally RUN but
it can also be ANY_STOP if a stop motor command has
been given */
RUN = 6, /*!< Persistent state with running motor. The following
state is normally ANY_STOP when a stop motor command
has been executed */
ANY_STOP = 7, /*!< "Pass-through" state, the code to be executed only
once between any state and STOP it’s intended to be
here executed. Following state is normally STOP */
STOP = 8, /*!< Persistent state. Following state is normally
STOP_IDLE as soon as conditions for moving state
machine are detected */
STOP_IDLE = 9, /*!< "Pass-through" state, the code to be executed only
once between STOP and IDLE it’s intended to be here
executed. Following state is normally IDLE */
FAULT_NOW = 10, /*!< Persistent state, the state machine can be moved from
any condition directly to this state by
STM_FaultProcessing method. This method also manage
the passage to the only allowed following state that
is FAULT_OVER */
FAULT_OVER = 11 /*!< Persistent state where the application is intended to
stay when the fault conditions disappeared. Following
state is normally STOP_IDLE, state machine is moved as
soon as the user has acknowledged the fault condition.
*/
} State_t; 3、正反转控制
在文档范例上有其他控制方法,以下为自己思考,对电机状态理解有好处
while(1)
{
//======第一圈
if(cr) //cr为while外一整型,用来凑第一圈
{
MC_StartMotor1();
MC_ProgramSpeedRampMotor1(1000/6,1000);
HAL_Delay(10000);
cr=cr-1;
}
//====其他圈
else
{
//MC_StartMotor1();
MC_ProgramSpeedRampMotor1(1000/6,1000);
HAL_Delay(5000); //反转速度后必须延时,留一个报错的时间
ste = MCI_GetSTMStateMotor1();
if(ste==11||ste==10) //如果状态为Fault
{
MC_AcknowledgeFaultMotor1(); //清除报错
MC_StartMotor1();
HAL_Delay(5000); //启动延时,启动是一个过程
int16_t lastspeed=MC_GetLastRampFinalSpeedMotor1();
MC_ProgramSpeedRampMotor1(1000/6, 1000);
MC_StartMotor1();
HAL_Delay(10000);
}
}
//=========反转===========
//MC_StartMotor1();
MC_ProgramSpeedRampMotor1(-1000/6,1000);
HAL_Delay(5000); //反转速度后必须延时,留一个报错的时间
ste = MCI_GetSTMStateMotor1();
if(ste==11||ste==10)
{
MC_AcknowledgeFaultMotor1();
MC_StartMotor1();
HAL_Delay(5000);
int16_t lastspeed=MC_GetLastRampFinalSpeedMotor1();
MC_ProgramSpeedRampMotor1(-1000/6, 1000);
MC_StartMotor1();
HAL_Delay(10000);
}
else
{
HAL_Delay(10000);
}
}
