此系列博客是用来学习Tensorflow和Python的,由于是新手上车,如有错误之处希望大家不吝指出。
整个项目可以从百度云下载:链接:https://pan.baidu.com/s/1f2JPJpE7m5M2kSifMP0-Lw 密码:9p8v
二. SSD网络构建
在网络模型构建环节,主要包含下面三块内容:
- 构建网络的基础部分:VGG_base
- 构建网络的分支部分:SSD的6个预测分支
- SSD的loss设计
SSD的网络结构如下所示,后面的讲解基本就按照该模型来。
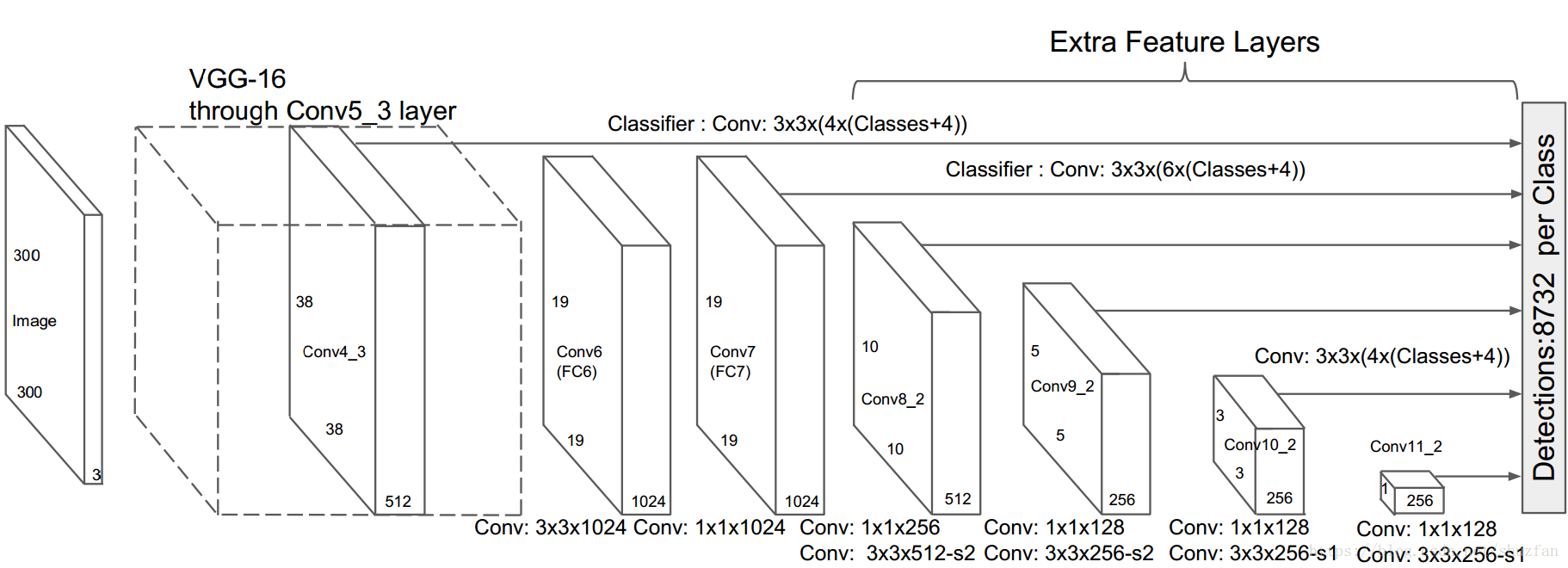
1. VGG_base构建
SSD基础部分采用了VGG16的部分结构:
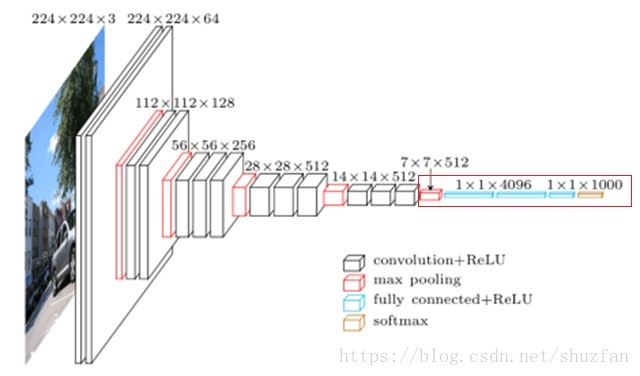
实现的主要区别有:
- (1)舍弃上图红框中的结构,只保留卷积部分;
- (2)本博客实现的是SSD-300,而原来的VGG16的输入是224x224;
- (3)此外,尽量使用pre-trained的VGG16模型来初始话我们的VGG-base;
具体实现如下:
# coding=utf-8
""" vgg_base.py:
To build the basic VGG16 part of the SSD net.
The input shape is n*300*300*3
"""
import tensorflow as tf
VGG_MEAN = [103.939, 116.779, 123.68]
def vgg_net(images):
with tf.name_scope('VGG_base'):
# zero-mean input
mean = tf.constant([123.68, 116.779, 103.939], dtype=tf.float32, shape=[1, 1, 1, 3], name='img_mean')
inputs = images - mean
# build the vgg16 net
# block1, the output is 150*150*64
conv1_1 = conv_layer(inputs, 64, 'conv1_1')
conv1_2 = conv_layer(conv1_1, 64, 'conv1_2')
pool1 = max_pooling_layer(conv1_2, 'pool1')
# block2, the output is 75*75*128
conv2_1 = conv_layer(pool1, 128, 'conv2_1')
conv2_2 = conv_layer(conv2_1, 128, 'conv2_2')
pool2 = max_pooling_layer(conv2_2, 'pool2')
# block3, the output is 38*38*256
conv3_1 = conv_layer(pool2, 256, 'conv3_1')
conv3_2 = conv_layer(conv3_1, 256, 'conv3_2')
conv3_3 = conv_layer(conv3_2, 256, 'conv3_3')
pool3 = max_pooling_layer(conv3_3, 'pool3')
# block4, the output is 19*19*512
conv4_1 = conv_layer(pool3,512, 'conv4_1')
conv4_2 = conv_layer(conv4_1, 512, 'conv4_2')
conv4_3 = conv_layer(conv4_2, 512, 'conv4_3')
pool4 = max_pooling_layer(conv4_3, 'pool4')
# block5,no pooling, the output is 19*19*512
conv5_1 = conv_layer(pool4, 512, 'conv5_1')
conv5_2 = conv_layer(conv5_1, 512, 'conv5_2')
conv5_3 = conv_layer(conv5_2, 512, 'conv5_3')
return conv4_3, conv5_3
# convolution layer, the default kernel size is 3, the default stride is 1
def conv_layer(inputs, num_output, name=None):
# get the number of channels of the inputs
num_input = inputs.get_shape()[-1].value
with tf.name_scope(name):
weights = tf.get_variable(name + '_w',
shape=[3, 3, num_input, num_output],
dtype=tf.float32,
initializer=tf.glorot_normal_initializer())
conv = tf.nn.conv2d(inputs, weights, [1, 1, 1, 1], padding='SAME')
bias = tf.get_variable(name + '_b',
shape=[num_output],
dtype=tf.float32,
initializer=tf.constant_initializer(0))
conv_b = tf.nn.bias_add(conv, bias)
conv_b = tf.nn.relu(conv_b)
return conv_b
# max-pooling layer, the default kernel size is 2, the default stride is 2
def max_pooling_layer(inputs, name):
return tf.nn.max_pool(inputs, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='SAME', name=name)
另外,在util.py中实现了VGG_base使用pre-trained模型的方法:
(该模型参数存放于net文件夹下的vgg_base.npz文件中)
# util.py
# coding=utf-8
import numpy as np
import tensorflow as tf
# initiate the parameters of vgg_net from a pre-trained model
def load_vgg_weights(sess, vgg_model_path=None):
if vgg_model_path is None:
print('Init VGG16 base model with random variables.')
else:
weights = np.load(vgg_model_path)
keys = sorted(weights.keys())
with tf.variable_scope('', reuse=True):
for key in keys:
sess.run(tf.get_variable(key).assign(weights[key]))
print('Init VGG16 base model from pre-trained weights.')
2. SSD的6个分支
SSD的6个分支部分其结构如下图所示:
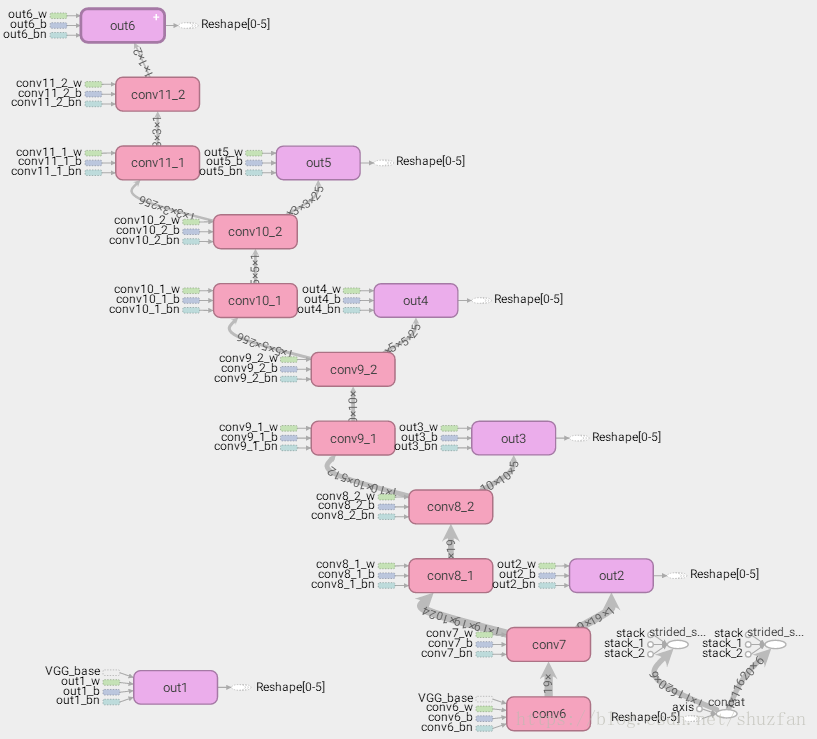
实现时的注意事项主要有:
- (1)为了加快训练,在卷积层后引入了Batch Normalization。关于BN的实现可参照https://blog.csdn.net/shuzfan/article/details/79054561;
- (2)由于最后一个卷积层用于做分类和bounding box回归,因此该卷积层后不再使用ReLU激活函数;
- (3)该部分网络结构基本与论文保持一致。注意conv10和conv11卷积时的边缘补齐方式;
- (4)关于预测层的anchor的数量与论文原文略有不同,这一细节会在后续的第三章介绍;
最终该部分实现如下:
# coding=utf-8
# build the complete SSD net based on VGG16
import tensorflow as tf
from net.vgg_base import vgg_net
from data.constants import *
def ssd(images, is_training):
# stop gradient to images
images = tf.stop_gradient(images)
# build the vgg16
vgg16_conv4_3, vgg16_conv5_3 = vgg_net(images)
# build the extension part of SSD net
with tf.name_scope('ssd_ext'):
# block6 the output is 19*19*1024
conv6 = conv_bn_layer('conv6', vgg16_conv5_3, is_training, 1024, 3, 1)
# block7 the output is 19*19*1024
conv7 = conv_bn_layer('conv7', conv6, is_training, 1024, 1, 1)
# block8 the output is 为10*10*512
conv8_1 = conv_bn_layer('conv8_1', conv7, is_training, 256, 1, 1)
conv8_2 = conv_bn_layer('conv8_2', conv8_1, is_training, 512, 3, 2)
# block9 the output is 5*5*256
conv9_1 = conv_bn_layer('conv9_1', conv8_2, is_training, 128, 1, 1)
conv9_2 = conv_bn_layer('conv9_2', conv9_1, is_training, 256, 3, 2)
# block10 then output is 3*3*256
conv10_1 = conv_bn_layer('conv10_1', conv9_2, is_training, 128, 1, 1)
conv10_2 = conv_bn_layer('conv10_2', conv10_1, is_training, 256, 3, 1, m_padding='VALID')
# block11 the output is 1*1*256
conv11_1 = conv_bn_layer('conv11_1', conv10_2, is_training, 128, 1, 1)
conv11_2 = conv_bn_layer('conv11_2', conv11_1, is_training, 256, 3, 1, m_padding='VALID')
# prediction layers
out1 = conv_bn_layer('out1', vgg16_conv4_3, is_training, anchors_num[0]*(2+4), 3, 1, is_act=False)
out2 = conv_bn_layer('out2', conv7, is_training, anchors_num[1]*(2+4), 3, 1, is_act=False)
out3 = conv_bn_layer('out3', conv8_2, is_training, anchors_num[2]*(2+4), 3, 1, is_act=False)
out4 = conv_bn_layer('out4', conv9_2, is_training, anchors_num[3]*(2+4), 3, 1, is_act=False)
out5 = conv_bn_layer('out5', conv10_2, is_training, anchors_num[4]*(2+4), 3, 1, is_act=False)
out6 = conv_bn_layer('out6', conv11_2, is_training, anchors_num[5]*(2+4), 1, 1, is_act=False)
# reshape the outputs
out1 = tf.reshape(out1, [-1, feature_size[0] * feature_size[0] * anchors_num[0], 6])
out2 = tf.reshape(out2, [-1, feature_size[1] * feature_size[1] * anchors_num[1], 6])
out3 = tf.reshape(out3, [-1, feature_size[2] * feature_size[2] * anchors_num[2], 6])
out4 = tf.reshape(out4, [-1, feature_size[3] * feature_size[3] * anchors_num[3], 6])
out5 = tf.reshape(out5, [-1, feature_size[4] * feature_size[4] * anchors_num[4], 6])
out6 = tf.reshape(out6, [-1, feature_size[5] * feature_size[5] * anchors_num[5], 6])
# concat all predictions from six detection branches
outputs = tf.concat([out1, out2, out3, out4, out5, out6], 1)
# slice
cls_predict = outputs[:, :, :2]
reg_predict = outputs[:, :, 2:]
return cls_predict, reg_predict
# the defination of convolution layer
def conv_bn_layer(name, bottom, is_training, num_output,
kernel_size, stride, is_bn=True, is_act=True, m_padding='SAME'):
bottom = tf.convert_to_tensor(bottom)
num_input = bottom.get_shape()[-1].value
with tf.name_scope(name):
weights = tf.get_variable(name+'_w',
shape=[kernel_size, kernel_size, num_input, num_output],
dtype=tf.float32,
initializer=tf.glorot_normal_initializer())
conv = tf.nn.conv2d(bottom, weights, [1, stride, stride, 1], padding=m_padding)
bias = tf.get_variable(name + '_b',
shape=[num_output],
dtype=tf.float32,
initializer=tf.constant_initializer(0))
conv_b = tf.nn.bias_add(conv, bias)
# whether use Batch Normalization
if is_bn is True:
conv_b = bn_layer(conv_b, is_training, name=name+'_bn')
# whether use ReLU activation
if is_act is True:
conv_b = tf.nn.relu(conv_b, name=name+'_relu')
return conv_b
# the defination of batch normalization layer
def bn_layer(x, is_training, name='BatchNorm', moving_decay=0.9, eps=1e-5):
# assert whether fitting a convolutional layer (4) or a fully-connected layer (2)
shape = x.shape
assert len(shape) in [2, 4]
param_shape = shape[-1]
with tf.variable_scope(name):
gamma = tf.get_variable(name+'_gamma', param_shape, initializer=tf.constant_initializer(1))
beta = tf.get_variable(name+'_beat', param_shape, initializer=tf.constant_initializer(0))
# compute present means and variances
axes = list(range(len(shape)-1))
batch_mean, batch_var = tf.nn.moments(x, axes, name='moments')
# update the means and variances by moving average method
ema = tf.train.ExponentialMovingAverage(moving_decay)
def mean_var_with_update():
ema_apply_op = ema.apply([batch_mean, batch_var])
with tf.control_dependencies([ema_apply_op]):
return tf.identity(batch_mean), tf.identity(batch_var)
# when training, update the means and variances; when testing, use the history results
mean, var = tf.cond(tf.equal(is_training, True), mean_var_with_update,
lambda: (ema.average(batch_mean), ema.average(batch_var)))
return tf.nn.batch_normalization(x, mean, var, beta, gamma, eps,name=name)3. SSD的loss设计
SSD原文中的loss函数如下:

该loos主要有以下特点:
(1)回归任务只针对匹配成功的anchor,且使用smooth L1 loss:

具体实现如下:
# compute the smooth_l1 loss
def smooth_l1(x):
# L1
l1 = tf.abs(x) - 0.5
# L2
l2 = 0.5 * (x**2.0)
# find abs(x_i) < 1
condition = tf.less(tf.abs(x), 1.0)
return tf.where(condition, l2, l1)(2)N 表示成功匹配的anchor数量,当N=0时整个loss直接置为0
(3)为保证训练样本的均衡:通过对背景区域anchor的loss进行排序并选中其中最难的一批来保证总的正负样本比例为1:3
大概的实现如下:(注意这个函数,本人没有测试过)
# the loss function of SSD Model
# cls_predict is the prediction tensor for classification whose shape is batch_size*8732*2
# reg_predict is the prediction tensor for regression whose shape is batch_size*8732*4
def ssd_loss(cls_predict, reg_predict, cls_label, reg_label,
negpos_ratio=3, alpha=1.0, scope='ssd_loss'):
with tf.name_scope(scope):
# convert to tensor
cls_label = tf.convert_to_tensor(cls_label, dtype=tf.float32)
reg_label = tf.convert_to_tensor(reg_label, dtype=tf.float32)
mean_cls_loss = tf.zeros([1], dtype=tf.float32)
mean_reg_loss = tf.zeros([1], dtype=tf.float32)
mean_all_loss = tf.zeros([1], dtype=tf.float32)
batch = cls_label.get_shape()[-1].value
# process images iteratively
for i in range(batch):
# find all positive examples and negative examples separately
pos_mask = cls_label[i, :, 1] > 0.5
pos_mask = tf.reshape(pos_mask, [all_anchors_num, 1])
neg_mask = tf.logical_not(pos_mask)
# compute the number of positives
pos_mask = tf.cast(pos_mask, tf.float32)
pos_num = tf.reduce_sum(pos_mask)
# if pos_num is zero
pos_num = tf.where(pos_num > 0, pos_num, 1)
# hard mining, the number of adopted negative examples
neg_num = tf.minimum(pos_num*negpos_ratio, all_anchors_num-pos_num)
# find negative examples with top_k loss
neg_prob = tf.nn.softmax(cls_predict[i, :, :])
neg_prob = tf.reshape(neg_prob[:, 1], [all_anchors_num, 1])
neg_prob = tf.where(neg_mask, neg_prob, tf.zeros(neg_mask.shape, dtype=tf.float32))
val, indexes = tf.nn.top_k(neg_prob, k=tf.cast(neg_num, tf.int32))
neg_mask = neg_prob > val[-1]
neg_mask = tf.cast(neg_mask, tf.float32)
# compute all loss
anchor_cls_loss = tf.nn.softmax_cross_entropy_with_logits_v2(labels=cls_label[i, :, :],
logits=cls_predict[i, :, :])
anchor_reg_loss = smooth_l1(reg_predict[i, :, :] - reg_label[i, :, :])
# weighted loss
cls_loss = tf.losses.compute_weighted_loss(anchor_cls_loss, pos_mask+neg_mask)
cls_loss = tf.reduce_sum(cls_loss) / pos_num
reg_loss = tf.losses.compute_weighted_loss(anchor_reg_loss, pos_mask)
reg_loss = tf.reduce_sum(reg_loss) / pos_num
# add the losses and compute the mean
mean_cls_loss += (cls_loss / batch)
mean_reg_loss += (reg_loss / batch)
mean_all_loss += (cls_loss + alpha*reg_loss) / batch
return mean_cls_loss, mean_reg_loss, mean_all_loss
对于使用KITTI数据集进行车辆检测而言,SSD原始的分类loss有以下缺点:
- (1) KITTI中有些图片没有车辆,此时如果按照原始的SSD分类loss,则会因为N=0而直接将loss置为0,则导致图片无法被利用。
- (2) 通过在线将loss进行排序来选择负样本来保证正负样本比例为1:3的做法比较慢。
因此,个人针对上述问题设计了一个新的loss:
该loss的核心在于在准备图片阶段提前准备好用于分类和回归任务的加权mask,具体地:
(1)举例比如一共有K=10个anchors,其中正样本为N=2个,则负样本为M=8个。我们用于分类的label为[1, 0, 1, 0, 0, 0, 0, 0, 0, 0]。
(2)当N>0时,则正样本分类的加权mask为:pos_mask=[1, 0, 1, 0, 0, 0, 0, 0, 0, 0] / N = [0.5, 0, 0.5, 0, 0, 0, 0, 0, 0, 0]。
(3)当M>0时,且设定正负样本比例为1:3时,则负样本分类的加权mask为:neg_mask={1-[1, 0, 1, 0, 0, 0, 0, 0, 0, 0]} / M * 3 = [0, 0.375, 0, 0.375, 0.375, 0.375, 0.375, 0.375, 0.375, 0.375]。
(4) 然后整个分类任务的加权mask为:cls_mask = pos_mask + neg_mask = [0.5, 0.375, 0.5, 0.375, 0.375, 0.375, 0.375, 0.375, 0.375, 0.375]
(5) 假设回归任务的权重系数为alpha, 则回归任务的加权mask为:reg_mask = pos_mask * alpha
当有了上述的mask时,我们SSD的新loss如下:
# my new loss function of SSD Model
# cls_predict is the prediction tensor for classification whose shape is batch_size*8732*2
# reg_predict is the prediction tensor for regression whose shape is batch_size*8732*4
def ssd_loss_new(cls_predict, reg_predict, cls_label, reg_label,
cls_mask, reg_mask, scope='ssd_loss_new'):
with tf.name_scope(scope):
# stop gradients to labels
cls_label = tf.stop_gradient(cls_label)
reg_label = tf.stop_gradient(reg_label)
cls_mask = tf.stop_gradient(cls_mask)
reg_mask = tf.stop_gradient(reg_mask)
batch = cls_predict.get_shape()[0].value
cls_predict = tf.reshape(cls_predict, [batch * all_anchors_num, 2])
reg_predict = tf.reshape(reg_predict, [batch * all_anchors_num, 4])
# cls_label = tf.reshape(cls_label, [batch*all_anchors_num, 2])
# reg_label = tf.reshape(reg_label, [batch * all_anchors_num, 4])
# compute all loss
cls_loss = tf.nn.softmax_cross_entropy_with_logits(labels=cls_label, logits=cls_predict)
reg_loss = tf.reduce_sum(smooth_l1(reg_predict - reg_label), 1)
# mask
cls_loss = tf.reduce_sum(tf.multiply(cls_loss, cls_mask)) / batch
reg_loss = tf.reduce_sum(tf.multiply(reg_loss, reg_mask)) / batch
return cls_loss, reg_loss, cls_loss + reg_loss