版权声明:本文为博主原创文章,未经博主允许转载。 https://blog.csdn.net/jklinux/article/details/82391923
通过A64手册可以看出共有两个普通gpio控制器:
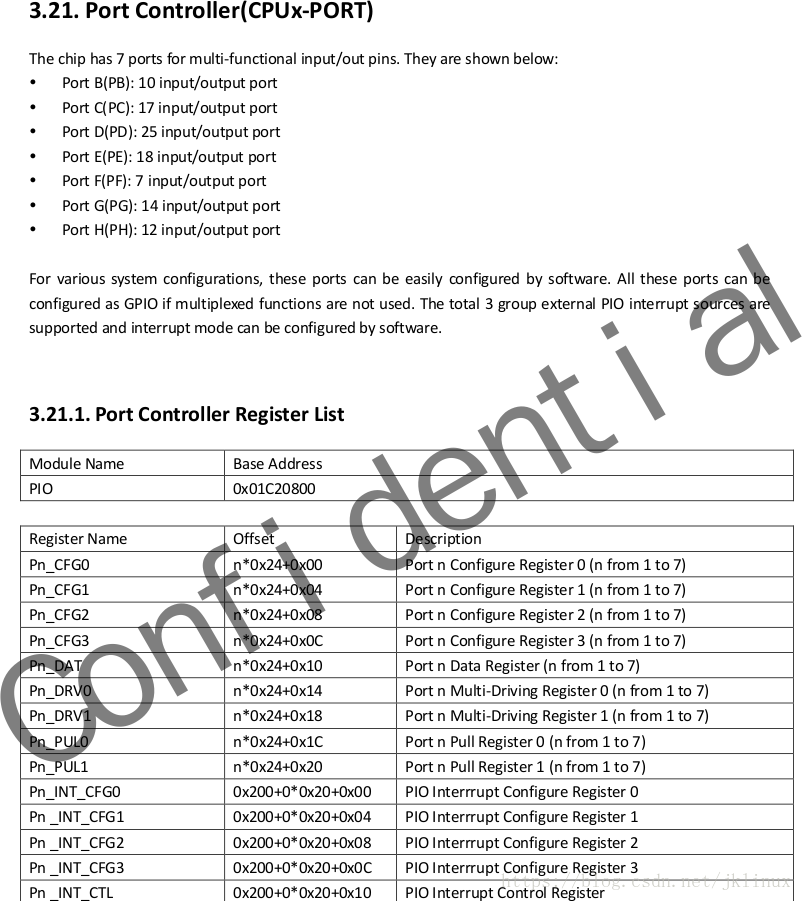
gpio控制器是由厂商负责驱动好的,在设备树里关于gpio控制器的描述:
pio: pinctrl@01c20800 {
compatible = "allwinner,sun50i-pinctrl";
reg = <0x0 0x01c20800 0x0 0x400>;
interrupts = <0 11 4>,
<0 17 4>,
<0 21 4>;
device_type = "pio";
clocks = <&clk_pio>;
gpio-controller;
interrupt-controller;
#interrupt-cells = <2>;
#size-cells = <0>;
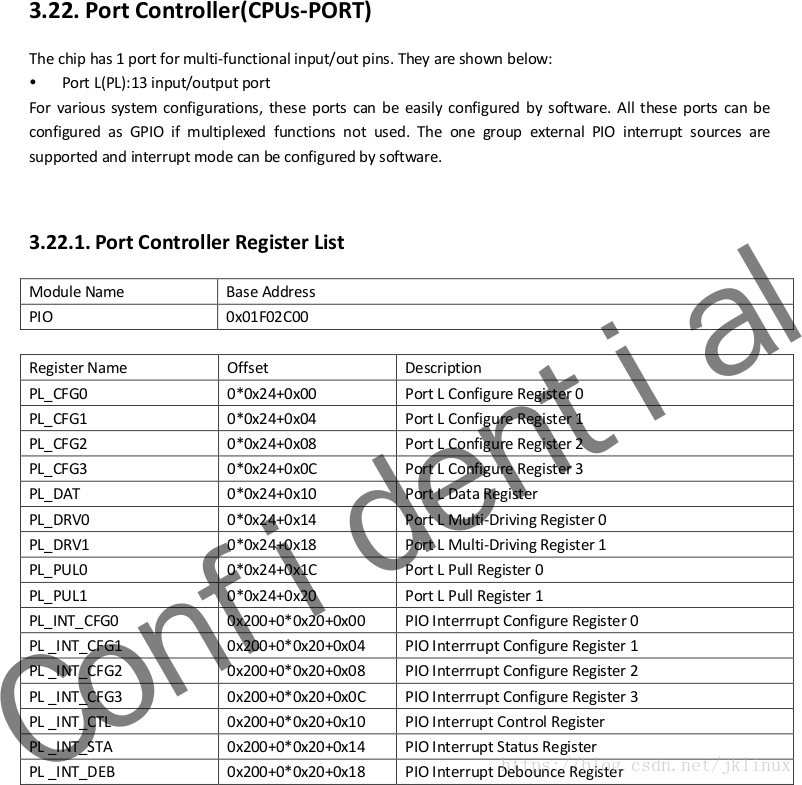
#gpio-cells = <6>; r_pio: pinctrl@01f02c00 {
compatible = "allwinner,sun50i-r-pinctrl";
reg = <0x0 0x01f02c00 0x0 0x400>;
interrupts = <0 45 4>;
clocks = <&clk_cpurpio>;
device_type = "r_pio";
gpio-controller;
interrupt-controller;
#interrupt-cells = <2>;
#size-cells = <0>;
#gpio-cells = <6>;
其中“ #gpio-cells = <6>”表示在设备树里描述使用一个gpio口需要提供6个指定的参数.
通过文档,可以得知6个参数的分别作用:
gpio = <&pio 1 1 1 1 1 0>;
| | | | | | | |-------------------表示有效电平
| | | | | | |----------------------上下拉, 0关闭功能, 1上拉, 2下拉, 3保留
| | | | | |-------------------------驱动力,电流等级(0 - 3),级别越高,输出电流越大
| | | | |----------------------------gpio功能类型,0输入, 1输出, 6和外部中断,7关闭功能(具体查手册)
| | | |------------------------------pin bank 内偏移(即组内第几个io口).
| | |---------------------------------哪组gpio, PA(0),PB(1),PC(2),PD(3),PE(4),PF(5),PG(6),PH(7),PI(8),PJ(9),PK(10),PL(11)
| |--------------------------------------指向哪个gpio控制器, pio / r_pio(PL组)
|-----------------------------------------------------属性名字(随便命名)获取设备树里设备节点的gpio口信息:
#include <linux/of_gpio.h>
//只需一个函数即可
int of_get_named_gpio_flags(struct device_node *np, const char *propname,
int index, enum of_gpio_flags *flags);
//返回值为int类型的gpio口.
//np为设备或设备子节点对象, propname为指定的属性名字, index表示获取属性里的第几个值
// 其中flags一定得注意,按文档里的说明应就是一个int类型的值,但根本就不能为int参数(会导致kernel panic),
// 通过阅读内核里的代码得出, flags的参数应为struct gpio_config类型. 定义在下面文件:
"include/linux/sys_config.h"
struct gpio_config {
u32 gpio; /* gpio global index, must be unique */
u32 mul_sel; /* multi sel val: 0 - input, 1 - output... */
u32 pull; /* pull val: 0 - pull up/down disable, 1 - pull up... */
u32 drv_level; /* driver level val: 0 - level 0, 1 - level 1... */
u32 data; /* data val: 0 - low, 1 - high, only vaild when mul_sel is input/output */
};获取到int类型的gpio口后,就可以使用linux/gpio.h里的gpio口操作函数:
#include <linux/gpio.h> //里面声明io口的操作函数
int gpio_request(unsigned gpio, const char *label);//每个io只能被请求一次,可防止多个驱动来控制同一个IO口
void gpio_free(unsigned gpio); //释放已请求的io口
int gpio_direction_input(unsigned gpio); //把指定的IO口作输入功能, gpio用于指定具体哪个io口
int gpio_direction_output(unsigned gpio, int value); //作输出功能,并根据value的值输出高低电平
int gpio_get_value(unsigned gpio); //获取指定IO口的电平
void gpio_set_value(unsigned gpio, int value); //设置IO口的电平为value(0/1)
int gpio_to_irq(unsigned gpio); //根据io口,获取到它对应的中断号(io口大都有外部中断功能)应用例子,如图板上有两个led,和一个蜂鸣器:
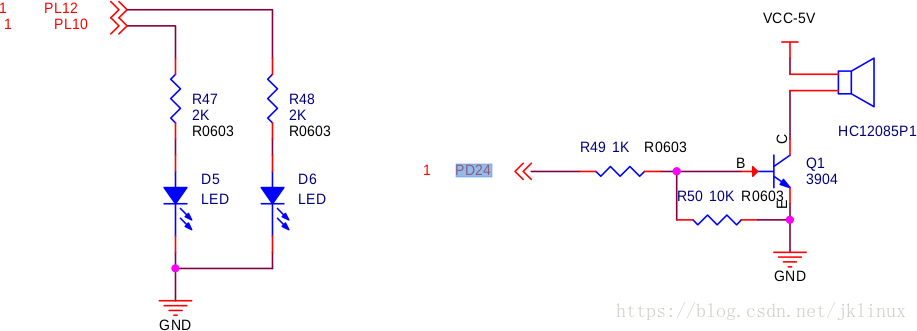
设备树里的描述:
jkbuzzer {
compatible = "jk,buzzer";
gpios = <&pio 3 24 1 1 1 1>;
};
jkleds {
compatible = "jk,leds";
gpios = <&r_pio 11 10 1 1 1 1>, <&r_pio 11 12 1 1 1 1>;
};蜂鸣器的测试代码 :
#include <linux/init.h>
#include <linux/module.h>
#include <linux/platform_device.h>
#include <linux/of.h>
#include <linux/of_gpio.h>
#include <linux/gpio.h>
#include <linux/sys_config.h>
#include <linux/delay.h>
int myprobe(struct platform_device *pdev)
{
struct device_node *nd = pdev->dev.of_node;
int gpio;
struct gpio_config config;
printk("gpio count:%d\n", of_gpio_named_count(nd, "gpios"));
gpio = of_get_named_gpio_flags(nd, "gpios", 0, (enum of_gpio_flags *)&config);
if (!gpio_is_valid(gpio))
printk("gpio isn't valid\n");
if (gpio_request(gpio, pdev->name) < 0)
printk("gpio request failed %d\n", gpio);
gpio_direction_output(gpio, 1);
msleep(3000);
gpio_direction_input(gpio);
gpio_free(gpio);
return 0;
}
int myremove(struct platform_device *pdev)
{
printk("in myremove ...\n");
return 0;
}
struct of_device_id ids[] = {
{.compatible = "jk,buzzer"},
{},
};
struct platform_driver mydrv = {
.probe = myprobe,
.remove = myremove,
.driver = {
.owner = THIS_MODULE,
.name = "mydrv" ,
.of_match_table = ids,
},
};
module_platform_driver(mydrv);
MODULE_LICENSE("GPL");
两个led灯的测试代码:
#include <linux/init.h>
#include <linux/module.h>
#include <linux/platform_device.h>
#include <linux/of.h>
#include <linux/of_gpio.h>
#include <linux/gpio.h>
#include <linux/sys_config.h>
#include <linux/delay.h>
int myprobe(struct platform_device *pdev)
{
struct device_node *nd = pdev->dev.of_node;
int gpio, n, i;
struct gpio_config config;
n = of_gpio_named_count(nd, "gpios");
for (i = 0; i < n ; i++)
{
gpio = of_get_named_gpio_flags(nd, "gpios", i, (enum of_gpio_flags *)&config);
if (!gpio_is_valid(gpio))
printk("gpio isn't valid\n");
if (gpio_request(gpio, pdev->name) < 0)
printk("gpio request failed %d\n", gpio);
gpio_direction_output(gpio, 1);
msleep(3000);
gpio_direction_input(gpio);
gpio_free(gpio);
}
return 0;
}
int myremove(struct platform_device *pdev)
{
printk("in myremove ...\n");
return 0;
}
struct of_device_id ids[] = {
{.compatible = "jk,leds"},
{},
};
struct platform_driver mydrv = {
.probe = myprobe,
.remove = myremove,
.driver = {
.owner = THIS_MODULE,
.name = "mydrv" ,
.of_match_table = ids,
},
};
module_platform_driver(mydrv);
MODULE_LICENSE("GPL");