一、tf.nn.moments函数
def moments(x, axes, name=None, keep_dims=False)
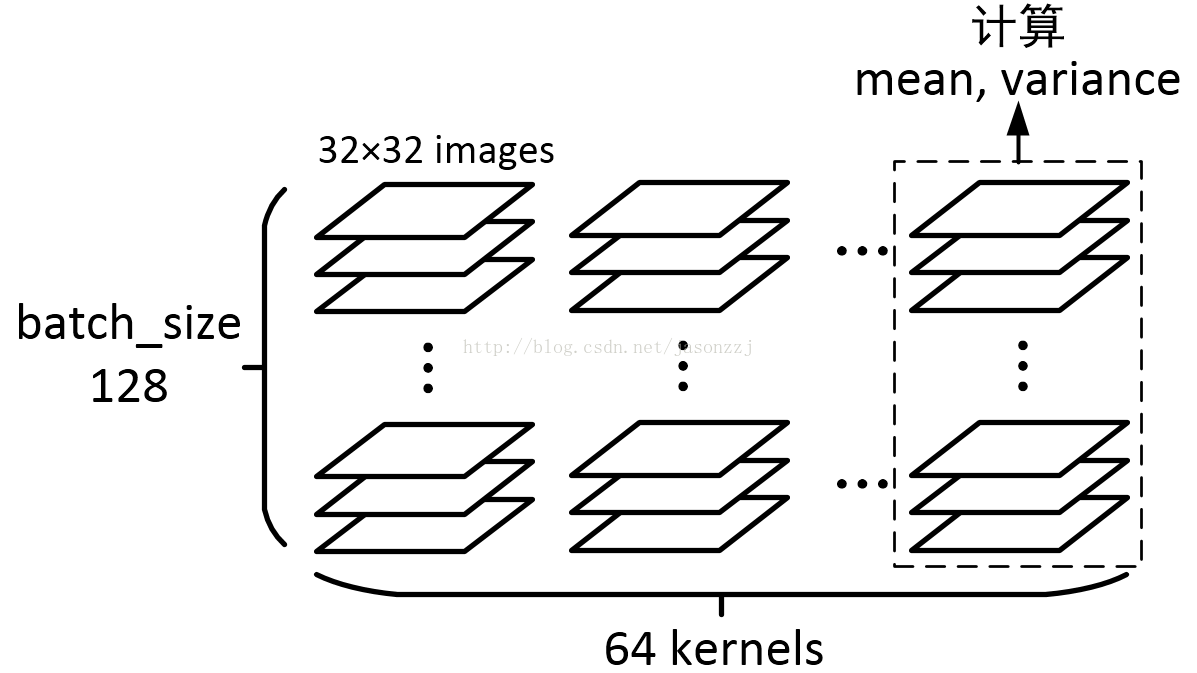
- x 输出的数据,形如 [batchsize, height, width, kernels]
- axes 表示在哪个维度上求解,是个list,例如 [0, 1, 2]
- name 就是个名字,不多解释
- keep_dims 是否保持维度
输出:Two Tensor objects: mean andvariance.
- mean 就是均值
- variance 就是方差
例如:计算2×3维向量的mean和variance
img = tf.Variable(tf.random_normal([2, 3])) axis = list(range(len(img.get_shape()) - 1)) mean, variance = tf.nn.moments(img, axis)可能对于2×3这么大的矩阵,理解起来比较容易,但是对于 [128, 32, 32, 64] 这样的4维矩阵,理解就有点困难了
根据图示可能好理解些:
二、tf.nn.batch_normalization函数
def batch_normalization(x, mean, variance, offset, scale, variance_epsilon, name=None):
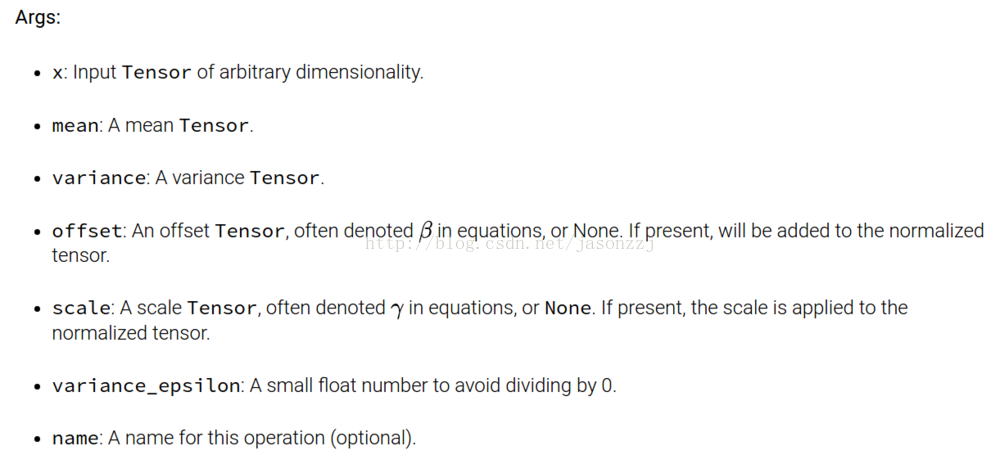
其中Xi对应x,μ即为mean,δ对应variance。第3个公式做初步的Norm,第4个公式中,γ即为scale,β对应offset。offset一般初始化为0,scale初始化为1,另外offset、scale的shape与mean相同,variance_epsilon这个参数设为一个很小的数就行,比如0.001。
BN在实际中,由于mean和variance是和batch内的数据有关的,因此需要注意训练过程和预测过程中,mean和variance无法使用相同的数据。需要一个trick,即moving_average,代码如下:
update_moving_mean = moving_averages.assign_moving_average(moving_mean, mean, BN_DECAY) update_moving_variance = moving_averages.assign_moving_average(moving_variance, variance, BN_DECAY) tf.add_to_collection(UPDATE_OPS_COLLECTION, update_moving_mean) tf.add_to_collection(UPDATE_OPS_COLLECTION, update_moving_variance) mean, variance = control_flow_ops.cond(['is_training'], lambda: (mean, variance), lambda: (moving_mean, moving_variance))
对于assign_moving_average方法如下:
def assign_moving_average(variable, value, decay, zero_debias=True, name=None)
其实内部计算比较简单,公式表达如下:
variable = variable * decay + value * (1 - decay)
变换一下:
variable = variable - (1 - decay) * (variable - value)
减号后面的项就是moving_average的更新delta了。
variable = variable * decay + value * (1 - decay)
变换一下:
variable = variable - (1 - decay) * (variable - value)
减号后面的项就是moving_average的更新delta了。