准备近期在深圳这边找驱动相关的工作了,所以从头开始再学一遍韦东山老师的驱动课程,并做好记录,希望能找到满意的工作。
同时该系列的驱动都是在前面新移植的linux3.16.57的基础上工作的。
之前的驱动模型学习和分析,从框架上了解的驱动的组织形式。
https://blog.csdn.net/qq_16777851/article/category/7901554
在ARM工作模式中,处理器模式切换可以通过软件控制进行切换,即修改CPSR模式位,但这是在特权模式下,当我们处于用户模式下,是没有权限实现模式转换的。若想实现模式切换,只能由另一种方法来实现,即通过中断或是异常处理过程进行切换。于是ARM指令集中提供了两条产生异常的指令,通过这两条指令可以用软件的方法实现异常,其中一个就是中断指令swi(另一个是断点中断BKPT ).
软件中断指令(Software Interrupt, swi)用于产生软中断,实现从用户模式变换到管理模式,CPSR保存到管理模式的SPSR中,执行转移到swi向量。在其他模式下也可以使用SWI指令,处理器同样切换到管理模式。
1.SWI指令格式如下:
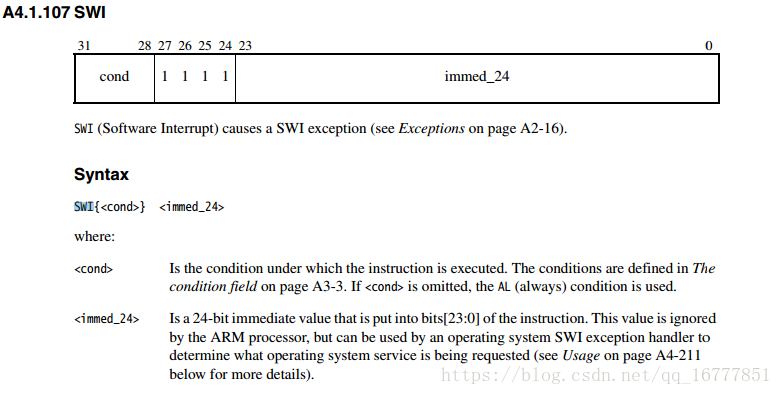
cond 是执行指令的条件
immed_24 24位立即数,值为从0――16777215之间的整数
SWI指令后面的24立即数是干什么用的呢?用户程序通过SWI指令切换到特权模式,进入软中断处理程序,但是软中断处理程序不知道用户程序到底想要做什么?SWI指令后面的24位用来做用户程序和软中断处理程序之间的接头暗号。通过该软中断立即数来区分用户不同操作,执行不同内核函数。如果用户程序调用系统调用时传递参数,根据ATPCSC语言与汇编混合编程规则将参数放入R0~R4即可。
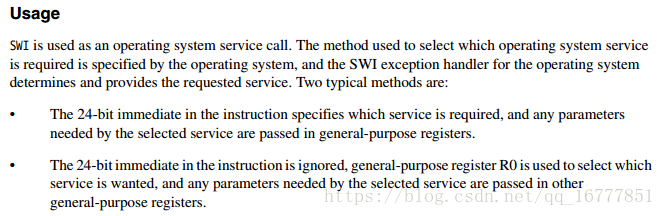
使用SWI指令时,通常使用以下两种方法进行参数传递,SWI异常处理程序可以提供相关的服务,这两种方法均是用户软件协定。SWI异常中断处理程序要通过读取引起软件中断的SWI指令,以取得24为立即数。
1)、指令中24位的立即数指定了用户请求的服务类型,中断服务的参数通过通用寄存器传递。
如下面这个程序产生一个中断号位12 的软中断:
MOV R0,#34 ;设置功能号为34
SWI 12 ;产生软中断,中断号为122)、指令中的24位立即数被忽略,用户请求的服务类型有寄存器R0的值决定,参数通过其他的通用寄存器传递。
如下面的例子通过R0传递中断号,R1传递中断的子功能号:
MOV R0, #12 ;设置12号软中断
MOV R1, #34 ;设置功能号为34
SWI 0操作系统的主要功能是为应用程序的运行创建良好的环境,保障每个程序都可以最大化利用硬件资源,防止非法程序破坏其它应用程序执行环境,为了达到这个目的,操作系统会将硬件的操作权限交给内核程序来管理,用户程序不能随意使用硬件,使用硬件(对硬件寄存器进行读写)时要先向操作系统发出请求,操作系统内核帮助用户程序实现其操作,也就是说用户程序不会直接操作硬件,而是提供给用户程序一些具备预定功能的内核函数,通过一组称为系统调用的(system call)的接口呈现给用户,系统调用把应用程序的请求传给内核,调用相应的内核函数完成所需的处理,将处理结果返回给应用程序。
操作系统里将用户程序运行在用户模式下,并且为其分配可以使用内存空间,其它内存空间不能访问,内核态运行在特权模式下,对系统所有硬件进行统一管理和控制。从前面所学知识可以了解到,用户模式下没有权限进行模式切换,这也就意味着用户程序不可能直接通过切换模式去访问硬件寄存器,如果用户程序试图访问没有权限的硬件,会产生异常。这样用户程序被限制起来,如果用户程序想要使用硬件时怎么办呢?用户程序使用硬件时,必须调用操作系统提供的API接口才可以,而操作系统API接口通过软件中断方式切换到管理模式下,实现从用户模式下进入特权模式。
在3.16.57的内核中总共有382个系统调用
arch/arm/kernel/colls.S/* 0 */ CALL(sys_restart_syscall)
CALL(sys_exit)
CALL(sys_fork)
CALL(sys_read)
CALL(sys_write)
/* 5 */ CALL(sys_open)
CALL(sys_close)
CALL(sys_ni_syscall) /* was sys_waitpid */
CALL(sys_creat)
CALL(sys_link)
......
/* 375 */ CALL(sys_setns)
CALL(sys_process_vm_readv)
CALL(sys_process_vm_writev)
CALL(sys_kcmp)
CALL(sys_finit_module)
/* 380 */ CALL(sys_sched_setattr)
CALL(sys_sched_getattr)
CALL(sys_renameat2)其中CALL的定义如下,可以看出是直接定义为代码段的某个地址了,方便数组下标索引,可以看到sys_open的偏移是5
#define CALL(x) .long xEABI (Extended ABI)
CONFIG_OABI_COMPAT //表示老的系统调用接口
CONFIG_AEABI //新的系统调用接口EABI ,说的是这样的一种新的系统调用方式
mov r7, #num
swi 0x0
原来的系统调用方式是这样,
swi (#num | 0x900000) (0x900000是个magic值)
也就是说原来的调用方式(Old ABI)是通过跟随在swi指令中的调用号来进行的,现在的是根据r7中的值。
现在看两个宏,一个是
CONFIG_OABI_COMPAT 意思是说和old ABI兼容
另一个是
CONFIG_AEABI 意思是说指定现在的方式为EABI
这两个宏可以同时配置,也可以都不配,也可以配置任何一种。
我说一下内核是怎么处理这一问题的。
我们知道,sys_call_table 在内核中是个跳转表,这个表中存储的是一系列的函数指针,这些指针就是系统调用函数的指针,如(sys_open).系统调用是根据一个调用号(通常就是表的索引)找到实际该调用内核哪个函数,然后运行该函数完成的。
首先,对于old ABI,内核给出的处理是给它建立一个单独的system calltable,叫sys_oabi_call_table,这样,兼容方式下就会有两个system call table, 以oldABI方式的系统调用会执行old_syscall_table表中的系统调用函数,EABI方式的系统调用会用sys_call_table中的函数指针。
配置无外乎以下4中
第一 两个宏都配置 行为就是上面说的那样
第二 只配置CONFIG_OABI_COMPAT , 那么以old ABI方式调用的会用sys_oabi_call_table,以EABI方式调用的 用sys_call_table,和1实质相同,只是情况1更加明确。
第三 只配置CONFIG_AEABI 系统中不存在 sys_oabi_call_table, 对old ABI方式调用不兼容。只能 以EABI方式调用,用sys_call_table
第四 两个都没有配置 系统默认会只允许old ABI方式,但是不存在old_syscall_table,最终会通过sys_call_table 完成函数调用
用户空间如何让产生系统调用,即触发SWI异常
就看定义编译内核是默认是OABI还是EABI,可以看到新的EABI是r7传参方式
#ifndef CONFIG_CPU_THUMBONLY
#define ARM_OK(code...) code //正常都是这种
#else
#define ARM_OK(code...)
#endif
.align
sigreturn_codes:
/* ARM sigreturn syscall code snippet */
arm_slot 0
ARM_OK( mov r7, #(__NR_sigreturn - __NR_SYSCALL_BASE) )
ARM_OK( swi #(__NR_sigreturn)|(__NR_OABI_SYSCALL_BASE) )
/* Thumb sigreturn syscall code snippet */
thumb_slot 0
movs r7, #(__NR_sigreturn - __NR_SYSCALL_BASE)
swi #0
/* ARM sigreturn_rt syscall code snippet */
arm_slot 1
ARM_OK( mov r7, #(__NR_rt_sigreturn - __NR_SYSCALL_BASE) )
ARM_OK( swi #(__NR_rt_sigreturn)|(__NR_OABI_SYSCALL_BASE) )
/* Thumb sigreturn_rt syscall code snippet */
thumb_slot 1
movs r7, #(__NR_rt_sigreturn - __NR_SYSCALL_BASE)
swi #0通过上面的calls.S和下面两句可以知道,sys_call_table就是系统调用表的首地址。而#include "call.S"里面的内容在前面已经说明了,
就是以 .long sys_xxx 的函数的地址
.type sys_call_table, #object
ENTRY(sys_call_table)
#include "calls.S"方然也有老的调用接口,但对里面的系统调用函数,明显都是一样的
.type sys_oabi_call_table, #object
ENTRY(sys_oabi_call_table)
#include "calls.S"下面就是SWI异常处理函数的实现
/*=============================================================================
* SWI handler
*-----------------------------------------------------------------------------
*/
.align 5
ENTRY(vector_swi)
#ifdef CONFIG_CPU_V7M
v7m_exception_entry
#else
sub sp, sp, #S_FRAME_SIZE
stmia sp, {r0 - r12} @ Calling r0 - r12
ARM( add r8, sp, #S_PC )
ARM( stmdb r8, {sp, lr}^ ) @ Calling sp, lr
THUMB( mov r8, sp )
THUMB( store_user_sp_lr r8, r10, S_SP ) @ calling sp, lr
mrs r8, spsr @ called from non-FIQ mode, so ok.
str lr, [sp, #S_PC] @ Save calling PC
str r8, [sp, #S_PSR] @ Save CPSR
str r0, [sp, #S_OLD_R0] @ Save OLD_R0
#endif
zero_fp
alignment_trap ip, __cr_alignment
enable_irq
ct_user_exit
get_thread_info tsk
/*
* Get the system call number.
*/
#if defined(CONFIG_OABI_COMPAT)
/*
* If we have CONFIG_OABI_COMPAT then we need to look at the swi
* value to determine if it is an EABI or an old ABI call.
*/
#ifdef CONFIG_ARM_THUMB
tst r8, #PSR_T_BIT
movne r10, #0 @ no thumb OABI emulation
USER( ldreq r10, [lr, #-4] ) @ get SWI instruction
#else
USER( ldr r10, [lr, #-4] ) @ get SWI instruction
#endif
ARM_BE8(rev r10, r10) @ little endian instruction
#elif defined(CONFIG_AEABI)
/*
* Pure EABI user space always put syscall number into scno (r7).
*/
#elif defined(CONFIG_ARM_THUMB)
/* Legacy ABI only, possibly thumb mode. */
tst r8, #PSR_T_BIT @ this is SPSR from save_user_regs
addne scno, r7, #__NR_SYSCALL_BASE @ put OS number in
USER( ldreq scno, [lr, #-4] )
#else
/* Legacy ABI only. */
USER( ldr scno, [lr, #-4] ) @ get SWI instruction
#endif
adr tbl, sys_call_table @ load syscall table pointer
#if defined(CONFIG_OABI_COMPAT)
/*
* If the swi argument is zero, this is an EABI call and we do nothing.
*
* If this is an old ABI call, get the syscall number into scno and
* get the old ABI syscall table address.
*/
bics r10, r10, #0xff000000
eorne scno, r10, #__NR_OABI_SYSCALL_BASE
ldrne tbl, =sys_oabi_call_table
#elif !defined(CONFIG_AEABI)
bic scno, scno, #0xff000000 @ mask off SWI op-code
eor scno, scno, #__NR_SYSCALL_BASE @ check OS number
#endif
local_restart:
ldr r10, [tsk, #TI_FLAGS] @ check for syscall tracing
stmdb sp!, {r4, r5} @ push fifth and sixth args
tst r10, #_TIF_SYSCALL_WORK @ are we tracing syscalls?
bne __sys_trace
cmp scno, #NR_syscalls @ check upper syscall limit
adr lr, BSYM(ret_fast_syscall) @ return address
ldrcc pc, [tbl, scno, lsl #2] @ call sys_* routine
add r1, sp, #S_OFF
2: cmp scno, #(__ARM_NR_BASE - __NR_SYSCALL_BASE)
eor r0, scno, #__NR_SYSCALL_BASE @ put OS number back
bcs arm_syscall
mov why, #0 @ no longer a real syscall
b sys_ni_syscall @ not private func
#if defined(CONFIG_OABI_COMPAT) || !defined(CONFIG_AEABI)
/*
* We failed to handle a fault trying to access the page
* containing the swi instruction, but we're not really in a
* position to return -EFAULT. Instead, return back to the
* instruction and re-enter the user fault handling path trying
* to page it in. This will likely result in sending SEGV to the
* current task.
*/
9001:
sub lr, lr, #4
str lr, [sp, #S_PC]
b ret_fast_syscall
#endif
ENDPROC(vector_swi)
真正的系统调用则是用过下面这个函数实现的。
asmlinkage long sys_open(const char __user *filename,
int flags, umode_t mode);
SYSCALL_DEFINE3(open, const char __user *, filename, int, flags, umode_t, mode)
{
if (force_o_largefile())
flags |= O_LARGEFILE;
return do_sys_open(AT_FDCWD, filename, flags, mode);
}
SYSCALL_DEFINE3是一个宏,可以自己解析一下,实际下面的两个是一样的
asmlinkage long sys_open(const char __user *filename,int flags, umode_t mode);
SYSCALL_DEFINE3(open, const char __user *, filename, int, flags, umode_t, mode);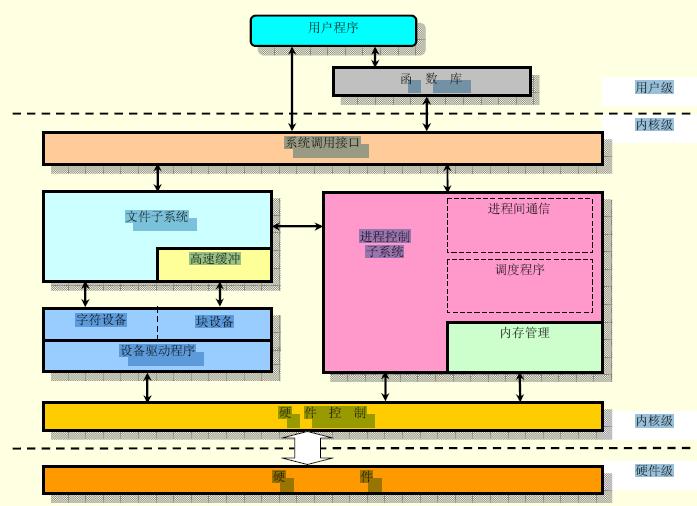
对照上图,可以看到应用程序使用系统调用接口,需要从用户级切换到内核级。
方法是:通过SWI指令和寄存器传入参数,通过输入的swi中断号,直接以查表方式找到对应的系统调用函数。
以open一个led灯为例:
可以看到调用顺序依次是应用程序 open -> swi软中断 -> 系统调用接口 -> sys_open ->
文件子系统VFS中的open -> 驱动程序open -> 硬件操作
其中应用程序空间的open需要通过swi指令来实现swi中断。
通过文件的属性(普通文件,设备文件),来不同的处理。
如果是设备文件,则继续通过属性查看是字符还是块设备文件,找到对应的驱动程序,最终操纵硬件。