前言
在前面的博客中( 三维重建学习(3):张正友相机标定推导),推到了张正友相机标定的数学原理,并给出了标定流程。OpenCV中已经封装好了一系列函数,我们使用这些函数可以更快捷地实现张正友相机标定。
程序流程
- 准备好一系列用来相机标定的图片;
- 对每张图片提取角点信息;
- 由于角点信息不够精确,进一步提取亚像素角点信息;
- 在图片中画出提取出的角点;
- 相机标定;
- 对标定结果评价,计算误差;
- 使用标定结果对原图片进行矫正;
上面这个流程大概看一遍有了个大概的认识就足够了。整个程序中都不涉及太深的数学,因为那些比较“恶心”的数学部分OpenCV都已经实现好了,我们直接调用就可以了。
关于其中的内外参矩阵等的参数不做赘述,前面的博客已经介绍过了: 三维重建学习(3):张正友相机标定推导。
流程说明
1. 准备图片
标定图片需要使用标定板在不同位置、不同角度、不同姿态下拍摄。在前面的博客中进行推导时,我们分析得知至少要有3张图片,才能有唯一解。通常以10~20张为佳。
通常都会购买专门的标定板,如果精度要求不高,也可以自己打印。
下面的图片摘自:http://blog.csdn.net/dcrmg/article/details/52939318
网上也有别人已经拍好的照片,下面是下载链接:https://pan.baidu.com/s/1mhG3mHU
程序中就直接使用这些现成的图片来测试了,省事。
2. 提取角点信息
OpenCV中自带了提取棋盘格中内角点的函数:findChessboardCorners()。
下面是函数原型:
CV_EXPORTS_W bool findChessboardCorners( InputArray image, Size patternSize, OutputArray corners,
int flags = CALIB_CB_ADAPTIVE_THRESH + CALIB_CB_NORMALIZE_IMAGE );
- 1
- 2
函数说明:
这个函数的功能是确定输入图像中是否有棋盘格图案,并检测棋盘格的内角点。如果所有的内角点都找到了,那么函数返回一个非0值;如果没有找到所有的内角点,就会返回0。
参数说明:
image:输入的棋盘格图像,必须是8位的灰度或彩色图像。patternSize:每一幅棋盘格图片中,每行和每列角点的个数;如果用前面给出的那副图片,每行每列对应的角点数就是4和6。另外为了便于辨别方向,每行每列对应的角点数不能相同。corners:输出的角点坐标。通常用cv::Point2f向量来保存,vector<cv::Point2f> points。flags:默认为0,也可为其他参数。决定了内角点的不同查找方式。(默认写0即可,下面是官方文档中的给出的可选取值)
- CALIB_CB_ADAPTIVE_THRESH 使用自适应阈值(通过平均图像亮度计算得到)将图像转换为黑白图,而不是一个固定的阈值。
- CALIB_CB_NORMALIZE_IMAGE 在使用固定阈值或者自适应阈值进行二值化之前,先使用equalizeHist()来均衡化图像亮度。
- CALIB_CB_FILTER_QUADS 使用其他的准则(如轮廓面积,周长,方形形状)来去除在轮廓检测阶段检测到的错误方块。
3. 提取亚像素角点信息
有两个函数可以实现提取亚像素角点信息:cornerSubPix、find4QuadCornerSubpix。在提取棋盘格角点时两者的效果差不多,随便使用哪一个都行。
void cornerSubPix(InputArray image, InputOutputArray corners, Size winSize, Size zeroZone, TermCriteria criteria)
- 1
参数说明:
image:输入的图像;corners:初始的角点坐标,同时也会作为亚像素角点坐标的输出;通常用cv::Point2f/Point2d向量来保存,vector<cv::Point2f/Point2d> points。winSize:大小为搜索窗口的一半。zeroZone:死区的一般尺寸,死区为不对搜索区的中央位置做求和运算的区域。criteria:迭代的终止条件。
CV_EXPORTS bool find4QuadCornerSubpix( InputArray img, InputOutputArray corners, Size region_size )
- 1
参数说明:
img:输入图像,最好是8位灰度图像,检测效率更高;corners:初始的角点坐标,同时也会作为亚像素角点坐标的输出;通常用cv::Point2f/Point2d向量来保存,vector<cv::Point2f/Point2d> points。region_size:角点搜索窗口的大小。
采用这两个函数都可实现亚像素角点检测,精度差不多,后面程序中采用find4QuadCornerSubpix函数。
4. 画出角点
使用drawChessboardCorners函数。函数功能很简单,就是在图片中画出检测到的角点。
CV_EXPORTS_W void drawChessboardCorners( InputOutputArray image, Size patternSize, InputArray corners, bool patternWasFound )
- 1
参数说明:
image:图像,8位灰度或彩色图像。patternSize:每一幅棋盘格图片中,每行和每列角点的个数。corners:初始的角点坐标,同时也会作为亚像素角点坐标的输出;通常用cv::Point2f/Point2d向量来保存,vector<cv::Point2f/Point2d> points。patternWasFound:标志位,用来只是是否检测倒所有的棋盘内角点。true表示完整地检测到了所有内角点,函数会用直线将角点依次连接起来;false表示没有完整检测到所有内角点,函数会用红色圆圈标出检测到的内角点。
5. 相机标定
这里的标定函数是calibrateCamera,也是相机标定的核心了。
CV_EXPORTS_W double calibrateCamera( InputArrayOfArrays objectPoints,
InputArrayOfArrays imagePoints, Size imageSize,
InputOutputArray cameraMatrix, InputOutputArray distCoeffs,
OutputArrayOfArrays rvecs, OutputArrayOfArrays tvecs,
int flags = 0, TermCriteria criteria = TermCriteria(
TermCriteria::COUNT + TermCriteria::EPS, 30, DBL_EPSILON) );
- 1
- 2
- 3
- 4
- 5
- 6
参数说明:
objectPoints:一系列点的三维坐标,即若干张图片中对应的若干个点的三维坐标。在使用时应该建立一个二维的vector,即vector<vector<Point3f>> objectPoints。我们需要根据棋盘格每个黑白格子的长宽,计算出各个内角点的三维坐标。通常我们会取z=0,而只计算x和y坐标。imagePoints:若干张图片对应的若干的内角点的坐标,通常采用vector<vector<Point2f>> image_points表示。imageSize:图像的像素尺寸大小。cameraMatrix:相机的内参矩阵,对应推导时的内参矩阵A” role=”presentation” style=”position: relative;”>AA。distCoeffs:相机的畸变参数矩阵,有5个畸变参数:k1,k2,p1,p2,k3” role=”presentation” style=”position: relative;”>k1,k2,p1,p2,k3k1,k2,p1,p2,k3。rvecs:旋转向量,罗德里格旋转向量,是相机外参;因为有若干张图片,所以通常使用Mat类型的vector表示,vector<Mat> rvecs。tvecs:位移向量,与旋转向量一样,也是相机外参,通常使用Mat类型的vector表示,vector<Mat> tvecs。flags:表示标定时采用的算法。默认为0,其他有:
- CV_CALIB_USE_INTRINSIC_GUESS:使用该参数时,在cameraMatrix矩阵中应该有fx,fy,u0,v0的估计值。否则的话,将初始化(u0,v0)图像的中心点,使用最小二乘估算出fx,fy。
- CV_CALIB_FIX_PRINCIPAL_POINT:在进行优化时会固定光轴点。当CV_CALIB_USE_INTRINSIC_GUESS参数被设置,光轴点将保持在中心或者某个输入的值。
- CV_CALIB_FIX_ASPECT_RATIO:固定fx/fy的比值,只将fy作为可变量,进行优化计算。当CV_CALIB_USE_INTRINSIC_GUESS没有被设置,fx和fy将会被忽略。只有fx/fy的比值在计算中会被用到。
- CV_CALIB_ZERO_TANGENT_DIST:设定切向畸变参数(p1,p2)为零。
- CV_CALIB_FIX_K1,…,CV_CALIB_FIX_K6:对应的径向畸变在优化中保持不变。
- CV_CALIB_RATIONAL_MODEL:计算k4,k5,k6三个畸变参数。如果没有设置,则只计算其它5个畸变参数。
criteria:迭代的终止条件。
这个函数解决的就是我们以前推导的极大似然优化问题:
其中: m^(A,ki,kj,Ri,ti,Mj)” role=”presentation” style=”position: relative;”>m^(A,ki,kj,Ri,ti,Mj)m^(A,ki,kj,Ri,ti,Mj)幅图像上的投影。
A” role=”presentation” style=”position: relative;”>AA是平移矩阵,对应参数中的
tvecs;其他还有一些畸变系数,根据情况可能考虑进去也可能忽略不计。
通过类比,不难理解这些参数的意义。
6. 评价标定结果
我们在进行相机标定时,本身要解决的是一个优化问题,而优化的对象就是角点与三维点投影到图像点坐标之间的差值,通过不断迭代,尽可能地最小化这个差值。我们对标定结果评价时,就是计算投影点与检测到的亚像素角点坐标的差值。由于是二维的,所以分别对x” role=”presentation” style=”position: relative;”>xx坐标求差值,再求平方根,即求L2范数。
先考虑如何对空间中的三维坐标点进行反向投影,使用函数projectPoints 实现:
CV_EXPORTS_W void projectPoints( InputArray objectPoints,
InputArray rvec, InputArray tvec,
InputArray cameraMatrix, InputArray distCoeffs,
OutputArray imagePoints,
OutputArray jacobian = noArray(),
double aspectRatio = 0 );
- 1
- 2
- 3
- 4
- 5
- 6
参数说明:
objectPoints:一系列点的三维坐标,即若干张图片中对应的若干个点的三维坐标。在使用时应该建立一个二维的vector,即vector<vector<Point3f>> objectPoints。我们需要根据棋盘格每个黑白格子的长宽,计算出各个内角点的三维坐标。通常我们会取z=0,而只计算x和y坐标。rvecs:旋转向量,罗德里格旋转向量,是相机外参;因为有若干张图片,所以通常使用Mat类型的vector表示,vector<Mat> rvecs。tvecs:位移向量,与旋转向量一样,也是相机外参,通常使用Mat类型的vector表示,vector<Mat> tvecs。cameraMatrix:相机的内参矩阵,对应推导时的内参矩阵A” role=”presentation” style=”position: relative;”>AA。distCoeffs:相机的畸变参数矩阵,有5个畸变参数:k1,k2,p1,p2,k3” role=”presentation” style=”position: relative;”>k1,k2,p1,p2,k3k1,k2,p1,p2,k3。imagePoints:若干张图片对应的若干的内角点的坐标,通常采用vector<vector<Point2f>> image_points表示。- 另外两个参数这里不会用到,跳过。
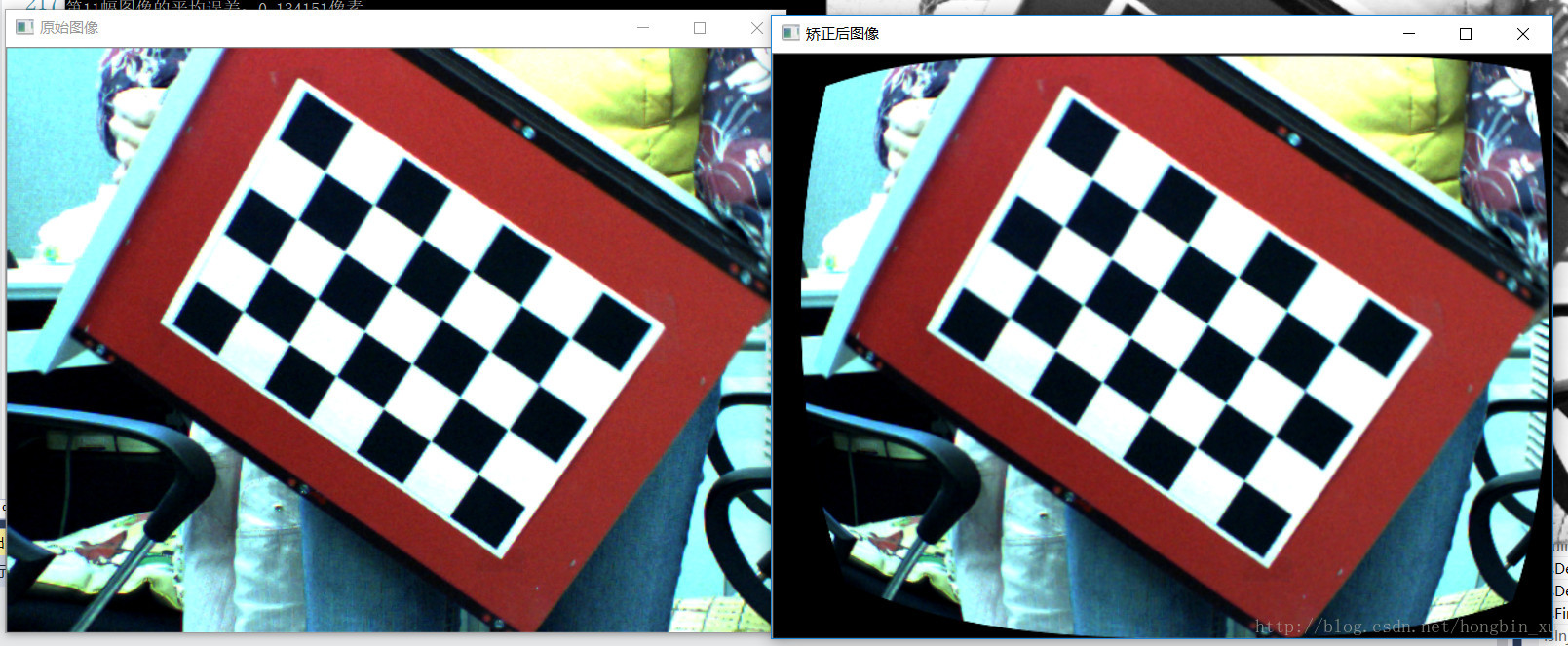
7. 矫正图像
使用前面求得的内参和外参以及畸变参数数据,可以对图像进行畸变矫正。
使用initUndistortRectifyMap和remap两个函数来实现。
initUndistortRectifyMap用来计算畸变映射,remap把求得的映射应用到图像上。
CV_EXPORTS_W void initUndistortRectifyMap( InputArray cameraMatrix, InputArray distCoeffs,
InputArray R, InputArray newCameraMatrix,
Size size, int m1type, OutputArray map1, OutputArray map2 );
- 1
- 2
- 3
参数说明:
cameraMatrix:相机的内参矩阵;distCoeffs:相机的畸变参数构成的矩阵;R:可选的输入,是第一和第二相机坐标之间的旋转矩阵;newCameraMatrix:校正后的内参矩阵;size:摄像机采集的无失真的图像尺寸;m1type:定义map1的数据类型,可以是CV_32FC1或者CV_16SC2;map1和map2:分别对应X” role=”presentation” style=”position: relative;”>XX坐标的重映射参数。
CV_EXPORTS_W void remap( InputArray src, OutputArray dst,
InputArray map1, InputArray map2,
int interpolation, int borderMode = BORDER_CONSTANT,
const Scalar& borderValue = Scalar());
- 1
- 2
- 3
- 4
参数说明:
src:输入图像,原始有畸变的图像;dst:输出图像,校正后的图像;map1:X” role=”presentation” style=”position: relative;”>XX坐标的映射;map2:Y” role=”presentation” style=”position: relative;”>YY坐标的映射;interpolation:图像的插值方式;borderMode:边界填充方式;
完整程序实现
#include <iostream>
#include <vector>
#include <fstream>
#include <string>
#include <opencv2/opencv.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/calib3d/calib3d.hpp>
using namespace std;
using namespace cv;
int main()
{
ifstream inImgPath("calibdata.txt"); //标定所用图像文件的路径
vector<string> imgList;
vector<string>::iterator p;
string temp;
if (!inImgPath.is_open())
{
cout << "没有找到文件" << endl;
}
//读取文件中保存的图片文件路径,并存放在数组中
while (getline(inImgPath, temp))
{
imgList.push_back(temp);
}
ofstream fout("caliberation_result.txt"); //保存标定结果的文件
cout << "开始提取角点......" << endl;
cv::Size image_size;//保存图片大小
cv::Size pattern_size = cv::Size(4, 6);//标定板上每行、每列的角点数;测试图片中的标定板上内角点数为4*6
vector<cv::Point2f> corner_points_buf;//建一个数组缓存检测到的角点,通常采用Point2f形式
vector<cv::Point2f>::iterator corner_points_buf_ptr;
vector<vector<cv::Point2f>> corner_points_of_all_imgs;
int image_num = 0;
string filename;
while(image_num < imgList.size())
{
filename = imgList[image_num++];
cout << "image_num = " << image_num << endl;
cout << filename.c_str() << endl;
cv::Mat imageInput = cv::imread(filename.c_str());
if (image_num == 1)
{
image_size.width = imageInput.cols;
image_size.height = imageInput.rows;
cout << "image_size.width = " << image_size.width << endl;
cout << "image_size.height = " << image_size.height << endl;
}
if (findChessboardCorners(imageInput, pattern_size, corner_points_buf) == 0)
{
cout << "can not find chessboard corners!\n"; //找不到角点
exit(1);
}
else
{
cv::Mat gray;
cv::cvtColor(imageInput, gray, CV_RGB2GRAY);
cv::find4QuadCornerSubpix(gray, corner_points_buf, cv::Size(5, 5));
corner_points_of_all_imgs.push_back(corner_points_buf);
cv::drawChessboardCorners(gray, pattern_size, corner_points_buf, true);
cv::imshow("camera calibration", gray);
cv::waitKey(100);
}
}
int total = corner_points_of_all_imgs.size();
cout << "total=" << total << endl;
int cornerNum = pattern_size.width * pattern_size.height;//每张图片上的总的角点数
for (int i = 0; i < total;i++)
{
cout << "--> 第" << i + 1 << "幅图片的数据 -->:" << endl;
for (int j = 0;j < cornerNum;j++)
{
cout << "-->" << corner_points_of_all_imgs[i][j].x;
cout << "-->" << corner_points_of_all_imgs[i][j].y;
if ((j + 1) % 3 == 0)
{
cout << endl;
}
else
{
cout.width(10);
}
}
cout << endl;
}
cout << endl << "角点提取完成" << endl;
//摄像机标定
cout << "开始标定………………" << endl;
cv::Mat cameraMatrix = cv::Mat(3, 3, CV_32FC1, cv::Scalar::all(0));//内外参矩阵,H——单应性矩阵
cv::Mat distCoefficients = cv::Mat(1, 5, CV_32FC1, cv::Scalar::all(0));//摄像机的5个畸变系数:k1,k2,p1,p2,k3
vector<cv::Mat> tvecsMat;//每幅图像的平移向量,t
vector<cv::Mat> rvecsMat;//每幅图像的旋转向量(罗德里格旋转向量)
vector<vector<cv::Point3f>> objectPoints;//保存所有图片的角点的三维坐标
//初始化每一张图片中标定板上角点的三维坐标
int i, j, k;
for (k = 0;k < image_num;k++)//遍历每一张图片
{
vector<cv::Point3f> tempCornerPoints;//每一幅图片对应的角点数组
//遍历所有的角点
for (i = 0;i < pattern_size.height;i++)
{
for (j = 0;j < pattern_size.width;j++)
{
cv::Point3f singleRealPoint;//一个角点的坐标
singleRealPoint.x = i * 10;
singleRealPoint.y = j * 10;
singleRealPoint.z = 0;//假设z=0
tempCornerPoints.push_back(singleRealPoint);
}
}
objectPoints.push_back(tempCornerPoints);
}
cv::calibrateCamera(objectPoints, corner_points_of_all_imgs, image_size, cameraMatrix, distCoefficients, rvecsMat, tvecsMat, 0);
cout << "标定完成" << endl;
//开始保存标定结果
cout << "开始保存标定结果" << endl;
cout << endl << "相机相关参数:" << endl;
fout << "相机相关参数:" << endl;
cout << "1.内外参数矩阵:" << endl;
fout << "1.内外参数矩阵:" << endl;
cout << "大小:" << cameraMatrix.size() << endl;
fout << "大小:" << cameraMatrix.size() << endl;
cout << cameraMatrix << endl;
fout << cameraMatrix << endl;
cout << "2.畸变系数:" << endl;
fout << "2.畸变系数:" << endl;
cout << "大小:" << distCoefficients.size() << endl;
fout << "大小:" << distCoefficients.size() << endl;
cout << distCoefficients << endl;
fout << distCoefficients << endl;
cout << endl << "图像相关参数:" << endl;
fout << endl << "图像相关参数:" << endl;
cv::Mat rotation_Matrix = cv::Mat(3, 3, CV_32FC1, cv::Scalar::all(0));//旋转矩阵
for (i = 0;i < image_num;i++)
{
cout << "第" << i + 1 << "幅图像的旋转向量:" << endl;
fout << "第" << i + 1 << "幅图像的旋转向量:" << endl;
cout << rvecsMat[i] << endl;
fout << rvecsMat[i] << endl;
cout << "第" << i + 1 << "幅图像的旋转矩阵:" << endl;
fout << "第" << i + 1 << "幅图像的旋转矩阵:" << endl;
cv::Rodrigues(rvecsMat[i], rotation_Matrix);//将旋转向量转换为相对应的旋转矩阵
cout << rotation_Matrix << endl;
fout << rotation_Matrix << endl;
cout << "第" << i + 1 << "幅图像的平移向量:" << endl;
fout << "第" << i + 1 << "幅图像的平移向量:" << endl;
cout << tvecsMat[i] << endl;
fout << tvecsMat[i] << endl;
}
cout << "结果保存完毕" << endl;
//对标定结果进行评价
cout << "开始评价标定结果......" << endl;
//计算每幅图像中的角点数量,假设全部角点都检测到了
int corner_points_counts;
corner_points_counts = pattern_size.width * pattern_size.height;
cout << "每幅图像的标定误差:" << endl;
fout << "每幅图像的标定误差:" << endl;
double err = 0;//单张图像的误差
double total_err = 0;//所有图像的平均误差
for (i = 0;i < image_num;i++)
{
vector<cv::Point2f> image_points_calculated;//存放新计算出的投影点的坐标
vector<cv::Point3f> tempPointSet = objectPoints[i];
cv::projectPoints(tempPointSet, rvecsMat[i], tvecsMat[i], cameraMatrix, distCoefficients, image_points_calculated);
//计算新的投影点与旧的投影点之间的误差
vector<cv::Point2f> image_points_old = corner_points_of_all_imgs[i];
//将两组数据换成Mat格式
cv::Mat image_points_calculated_mat = cv::Mat(1, image_points_calculated.size(), CV_32FC2);
cv::Mat image_points_old_mat = cv::Mat(1, image_points_old.size(), CV_32FC2);
for (j = 0;j < tempPointSet.size();j++)
{
image_points_calculated_mat.at<cv::Vec2f>(0, j) = cv::Vec2f(image_points_calculated[j].x, image_points_calculated[j].y);
image_points_old_mat.at<cv::Vec2f>(0, j) = cv::Vec2f(image_points_old[j].x, image_points_old[j].y);
}
err = cv::norm(image_points_calculated_mat, image_points_old_mat, cv::NORM_L2);
err /= corner_points_counts;
total_err += err;
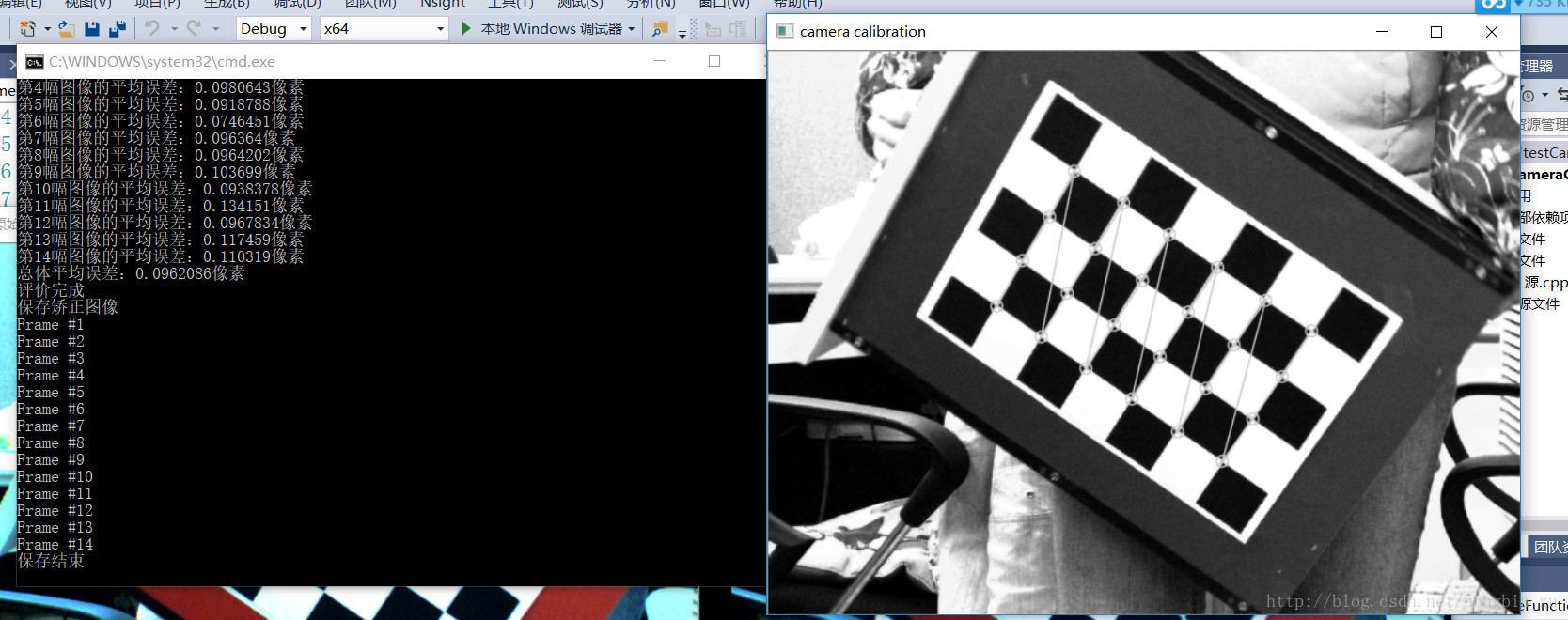
cout << "第" << i + 1 << "幅图像的平均误差:" << err << "像素" << endl;
fout << "第" << i + 1 << "幅图像的平均误差:" << err << "像素" << endl;
}
cout << "总体平均误差:" << total_err / image_num << "像素" << endl;
fout << "总体平均误差:" << total_err / image_num << "像素" << endl;
cout << "评价完成" << endl;
fout.close();
cv::Mat mapx = cv::Mat(image_size, CV_32FC1);
cv::Mat mapy = cv::Mat(image_size, CV_32FC1);
cv::Mat R = cv::Mat::eye(3, 3, CV_32F);
cout << "保存矫正图像" << endl;
string imageFileName;
std::stringstream StrStm;
for (int i = 0;i < image_num;i++)
{
cout << "Frame #" << i + 1 << endl;
cv::initUndistortRectifyMap(cameraMatrix, distCoefficients, R, cameraMatrix, image_size, CV_32FC1, mapx, mapy);
cv::Mat src_image = cv::imread(imgList[i].c_str(), 1);
cv::Mat new_image = src_image.clone();
cv::remap(src_image, new_image, mapx, mapy, cv::INTER_LINEAR);
imshow("原始图像", src_image);
imshow("矫正后图像", new_image);
StrStm.clear();
imageFileName.clear();
StrStm << i + 1;
StrStm >> imageFileName;
imageFileName += "_d.jpg";
cv::imwrite(imageFileName, new_image);
cv::waitKey(200);
}
cout << "保存结束" << endl;
cv::waitKey(0);
return 0;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
运行结果
完整工程:http://download.csdn.net/download/hongbin_xu/10191899
参考链接:
http://blog.csdn.net/dcrmg/article/details/52939318
转载自:https://blog.csdn.net/hongbin_xu/article/details/78988450#commentBox
前言
在前面的博客中( 三维重建学习(3):张正友相机标定推导),推到了张正友相机标定的数学原理,并给出了标定流程。OpenCV中已经封装好了一系列函数,我们使用这些函数可以更快捷地实现张正友相机标定。
程序流程
- 准备好一系列用来相机标定的图片;
- 对每张图片提取角点信息;
- 由于角点信息不够精确,进一步提取亚像素角点信息;
- 在图片中画出提取出的角点;
- 相机标定;
- 对标定结果评价,计算误差;
- 使用标定结果对原图片进行矫正;
上面这个流程大概看一遍有了个大概的认识就足够了。整个程序中都不涉及太深的数学,因为那些比较“恶心”的数学部分OpenCV都已经实现好了,我们直接调用就可以了。
关于其中的内外参矩阵等的参数不做赘述,前面的博客已经介绍过了: 三维重建学习(3):张正友相机标定推导。
流程说明
1. 准备图片
标定图片需要使用标定板在不同位置、不同角度、不同姿态下拍摄。在前面的博客中进行推导时,我们分析得知至少要有3张图片,才能有唯一解。通常以10~20张为佳。
通常都会购买专门的标定板,如果精度要求不高,也可以自己打印。
下面的图片摘自:http://blog.csdn.net/dcrmg/article/details/52939318
网上也有别人已经拍好的照片,下面是下载链接:https://pan.baidu.com/s/1mhG3mHU
程序中就直接使用这些现成的图片来测试了,省事。
2. 提取角点信息
OpenCV中自带了提取棋盘格中内角点的函数:findChessboardCorners()。
下面是函数原型:
CV_EXPORTS_W bool findChessboardCorners( InputArray image, Size patternSize, OutputArray corners,
int flags = CALIB_CB_ADAPTIVE_THRESH + CALIB_CB_NORMALIZE_IMAGE );
- 1
- 2
函数说明:
这个函数的功能是确定输入图像中是否有棋盘格图案,并检测棋盘格的内角点。如果所有的内角点都找到了,那么函数返回一个非0值;如果没有找到所有的内角点,就会返回0。
参数说明:
image:输入的棋盘格图像,必须是8位的灰度或彩色图像。patternSize:每一幅棋盘格图片中,每行和每列角点的个数;如果用前面给出的那副图片,每行每列对应的角点数就是4和6。另外为了便于辨别方向,每行每列对应的角点数不能相同。corners:输出的角点坐标。通常用cv::Point2f向量来保存,vector<cv::Point2f> points。flags:默认为0,也可为其他参数。决定了内角点的不同查找方式。(默认写0即可,下面是官方文档中的给出的可选取值)
- CALIB_CB_ADAPTIVE_THRESH 使用自适应阈值(通过平均图像亮度计算得到)将图像转换为黑白图,而不是一个固定的阈值。
- CALIB_CB_NORMALIZE_IMAGE 在使用固定阈值或者自适应阈值进行二值化之前,先使用equalizeHist()来均衡化图像亮度。
- CALIB_CB_FILTER_QUADS 使用其他的准则(如轮廓面积,周长,方形形状)来去除在轮廓检测阶段检测到的错误方块。
3. 提取亚像素角点信息
有两个函数可以实现提取亚像素角点信息:cornerSubPix、find4QuadCornerSubpix。在提取棋盘格角点时两者的效果差不多,随便使用哪一个都行。
void cornerSubPix(InputArray image, InputOutputArray corners, Size winSize, Size zeroZone, TermCriteria criteria)
- 1
参数说明:
image:输入的图像;corners:初始的角点坐标,同时也会作为亚像素角点坐标的输出;通常用cv::Point2f/Point2d向量来保存,vector<cv::Point2f/Point2d> points。winSize:大小为搜索窗口的一半。zeroZone:死区的一般尺寸,死区为不对搜索区的中央位置做求和运算的区域。criteria:迭代的终止条件。
CV_EXPORTS bool find4QuadCornerSubpix( InputArray img, InputOutputArray corners, Size region_size )
- 1
参数说明:
img:输入图像,最好是8位灰度图像,检测效率更高;corners:初始的角点坐标,同时也会作为亚像素角点坐标的输出;通常用cv::Point2f/Point2d向量来保存,vector<cv::Point2f/Point2d> points。region_size:角点搜索窗口的大小。
采用这两个函数都可实现亚像素角点检测,精度差不多,后面程序中采用find4QuadCornerSubpix函数。
4. 画出角点
使用drawChessboardCorners函数。函数功能很简单,就是在图片中画出检测到的角点。
CV_EXPORTS_W void drawChessboardCorners( InputOutputArray image, Size patternSize, InputArray corners, bool patternWasFound )
- 1
参数说明:
image:图像,8位灰度或彩色图像。patternSize:每一幅棋盘格图片中,每行和每列角点的个数。corners:初始的角点坐标,同时也会作为亚像素角点坐标的输出;通常用cv::Point2f/Point2d向量来保存,vector<cv::Point2f/Point2d> points。patternWasFound:标志位,用来只是是否检测倒所有的棋盘内角点。true表示完整地检测到了所有内角点,函数会用直线将角点依次连接起来;false表示没有完整检测到所有内角点,函数会用红色圆圈标出检测到的内角点。
5. 相机标定
这里的标定函数是calibrateCamera,也是相机标定的核心了。
CV_EXPORTS_W double calibrateCamera( InputArrayOfArrays objectPoints,
InputArrayOfArrays imagePoints, Size imageSize,
InputOutputArray cameraMatrix, InputOutputArray distCoeffs,
OutputArrayOfArrays rvecs, OutputArrayOfArrays tvecs,
int flags = 0, TermCriteria criteria = TermCriteria(
TermCriteria::COUNT + TermCriteria::EPS, 30, DBL_EPSILON) );
- 1
- 2
- 3
- 4
- 5
- 6
参数说明:
objectPoints:一系列点的三维坐标,即若干张图片中对应的若干个点的三维坐标。在使用时应该建立一个二维的vector,即vector<vector<Point3f>> objectPoints。我们需要根据棋盘格每个黑白格子的长宽,计算出各个内角点的三维坐标。通常我们会取z=0,而只计算x和y坐标。imagePoints:若干张图片对应的若干的内角点的坐标,通常采用vector<vector<Point2f>> image_points表示。imageSize:图像的像素尺寸大小。cameraMatrix:相机的内参矩阵,对应推导时的内参矩阵A” role=”presentation” style=”position: relative;”>AA。distCoeffs:相机的畸变参数矩阵,有5个畸变参数:k1,k2,p1,p2,k3” role=”presentation” style=”position: relative;”>k1,k2,p1,p2,k3k1,k2,p1,p2,k3。rvecs:旋转向量,罗德里格旋转向量,是相机外参;因为有若干张图片,所以通常使用Mat类型的vector表示,vector<Mat> rvecs。tvecs:位移向量,与旋转向量一样,也是相机外参,通常使用Mat类型的vector表示,vector<Mat> tvecs。flags:表示标定时采用的算法。默认为0,其他有:
- CV_CALIB_USE_INTRINSIC_GUESS:使用该参数时,在cameraMatrix矩阵中应该有fx,fy,u0,v0的估计值。否则的话,将初始化(u0,v0)图像的中心点,使用最小二乘估算出fx,fy。
- CV_CALIB_FIX_PRINCIPAL_POINT:在进行优化时会固定光轴点。当CV_CALIB_USE_INTRINSIC_GUESS参数被设置,光轴点将保持在中心或者某个输入的值。
- CV_CALIB_FIX_ASPECT_RATIO:固定fx/fy的比值,只将fy作为可变量,进行优化计算。当CV_CALIB_USE_INTRINSIC_GUESS没有被设置,fx和fy将会被忽略。只有fx/fy的比值在计算中会被用到。
- CV_CALIB_ZERO_TANGENT_DIST:设定切向畸变参数(p1,p2)为零。
- CV_CALIB_FIX_K1,…,CV_CALIB_FIX_K6:对应的径向畸变在优化中保持不变。
- CV_CALIB_RATIONAL_MODEL:计算k4,k5,k6三个畸变参数。如果没有设置,则只计算其它5个畸变参数。
criteria:迭代的终止条件。
这个函数解决的就是我们以前推导的极大似然优化问题:
其中: m^(A,ki,kj,Ri,ti,Mj)” role=”presentation” style=”position: relative;”>m^(A,ki,kj,Ri,ti,Mj)m^(A,ki,kj,Ri,ti,Mj)幅图像上的投影。
A” role=”presentation” style=”position: relative;”>AA是平移矩阵,对应参数中的
tvecs;其他还有一些畸变系数,根据情况可能考虑进去也可能忽略不计。
通过类比,不难理解这些参数的意义。
6. 评价标定结果
我们在进行相机标定时,本身要解决的是一个优化问题,而优化的对象就是角点与三维点投影到图像点坐标之间的差值,通过不断迭代,尽可能地最小化这个差值。我们对标定结果评价时,就是计算投影点与检测到的亚像素角点坐标的差值。由于是二维的,所以分别对x” role=”presentation” style=”position: relative;”>xx坐标求差值,再求平方根,即求L2范数。
先考虑如何对空间中的三维坐标点进行反向投影,使用函数projectPoints 实现:
CV_EXPORTS_W void projectPoints( InputArray objectPoints,
InputArray rvec, InputArray tvec,
InputArray cameraMatrix, InputArray distCoeffs,
OutputArray imagePoints,
OutputArray jacobian = noArray(),
double aspectRatio = 0 );
- 1
- 2
- 3
- 4
- 5
- 6
参数说明:
objectPoints:一系列点的三维坐标,即若干张图片中对应的若干个点的三维坐标。在使用时应该建立一个二维的vector,即vector<vector<Point3f>> objectPoints。我们需要根据棋盘格每个黑白格子的长宽,计算出各个内角点的三维坐标。通常我们会取z=0,而只计算x和y坐标。rvecs:旋转向量,罗德里格旋转向量,是相机外参;因为有若干张图片,所以通常使用Mat类型的vector表示,vector<Mat> rvecs。tvecs:位移向量,与旋转向量一样,也是相机外参,通常使用Mat类型的vector表示,vector<Mat> tvecs。cameraMatrix:相机的内参矩阵,对应推导时的内参矩阵A” role=”presentation” style=”position: relative;”>AA。distCoeffs:相机的畸变参数矩阵,有5个畸变参数:k1,k2,p1,p2,k3” role=”presentation” style=”position: relative;”>k1,k2,p1,p2,k3k1,k2,p1,p2,k3。imagePoints:若干张图片对应的若干的内角点的坐标,通常采用vector<vector<Point2f>> image_points表示。- 另外两个参数这里不会用到,跳过。
7. 矫正图像
使用前面求得的内参和外参以及畸变参数数据,可以对图像进行畸变矫正。
使用initUndistortRectifyMap和remap两个函数来实现。
initUndistortRectifyMap用来计算畸变映射,remap把求得的映射应用到图像上。
CV_EXPORTS_W void initUndistortRectifyMap( InputArray cameraMatrix, InputArray distCoeffs,
InputArray R, InputArray newCameraMatrix,
Size size, int m1type, OutputArray map1, OutputArray map2 );
- 1
- 2
- 3
参数说明:
cameraMatrix:相机的内参矩阵;distCoeffs:相机的畸变参数构成的矩阵;R:可选的输入,是第一和第二相机坐标之间的旋转矩阵;newCameraMatrix:校正后的内参矩阵;size:摄像机采集的无失真的图像尺寸;m1type:定义map1的数据类型,可以是CV_32FC1或者CV_16SC2;map1和map2:分别对应X” role=”presentation” style=”position: relative;”>XX坐标的重映射参数。
CV_EXPORTS_W void remap( InputArray src, OutputArray dst,
InputArray map1, InputArray map2,
int interpolation, int borderMode = BORDER_CONSTANT,
const Scalar& borderValue = Scalar());
- 1
- 2
- 3
- 4
参数说明:
src:输入图像,原始有畸变的图像;dst:输出图像,校正后的图像;map1:X” role=”presentation” style=”position: relative;”>XX坐标的映射;map2:Y” role=”presentation” style=”position: relative;”>YY坐标的映射;interpolation:图像的插值方式;borderMode:边界填充方式;
完整程序实现
#include <iostream>
#include <vector>
#include <fstream>
#include <string>
#include <opencv2/opencv.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/calib3d/calib3d.hpp>
using namespace std;
using namespace cv;
int main()
{
ifstream inImgPath("calibdata.txt"); //标定所用图像文件的路径
vector<string> imgList;
vector<string>::iterator p;
string temp;
if (!inImgPath.is_open())
{
cout << "没有找到文件" << endl;
}
//读取文件中保存的图片文件路径,并存放在数组中
while (getline(inImgPath, temp))
{
imgList.push_back(temp);
}
ofstream fout("caliberation_result.txt"); //保存标定结果的文件
cout << "开始提取角点......" << endl;
cv::Size image_size;//保存图片大小
cv::Size pattern_size = cv::Size(4, 6);//标定板上每行、每列的角点数;测试图片中的标定板上内角点数为4*6
vector<cv::Point2f> corner_points_buf;//建一个数组缓存检测到的角点,通常采用Point2f形式
vector<cv::Point2f>::iterator corner_points_buf_ptr;
vector<vector<cv::Point2f>> corner_points_of_all_imgs;
int image_num = 0;
string filename;
while(image_num < imgList.size())
{
filename = imgList[image_num++];
cout << "image_num = " << image_num << endl;
cout << filename.c_str() << endl;
cv::Mat imageInput = cv::imread(filename.c_str());
if (image_num == 1)
{
image_size.width = imageInput.cols;
image_size.height = imageInput.rows;
cout << "image_size.width = " << image_size.width << endl;
cout << "image_size.height = " << image_size.height << endl;
}
if (findChessboardCorners(imageInput, pattern_size, corner_points_buf) == 0)
{
cout << "can not find chessboard corners!\n"; //找不到角点
exit(1);
}
else
{
cv::Mat gray;
cv::cvtColor(imageInput, gray, CV_RGB2GRAY);
cv::find4QuadCornerSubpix(gray, corner_points_buf, cv::Size(5, 5));
corner_points_of_all_imgs.push_back(corner_points_buf);
cv::drawChessboardCorners(gray, pattern_size, corner_points_buf, true);
cv::imshow("camera calibration", gray);
cv::waitKey(100);
}
}
int total = corner_points_of_all_imgs.size();
cout << "total=" << total << endl;
int cornerNum = pattern_size.width * pattern_size.height;//每张图片上的总的角点数
for (int i = 0; i < total;i++)
{
cout << "--> 第" << i + 1 << "幅图片的数据 -->:" << endl;
for (int j = 0;j < cornerNum;j++)
{
cout << "-->" << corner_points_of_all_imgs[i][j].x;
cout << "-->" << corner_points_of_all_imgs[i][j].y;
if ((j + 1) % 3 == 0)
{
cout << endl;
}
else
{
cout.width(10);
}
}
cout << endl;
}
cout << endl << "角点提取完成" << endl;
//摄像机标定
cout << "开始标定………………" << endl;
cv::Mat cameraMatrix = cv::Mat(3, 3, CV_32FC1, cv::Scalar::all(0));//内外参矩阵,H——单应性矩阵
cv::Mat distCoefficients = cv::Mat(1, 5, CV_32FC1, cv::Scalar::all(0));//摄像机的5个畸变系数:k1,k2,p1,p2,k3
vector<cv::Mat> tvecsMat;//每幅图像的平移向量,t
vector<cv::Mat> rvecsMat;//每幅图像的旋转向量(罗德里格旋转向量)
vector<vector<cv::Point3f>> objectPoints;//保存所有图片的角点的三维坐标
//初始化每一张图片中标定板上角点的三维坐标
int i, j, k;
for (k = 0;k < image_num;k++)//遍历每一张图片
{
vector<cv::Point3f> tempCornerPoints;//每一幅图片对应的角点数组
//遍历所有的角点
for (i = 0;i < pattern_size.height;i++)
{
for (j = 0;j < pattern_size.width;j++)
{
cv::Point3f singleRealPoint;//一个角点的坐标
singleRealPoint.x = i * 10;
singleRealPoint.y = j * 10;
singleRealPoint.z = 0;//假设z=0
tempCornerPoints.push_back(singleRealPoint);
}
}
objectPoints.push_back(tempCornerPoints);
}
cv::calibrateCamera(objectPoints, corner_points_of_all_imgs, image_size, cameraMatrix, distCoefficients, rvecsMat, tvecsMat, 0);
cout << "标定完成" << endl;
//开始保存标定结果
cout << "开始保存标定结果" << endl;
cout << endl << "相机相关参数:" << endl;
fout << "相机相关参数:" << endl;
cout << "1.内外参数矩阵:" << endl;
fout << "1.内外参数矩阵:" << endl;
cout << "大小:" << cameraMatrix.size() << endl;
fout << "大小:" << cameraMatrix.size() << endl;
cout << cameraMatrix << endl;
fout << cameraMatrix << endl;
cout << "2.畸变系数:" << endl;
fout << "2.畸变系数:" << endl;
cout << "大小:" << distCoefficients.size() << endl;
fout << "大小:" << distCoefficients.size() << endl;
cout << distCoefficients << endl;
fout << distCoefficients << endl;
cout << endl << "图像相关参数:" << endl;
fout << endl << "图像相关参数:" << endl;
cv::Mat rotation_Matrix = cv::Mat(3, 3, CV_32FC1, cv::Scalar::all(0));//旋转矩阵
for (i = 0;i < image_num;i++)
{
cout << "第" << i + 1 << "幅图像的旋转向量:" << endl;
fout << "第" << i + 1 << "幅图像的旋转向量:" << endl;
cout << rvecsMat[i] << endl;
fout << rvecsMat[i] << endl;
cout << "第" << i + 1 << "幅图像的旋转矩阵:" << endl;
fout << "第" << i + 1 << "幅图像的旋转矩阵:" << endl;
cv::Rodrigues(rvecsMat[i], rotation_Matrix);//将旋转向量转换为相对应的旋转矩阵
cout << rotation_Matrix << endl;
fout << rotation_Matrix << endl;
cout << "第" << i + 1 << "幅图像的平移向量:" << endl;
fout << "第" << i + 1 << "幅图像的平移向量:" << endl;
cout << tvecsMat[i] << endl;
fout << tvecsMat[i] << endl;
}
cout << "结果保存完毕" << endl;
//对标定结果进行评价
cout << "开始评价标定结果......" << endl;
//计算每幅图像中的角点数量,假设全部角点都检测到了
int corner_points_counts;
corner_points_counts = pattern_size.width * pattern_size.height;
cout << "每幅图像的标定误差:" << endl;
fout << "每幅图像的标定误差:" << endl;
double err = 0;//单张图像的误差
double total_err = 0;//所有图像的平均误差
for (i = 0;i < image_num;i++)
{
vector<cv::Point2f> image_points_calculated;//存放新计算出的投影点的坐标
vector<cv::Point3f> tempPointSet = objectPoints[i];
cv::projectPoints(tempPointSet, rvecsMat[i], tvecsMat[i], cameraMatrix, distCoefficients, image_points_calculated);
//计算新的投影点与旧的投影点之间的误差
vector<cv::Point2f> image_points_old = corner_points_of_all_imgs[i];
//将两组数据换成Mat格式
cv::Mat image_points_calculated_mat = cv::Mat(1, image_points_calculated.size(), CV_32FC2);
cv::Mat image_points_old_mat = cv::Mat(1, image_points_old.size(), CV_32FC2);
for (j = 0;j < tempPointSet.size();j++)
{
image_points_calculated_mat.at<cv::Vec2f>(0, j) = cv::Vec2f(image_points_calculated[j].x, image_points_calculated[j].y);
image_points_old_mat.at<cv::Vec2f>(0, j) = cv::Vec2f(image_points_old[j].x, image_points_old[j].y);
}
err = cv::norm(image_points_calculated_mat, image_points_old_mat, cv::NORM_L2);
err /= corner_points_counts;
total_err += err;
cout << "第" << i + 1 << "幅图像的平均误差:" << err << "像素" << endl;
fout << "第" << i + 1 << "幅图像的平均误差:" << err << "像素" << endl;
}
cout << "总体平均误差:" << total_err / image_num << "像素" << endl;
fout << "总体平均误差:" << total_err / image_num << "像素" << endl;
cout << "评价完成" << endl;
fout.close();
cv::Mat mapx = cv::Mat(image_size, CV_32FC1);
cv::Mat mapy = cv::Mat(image_size, CV_32FC1);
cv::Mat R = cv::Mat::eye(3, 3, CV_32F);
cout << "保存矫正图像" << endl;
string imageFileName;
std::stringstream StrStm;
for (int i = 0;i < image_num;i++)
{
cout << "Frame #" << i + 1 << endl;
cv::initUndistortRectifyMap(cameraMatrix, distCoefficients, R, cameraMatrix, image_size, CV_32FC1, mapx, mapy);
cv::Mat src_image = cv::imread(imgList[i].c_str(), 1);
cv::Mat new_image = src_image.clone();
cv::remap(src_image, new_image, mapx, mapy, cv::INTER_LINEAR);
imshow("原始图像", src_image);
imshow("矫正后图像", new_image);
StrStm.clear();
imageFileName.clear();
StrStm << i + 1;
StrStm >> imageFileName;
imageFileName += "_d.jpg";
cv::imwrite(imageFileName, new_image);
cv::waitKey(200);
}
cout << "保存结束" << endl;
cv::waitKey(0);
return 0;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
运行结果
完整工程:http://download.csdn.net/download/hongbin_xu/10191899
参考链接:
http://blog.csdn.net/dcrmg/article/details/52939318
转载自:https://blog.csdn.net/hongbin_xu/article/details/78988450#commentBox