最近学习了stm32,就想用它来控制舵机,然后写下这篇文章分享给大家,如果有理解不到位的地方欢迎大家指正。(我使用的是stm32f103ve型号的开发板,即使和你的型号不同,也有参考价值)
想要控制舵机的转动,首先你得知道舵的工作原理。
舵机的主要组成部分为伺服电机,所谓伺服就是服从信号的要求而动作。在信号来之前,转子停止不动;信号来到之后,转子立即运动。因此我们就可以给舵机输入不同的信号,来控制其旋转到不同的角度。
舵机接收的是PWM信号,当信号进入内部电路产生一个偏置电压,触发电机通过减速齿轮带动电位器移动,使电压差为零时,电机停转,从而达到伺服的效果。简单来说就是给舵机一个特定的PWM信号,舵机就可以旋转到指定的位置。
舵机上有三根线,分别是GND、VCC和SIG,也就是地线、电源线和信号线,其中的PWM波就是从信号线输入给舵机的。
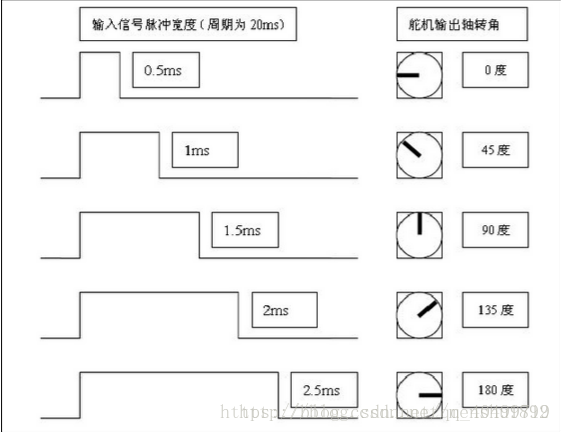
一般来说,舵机接收的PWM信号频率为50HZ,即周期为20ms。当高电平的脉宽在0.5ms-2.5ms之间时舵机就可以对应旋转到不同的角度。如下图。
那么我们如何使用stm32给舵机输入信号,让它听从我们的指挥呢?
想要输出PWM信号自然就得用上TIM定时器,而基本定时器没有PWM信号的输出功能,所以只能选用通用定时器和高级定时器。对于初始化这些外设无非也就是那些套路,我总结为如下几点:1、开启该外设的时钟2、配置初始化结构体(如果有对应的GPIO还需要初始化该GPIO)3、调用结构体初始化函数4、该使能的使能
对于TIM来说初始化结构体有两个,分别是时基结构体和输出比较结构体,除此之外还需要做的是先选择具体开启哪条输出通道,我选择的是TIM1(高级定时器)的CH1(通道一),对应的GPIO是PA8。我还初始化了通道一的互补通道PB13,为了更加方便测试。下面是初始化部分的代码。
static void TIM_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// 输出比较通道 GPIO 初始化
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 输出比较通道互补通道 GPIO 初始化
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
// BKIN引脚默认先输出低电平
GPIO_ResetBits(ADVANCE_TIM_BKIN_PORT,ADVANCE_TIM_BKIN_PIN);
}
static void Advance_TIM_Config(void)
{
// 开启定时器时钟,即内部时钟CK_INT=72M
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE);
/*--------------------时基结构体初始化-------------------------*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
// 自动重装载寄存器的值,累计TIM_Period+1个频率后产生一个更新或者中断
TIM_TimeBaseStructure.TIM_Period= (200-1);
// 驱动CNT计数器的时钟 = Fck_int/(psc+1)
TIM_TimeBaseStructure.TIM_Prescaler= (7200-1);
// 时钟分频因子 ,用于配置死区时间,没用到,随意
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
// 计数器计数模式,设置为向上计数
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;
// 重复计数器的值,没用到,可以随意设置
TIM_TimeBaseStructure.TIM_RepetitionCounter=0;
// 初始化定时器
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
/*--------------------输出比较结构体初始化-------------------*/
TIM_OCInitTypeDef TIM_OCInitStructure;
// 配置为PWM模式2
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
// 输出使能
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
// 互补输出使能
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;
// 设置占空比大小
TIM_OCInitStructure.TIM_Pulse = 0;
// 输出通道电平极性配置
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
// 互补输出通道电平极性配置
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High;
// 输出通道空闲电平极性配置
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set;
// 互补输出通道空闲电平极性配置
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset;
TIM_OC1Init(ADVANCE_TIM, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable);
// 使能计数器
TIM_Cmd(TIM1, ENABLE);
// 主输出使能,当使用的是通用定时器时,这句不需要
TIM_CtrlPWMOutputs(TIM1, ENABLE);
}
void TIM_Init(void)
{
TIM_GPIO_Config();
Advance_TIM_Config();
}在代码中要特别注意的是时基结构体的TIM_Period(自动重装载寄存器值,简称arr)和TIM_Prescaler(预分频寄存器值,简称psc),因为这两个决定了输出PWM信号的周期。具体的周期计算公式为:周期=(arr+1)*(psc+1)/CLK。其中CLK为计数器的时钟频率,我的是72MHZ,也就是72000000。最后计算结果单位为秒,结果为0.02s,也就是20ms。这样的配置就是为了让输出的PWM信号达到前面说到的舵机要求的20ms周期。
在初始化完成之后,就可以在main函数中实现信号的输出了。
前面说过,在周期20ms的PWM信号中,不同的脉宽对应舵机不同的转动角度,在0.5ms-2.5ms间有效,因此我们可以在main函数中配置几个不同的脉宽。要注意的是stm32并不直接配置脉宽,而是通过配置占空比来配置脉宽的。如果说脉宽是一个周期中的高电平那么占空比就是之中的低电平,简单说,假如脉宽2ms那么占空比就是20ms-2ms=18ms。
配置占空比有个重要的函数TIM_SetCompare1(),具体用法如果不懂可以去看手册。main函数代码如下。
#include "stm32f10x.h"
#include "bsp_Advance_tim.h"
#include "delay.h"
int main(void)
{
int delay_time;
delay_init(); //延时函数初始化
TIM_Init(); //定时器初始化
delay_time = 500;
while(1)
{
delay_ms(delay_time);
TIM_SetCompare1(ADVANCE_TIM, 175); //对应180度
delay_ms(delay_time);
TIM_SetCompare1(ADVANCE_TIM, 180); //对应135度
delay_ms(delay_time);
TIM_SetCompare1(ADVANCE_TIM, 185); //对应90度
delay_ms(delay_time);
TIM_SetCompare1(ADVANCE_TIM, 190); //对应45度
delay_ms(delay_time);
TIM_SetCompare1(ADVANCE_TIM, 195); //对应0度
}
}如果在定时器初始化时TIM_OCInitStructure.TIM_OCMode配置的是PWM1模式那么main中的占空比就依次为25、20、15、10、5。在你们自己试验时,可以将占空比设置成各种不同的值,看看有什么不同的效果。