转载请注明出处: https://yakir-yang.github.io/
调度
Linux 的进程调度是基于 “处理器比重” 策略,具体实现通过 vruntime 成员。所有进程以各自的 vruntime 作为 Key,链接成为一个 RBTree。调度核心通过查找最小的 vruntime 对应的进程,作为下一刻需要运行的进程。vruntime 作为进程调度的核心,那它的计算方法是什么?
应用程序进行系统调用(system call)时,通过 软中断(soft irq) 陷入内核态,将 系统调用号 以及 参数指针 通过 CPU 通用寄存器 传入(exp. eax, ebx…),由内核代表应用程序在 内核空间 执行系统调用。
Linux 内核常用的 内建数据结构 : 链表 list, 队列 kfifo, 映射 idr, 二叉树 rbtree
中断
Linux 中断实现机制怎样? 中断发生时,通过 中断向量表 跳转到预定义入口点。初始入口点将 中断号保存在栈中,然后跳转调用
unsigned int do_IRQ(struct pt_regs regs)进行处理。因为 C 的调用惯例是要把函数参数放在 栈的顶部,因此可以从 pt_regs 结构中提取出中断号 进行进一步处理。什么是中断上下文?当执行一个中断处理程序时,内核即处于中断上下文 (interrupt context) 中。
为什么中断里面不能休眠? 因为没有后备进程,所以中断上下文不可以休眠,否则又怎能对它重新调度呢? 这段话中的,后备进程 要怎么理解? 中断栈又是什么鬼?
为什么中断处理需要分成 上半部 和 下半部 ? 上半部分 简单快速,执行的时候禁止一些或者全部中断。 下半部分 稍后执行,而且执行期间可以相应所有的中断。这种设计可使系统处于中断屏蔽状态的时间尽可能的短,以此来提高系统的相应能力。
softirq 和 sys_call 中的软中断意义是否一致? 答案是:不一致!sys_call 中的软中断指的是 体系结构 预留的软中断,有固定的中断号,触发后 立即 经由中断向量表进行映射跳转;softirq 中的软中断仅仅是一种 软件机制,维护一组静态注册的回调函数列表,触发后 无法立即 回调处理函数,需等待时机 (硬中断代码返回、ksoftirqd 内核线程中、do_softirq 显示调用刷新)
softirq 中为什么不能休眠? 难道是 softirq 是处于中断上下文 interrupt context?
tasklet 和 工作队列 的主要区别? tasklet 是 基于 softirq 实现,调用者将目标 tasklet 注册到
__this_cpu(更好利用处理器的高速缓存)的 tasklet list 中,然后触发软中断等待执行,回调处理中 不允许休眠; 工作队列 是 基于 内核线程kthread 和 等待队列 waitqueue 实现,硬中断函数中唤醒对应内核线程,在线程函数中检查并遍历执行 worklist,回调处理中 允许调度及休眠 。扫描二维码关注公众号,回复: 2922280 查看本文章
同步
- 为什么全局变量自加操作,在多线程中是不安全的? 请看以下例子:
| 线程 1 | 线程 2 | 线程 1 | 线程 2 | |
|---|---|---|---|---|
| 获得 i (7) | 获得 i (7) | 获得 i (7) | ||
| 增加 i (7->8) | 增加 i (7->8) | |||
| 写回 i (8) | 增加 i (7->8) | |||
| 获得 i (8) | 写回 i (8) | |||
| 增加 i (8->9) | 写回 i (8) | |||
| 写回 i (9) |
- 造成并发执行的原因?为什么数据需要同步?
- Userspace: 用户程序在任何时刻都可能 被调度程序抢占和重新调度;
- Userspace: 异步发生的 信号 处理(什么信号?)
- Kernel: 中断 — 几乎可以任何时刻异步发生
- Kernel: 软中断和 tasklet — 内核能在 任何时刻 唤醒或调度 软中断 和 tasklet ( 怎么理解这里的任何时刻?具体是什么 Case 下? )
- Kernel: 内核抢占 — 内核具有抢占性,内核中的任务可能会被另一任务抢占
- Kernel: 睡眠及用户空间的同步 — 内核执行的进程可能会睡眠,这就会 唤醒调度程序,从而导致调度一个新的用户进程执行
- Kernel: 对称多处理器 SMP — 两个或多个处理器可以同时执行代码
- 在编写内核代码时,你要问自己下面这些问题:
- 这个数据是不是全局的?除了当前线程外,其他线程能不能访问它?
- 这个数据会不会在 进程上下文 和 中断上下文 中共享?它是不是要在两个不同的中断处理程序中共享?
- 进程在访问数据时可不可能被抢占?被调度的新程序会不会访问同一数据?
- 当前进程是不是会休眠(阻塞)在某些资源上,如果是,它会让共享数据处于何种状态?
- 怎样防止数据失控?
- 如果这个函数又在另一个处理器上被调度将会发生什么呢?
- 如何确保代码远离并发威胁呢?
常用的内核同步手段有哪些?简单介绍实现机制
atomic_t 原子操作:由 体系结构 提供的原子操作简单算术指令实现(经典用途:计数器)
spinlock 自旋锁:忙循环 - 旋转 - 等待,自旋锁不应被长时间持有。( rwlock 读写自旋锁 )
由于下半部可以抢占进程上下文中的代码,所以当下半部和进程上下文共享数据时,必须对进程上下文中的共享数据进行保护,所以需要加锁的同时还要 禁止下半部执行 spin_lock_bh().
同样,由于中断处理程序可以抢占下半部,所以如果中断处理程序和下半部共享数据的话,那么就必须在获取恰当的锁的同时还要 禁止中断 spin_lock_irqsave().
semaphone 信号量:基于等待队列实现的睡眠锁,适用于长时间持有的情况。( rwsem 读写信号量 & mutex 互斥信号量)
函数 down_interruptible() 试图获取制定的信号量,如果信号量不可用,将把进程设置为 TASK_INTERRUPTIBLE 状态。而函数 down() 则会让进程在 TASK_UNINTERRUPTIBLE 状态下休眠,此状态无法响应其他信号了。所以 使用 down_interruptible() 比使用 down() 更为普遍(也更正确)
completion 完成变量:用于一个任务发出信号通知另一个任务发生了特定事件,实现思想和信号量一致。
seqlock 顺序锁:基于一个序列计数器实现,经典应用例程 jiffies。
preempt 禁止抢占:
preempt_enable()orpreempt_disable()顺序和屏障:处理多处理器和硬件设备之间的同步问题,确保跨越屏障的读/写不发生重排序,
rmb(), wmb(), mb(), read_barrier_depends()
定时器
内核中的 HZ 代表什么? 赫兹 HZ 代表每秒钟 pre-second 时钟中断发生的次数,也代表定时器精度,是通过静态预处理定义的。
内核中的 jeffies 怎么来的? 全局变量 jeffies 用于记录自系统启动以来产生的节拍的总数
unsigned long volatile jeffies由于 jeffies 在 32-bit 机器上,字节数为 4 byte,存在 溢出后回绕 为 0 的问题。如果用户采用直接比较 jeffies 来判断时序,则有可能导致逻辑错误。因此内核提供了以下四个宏帮助比较节拍计数,正确处理节拍计数回绕问题:
#define time_after(unknow, know) ((long)(know) - (long)(unknow) < 0)
#define time_before(unknow, know) ((long)(unknow) - (long)(know) < 0)
#define time_after_eq(unknow, know) ((long)(unknow) - (long)(know) >= 0)
#define time_before_eq(unknow, know) ((long)(know) - (long)(unknow) >= 0)内核中的 xtime 全局变量用途? xtime 是用来代表 wall time (实际时间),RTC 模块主要在启动时协助初始化 xtime 变量。(xtime 全局变量的同步方式和 jeffies 一样,采用 seqlock 顺序锁同步)
用户空间可以通过
gettimeofday()系统调用来获取 wall time,内核也可以通过do_gettimeofday()来获取。struct timespec { _kernel_time_t tv_sec; /* second */ long tv_nsec; /* ns */ } xtime;可用的延时执行机制?说明简单实现
- jeffies 忙等待:通过对 jeffies 进行判断,加上一定的空闲调度
cond_resched(); - udelay 短延时:依靠执行数次循环达到延时效果,循环次数是根据 BogoMIPS 参数进行比例换算;
- schedule_timeout:结合 timer 和 schedule 实现;
如果任务既要等待一个特定事件到来,又在等待一个特定时间到期,这时可以简单使用
schedule_timeout()代替schedule()+wait_queue;- jeffies 忙等待:通过对 jeffies 进行判断,加上一定的空闲调度
内存管理与地址空间
- 基本术语概念:页、区
- Page 页:内存管理单元 (MMU,管理内存并把虚拟地址转换为物理地址的 硬件) 通常以页为单位进行处理,尽管处理器的 最小可寻址单位 通常是字(Or 字节)。大多数 32 位体系结构支持 4KB 的页,而 64 位体系结构一般会支持 8KB 的页
- Zone 区:由于硬件存在缺陷而引起的内存寻址问题,内核并不能对所有页一视同仁,所以分成四种区:
ZONE_DMA, ZONE_DMA32, ZONE_NORMAL, ZONE_HIGHMEM - 一些硬件只能用于某些特定的内存地址来执行 DMA.
- 一些结构的内存的物理寻址范围比虚拟寻址范围大的多。这样,就有一些内存不能永久地映射到内核空间上
- gfp_mask 分配器标志可分成三类:行为修饰符、区修饰符及类型。
- 行为修饰符:标志内核应该如何分配所需的内存。(__GFP_WAIT 分配器可以休眠)
- 区修饰符:表示内存区应当从何处分配。(默认从 ZONE_NORMAL 分配)
- 类型标志:行为修饰符和区修饰符的指定组合。(GFP_KERNEL 常规分配可能会阻塞, GFP_ATOMIC 用在不能睡眠的上下文中)
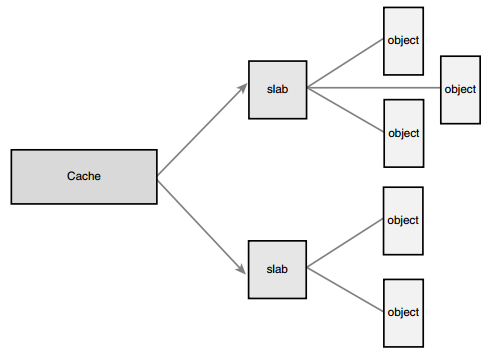
- Slab 分配器(Linux 通用数据结构缓存层)的 设计准则:
- 频繁使用的数据结构也会频繁分配和释放,因此应当缓存它们;
- 频繁分配和回收必然会导致内存碎片,难以找到大块连续的可用内存。为了避免这种现象,应采用空闲链表的来缓存存放;
- 回收的对象可以立即投入下一次分配,因此对于频繁的分配和释放,空闲链表能够提高决策;
- 如果分配器知道对象大小、页大小和总的高速缓存的大小,它会做出更正确的决策;
- 如果让部分缓存专属于单个处理器,那么分配和释放就可以不加 SMP 锁;
- ?如果分配器是与 NUMA 相关的,它就可以从相同的内存节点为请求者进行分配;
- ?对存放的对象进行着色,以防止多个对象映射到相关的高速缓存行 (cache line)
Slab 对象管理模型:基于 动态增长 的高速缓存 cachep,将其分成两级 Slab 与 对象 进行管理。高速缓存以页为单位,划分成为多个 Slab(一般 Slab 暂用一页)。然后 Slab 再以对象大小为单位,管理多个对象的申请与释放。
如何理解:进程栈、内核栈、中断栈三者的关系?以及分别有何种用途? 内核栈和中断栈分别独立占用一个页,其空间全部来至于进程栈。
precpu 每个 CPU 私有化数据资源的好处 : 减少了 SMP 数据锁(需要禁止内核抢占); 大大减少缓存失效;
mem_struct与内核线程? 内核线程没有进程地址空间,也没有相关的内存描述符。所以内核线程对应的进程描述符中 mm 域为空。事实上,这也正是内核线程的真实含义 - 它们没有用户上下文。当一个内核线程被调度时,内核发现它的 mm 域为 NULL,就会保留前一个进程的地址空间,随后内核更新内核线程对应的进程描述符中的 active_mm 域,使其指向前一个进程的内存描述符。因为内核线程不访问用户空间的内存,它们仅仅使用地址空间中和内核内存相关的信息。
虚拟内存域 vm_area_struct 和 内存描述符 mm_struct 的关系? mm_struct 描述整个进程的内存空间对象,vm_area_struct 是对进程内存空间进行区域划分,vm_area_struct 从属于 mm_struct。
- 每个 VMA 对其相关的 mm_struct 结构体来说都是唯一的;所以即使两个独立的进程将同一个文件映射到各自的地址空间,它们分别都会有一个 vm_area_struct 结构体来标志自己的内存区域;
- 同一个进程地址空间内的不同内存区域不能重叠;
- Note: 可用使用
pmap $PID来查看对应进程的虚拟内存域组织情况;
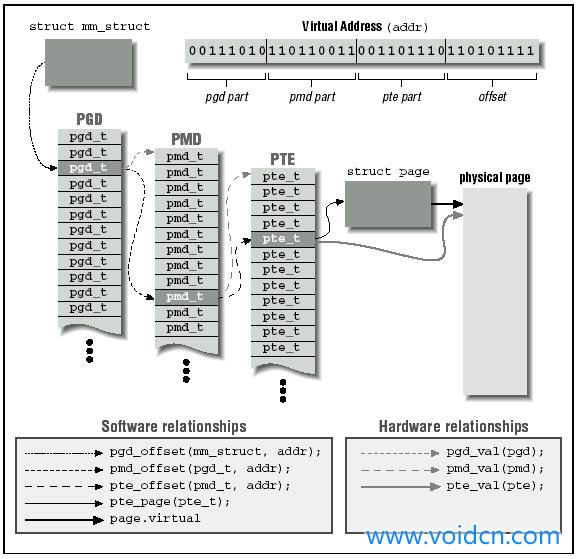
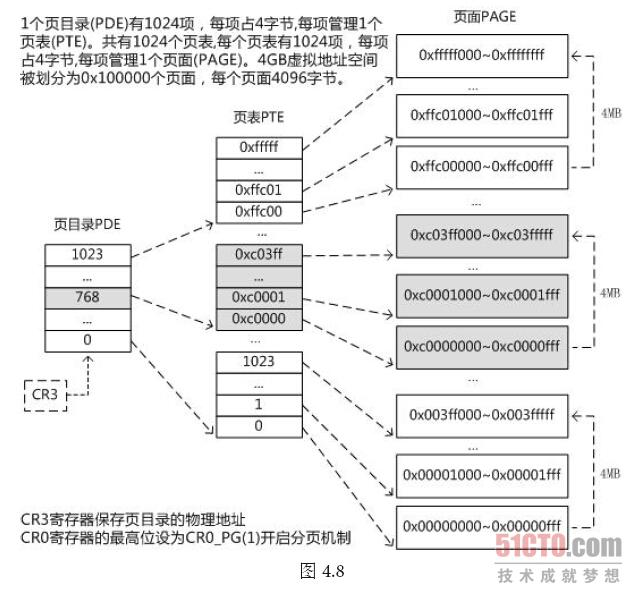
页表:虽然应用程序操作的对象是映射到物理内存之上的虚拟内存,但是处理器直接操作的确实物理内存。所以当应用程序访问一个虚拟地址时,首先必须将虚拟地址转化为物理地址,然胡处理器才能解析地址访问的请求,而地址转化的过程就是页表查询的过程。
地址转化需要将虚拟地址分段,使每段虚拟地址都作为一个索引指向页表,而页表项则指向下一级别的页表或者指向最终的物理页面。Linux 采用三级页表完成地址转化,三级页表名称分别为:
PGD,PMD,PTE。
- TLB 翻译后缓冲器:由于几乎每次对虚拟内存中的页面访问都必须先解析它,从而得到物理内存中的对应地址,所以页表操作的性能非常关键。TLB 是一个将虚拟地址映射到物理地址的硬件缓存,当请求访问一个虚拟地址时,处理器将首先检查 TLB 中是否缓存了改虚拟地址到物理地址的映射,如果缓存命中,就不需要通过页表搜索对应的物理地址了。