简介:
芯片内部具有可编程日历时钟和31个字节的静态RAM,日历时钟可自动进行闰年补偿,计时准确,接口简单,使用方便,工作电压范围宽,功耗低,芯片自身还具有对备份电池进行涓流充电功能,可以有效地延长备份电池的使用寿命。
连接图:8051单片机与DS1302的一种接口电路
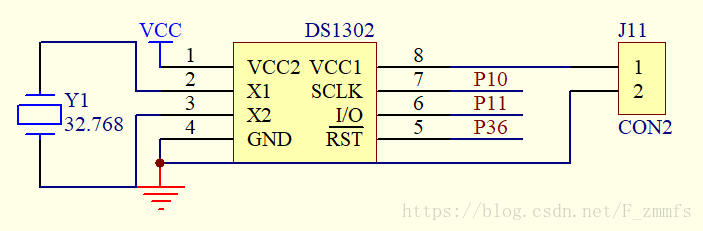
- 单片机与DS1302之间采用3线串行通信方式
- RST为通信允许信号,RST=1允许通信,RST=0禁止通信。
- IO为双向串行数据传送信号,SCLK为串行数据的位同步脉冲信号。
- 8051作为主机通过控制RST、SCLK和IO信号实现两芯片之间的数据传送。
- DS1302芯片的X1和X2端外接32.768KHz的石英晶振
- Vcc1和Vcc2是电源引脚,单电源供电时接Vcc1脚,双电源供电时主电源接Vcc2,备份电池接Vcc1。(如果采用可充电镉镍电池,可启用内部涓流充电器在主电源正常时向电池充电,以延长电池使用时间。备份电池也可用1微法以上的超容量电容代替,需要注意备份电池电压应略低于主电源工作电压。)
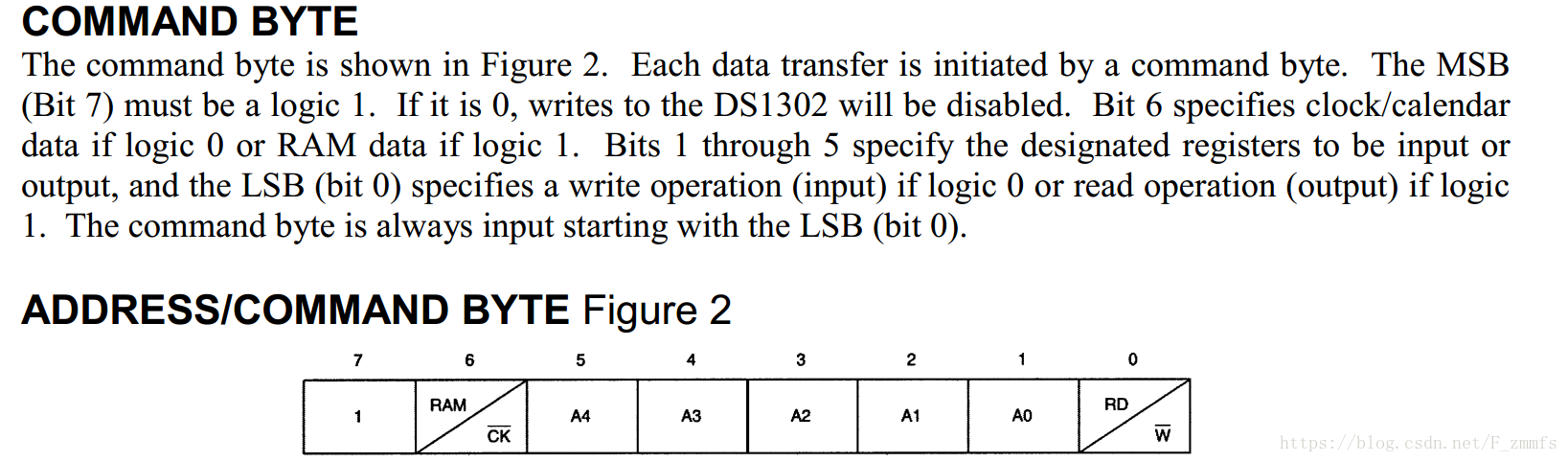
每个传输需要命令字节初始化
7:必须是1;0不允许写
6:判断对时钟操作还是对rom操作
1-5:判断内部寄存器
0:输入输出
传输时候最低位在前
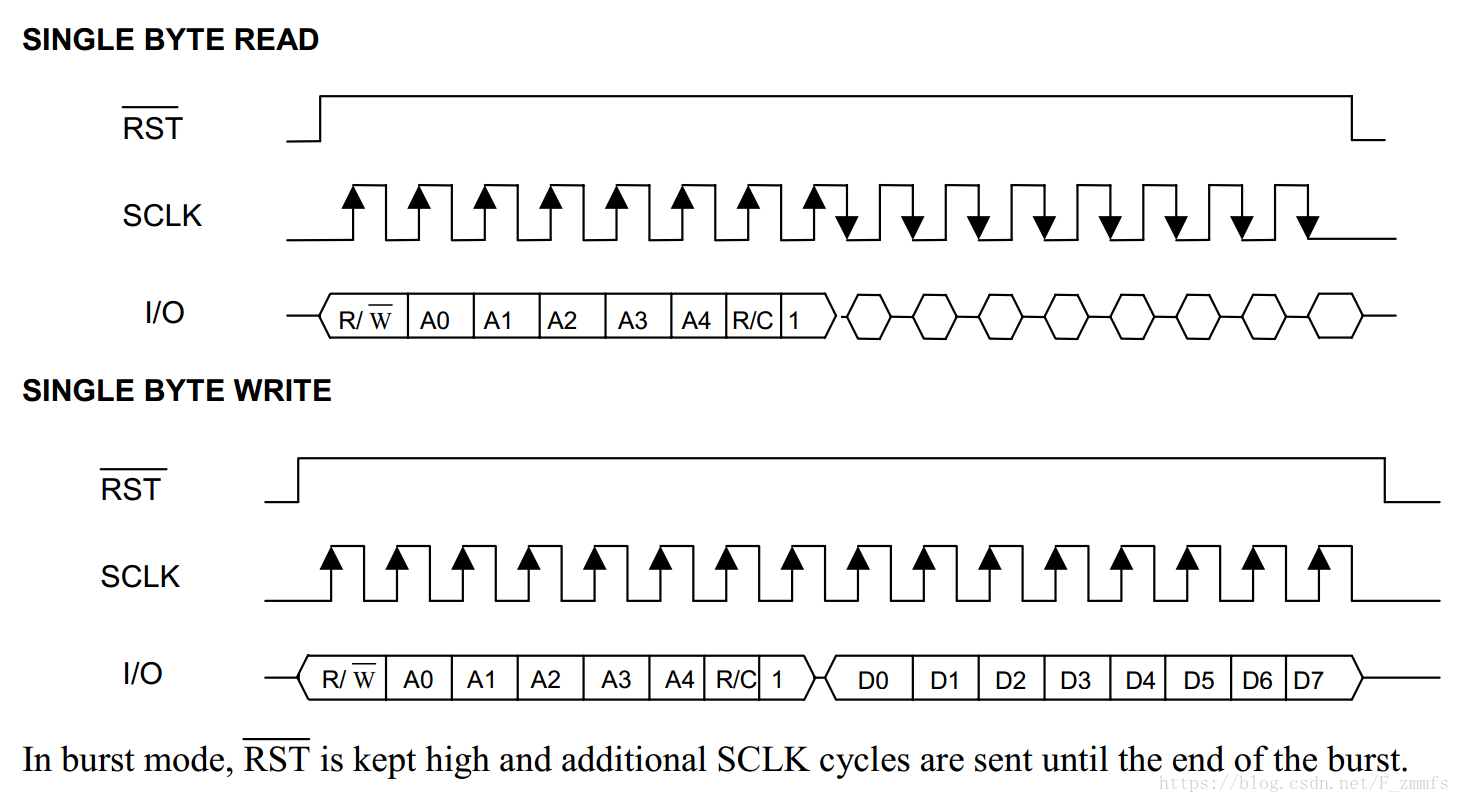
时序图:
#include<reg52.h>
#include <intrins.h>
#define uchar unsigned char
#define uint unsigned int
//时钟
sbit sck=P1^0;
sbit io=P1^1;
sbit rst=P3^6;
// 数码管防误操作
sbit smgen=P2^3;
unsigned char code smg_du[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71,0x00,0x10};
unsigned char code smg_we[]={0x08,0x18,0x28,0x38,0x48,0x58,0x68,0x78};
uchar time_data[7]={10,6,4,17,11,58,30}; //年周月日时分秒
uchar write_add[7]={0x8c,0x8a,0x88,0x86,0x84,0x82,0x80};
uchar read_add[7]={0x8d,0x8b,0x89,0x87,0x85,0x83,0x81};
uchar disp[8];
//单字节写
void write_ds1302_byte(uchar dat);
//add +data
void write_ds1302(uchar add,uchar dat);
//单字节读
uchar read_ds1302(uchar add);
// 设置
void set_rtc(void);
// 读时间
void read_rtc(void);
// 数据处理与时间显示
void time_pros(void);
void display(void);
void delay_50us(uint t)
{
uchar j;
for(;t>0;t--)
for(j=19;j>0;j--);
}
void write_ds1302_byte(uchar dat)
{
//rst在调用之前已经拉高
uchar i;
for(i=0;i<8;i++)
{
//sclk置为低电平
sck=0;
// 低位先传输
io=dat&0x01;
dat=dat>>1;
sck=1;
}
}
void write_ds1302(uchar add,uchar dat)
{
// init
rst=0;
_nop_();
sck=0;
_nop_();
// write
rst=1;
_nop_();
write_ds1302_byte(add);
write_ds1302_byte(dat);
rst=0;
_nop_();
io=1;
sck=1;
}
uchar read_ds1302(uchar add)
{
uchar i,value;
rst=0;
_nop_();
sck=0;
_nop_();
rst=1;
_nop_();
write_ds1302_byte(add);
for(i=0;i<8;i++)
{
value=value>>1;
sck=0;
if(io)
value=value|0x80;//10000000
sck=1;
}
rst=0;
_nop_();
sck=0;
_nop_();
sck=1;
io=1;
return value;
}
void set_rtc(void)
{
// 对时 BCD码
uchar i,j;
//处理bcd码
for(i=0;i<7;i++)
{
j=time_data[i]/10;
time_data[i]=time_data[i]%10;
time_data[i]=time_data[i]+j*16;
}
write_ds1302(0x8e,0x00); //去除写保护
for(i=0;i<7;i++)
{
write_ds1302(write_add[i],time_data[i]);
}
write_ds1302(0x8e,0x80); //加写保护
}
void read_rtc(void)
{
uchar i;
for(i=0;i<7;i++)
{
time_data[i]=read_ds1302(read_add[i]);
}
}
void time_pros(void)
{
disp[0]=time_data[6]%16;
disp[1]=time_data[6]/16;
disp[2]=16;
disp[3]=time_data[5]%16;
disp[4]=time_data[5]/16;
disp[5]=16;
disp[6]=time_data[4]%16;
disp[7]=time_data[4]/16;
}
void display(void)
{
uchar i;
for(i=0;i<8;i++)
{
P1=smg_du[disp[i]];
P2=smg_we[i];
delay_50us(20);
}
}
void main(void)
{
// set_rtc();//自动对时
while(1)
{
smgen=0;
read_rtc();
smgen=1;
time_pros();
display();
}
}