简介
惯性导航系统(IMUs) 尤其是MEMS 惯性导航系统(微机电惯性导航系统),比如在手机里的。有如下特点
- 便宜
- 体积小
- 精度差,这里的精度不仅仅指的是噪声大,还有其他误差来源,比如跨轴误差,scf误差等,这些误差基本不随时间变化而变化从而使校准称为可能
经过简单"粗"校准(不需要专业的惯导测试设备)后,MEMS IMU的精度会得到大大提升,在现实批量生产应用中有着很大意义。
传感器的误差
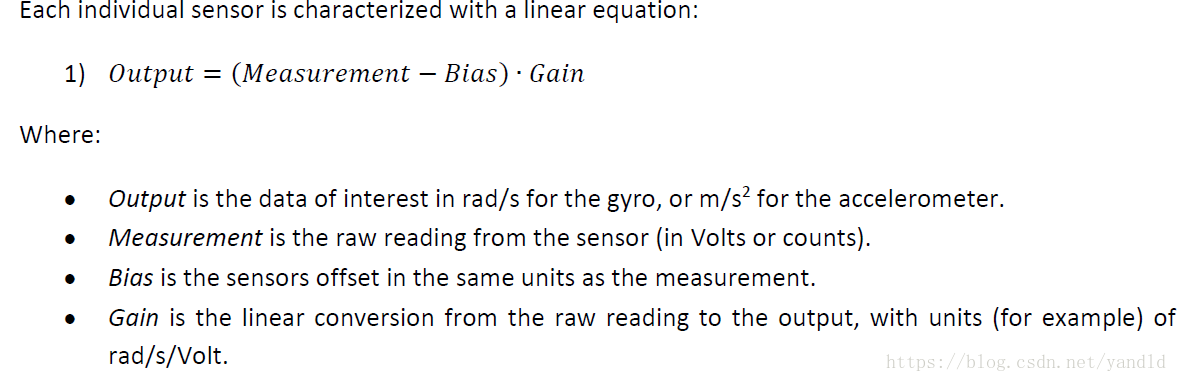
单个(单轴)传感器:
对于MEMS传感器,一个简化的误差模型是:
多传感器之间的误差
多个传感器(一般的MEMS传感器很多都是三轴传感器,相当于三个单轴传感器互相叠放在一起,形成一颗芯片)放在一起叫做一个triad. 理想情况下,每个传感器轴都应该是互相正交。但是实际情况并不总是完美。
比如想象一下,X轴与Y轴形成了α°的误差 ,X轴与Z轴形成了β°的误差,那么X轴的实际测量值是:
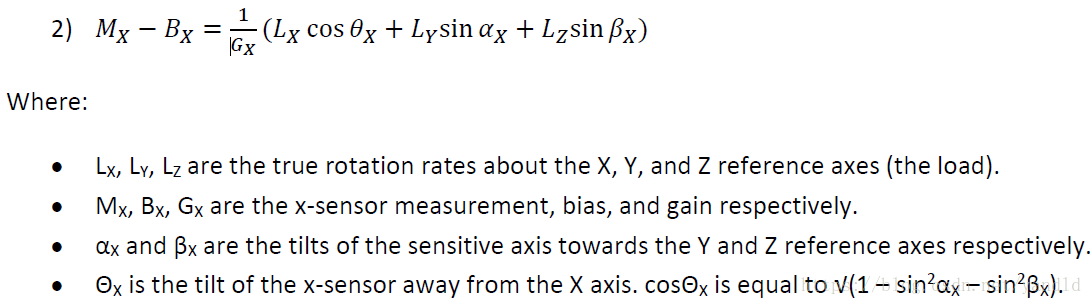
换一种写法, 形成矩阵C:(load vector 的意思是 标准值,已知的一个加载值,用于校准传感器)

最终校准

A被称为增益矩阵,这个矩阵就是最终要求出的校准矩阵,这个矩阵包含了单个传感器的增益误差,和traid之间的互相耦合误差以及非正交误差。我们的最终目的,就是求出 校准矩阵A 和 零偏B

陀螺仪校准
任何校准中最重要的概念是要 加载已知大小的测试载荷!
对于陀螺仪,需要绕三个轴分别旋转一定角度并记录 陀螺仪的读出值,在没有专业设备的情况下。最简单的房子就是整一个正方体盒子。把陀螺仪放中间,然后利用正方体则比较方便的绕XYZ 分别旋转。
- 90° about body X (rotation 1)
- 90°radians about body Y (rotation 2)
- 90° radians about body Z (rotation 3)
再旋转之前(或者之后) 最好先静置陀螺仪来求出 零偏B。在每次旋转中,旋转的角度出来的角度R 可以由传感器读值积分得到:

还记得 这个校准公式没?
此时:
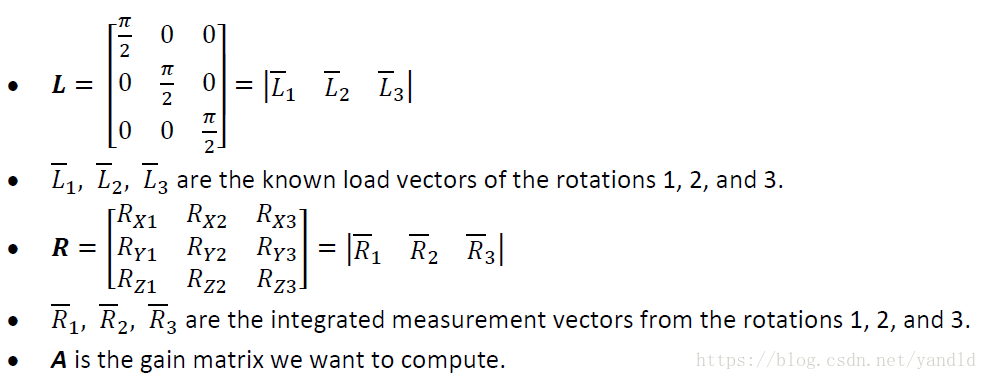
这样有了L和 R ,A直接来一把矩阵求逆就可以算出来了:
加速度校准
加速度校准甚至比陀螺的校准还简单,因为可以把重力当做一个非常靠谱的已知大小的校准载荷。
首先让我们先解决零偏问题,在陀螺仪中,因为没有天然的有效载荷,零偏可以通过静置很容易求出。而加速度计,只要静止就会受到(只受到)重力影响,这样我们可以靠求正副两个方向重力读值然后加一起/2 得到:

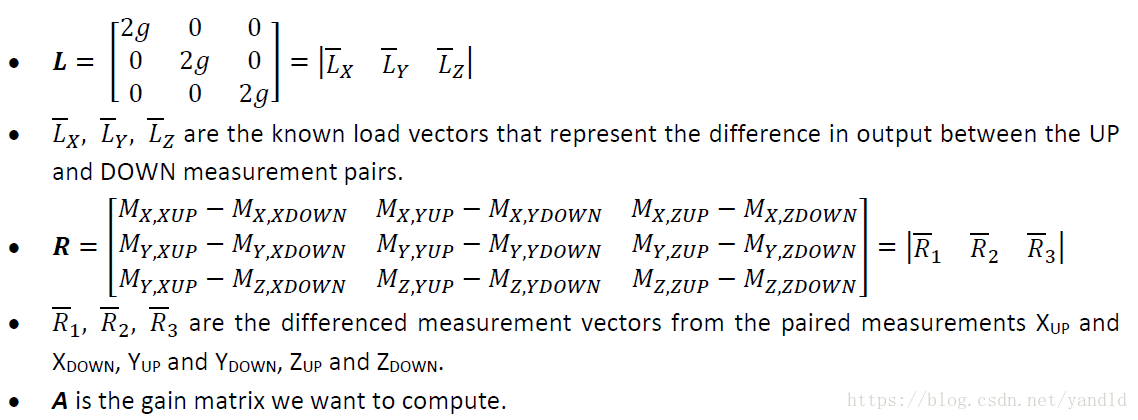
我们进行如下测量
- 测量X轴朝上,朝下的读数值(XUP XDOWN)
- 测量Y轴朝上,朝下的读数值(YUP YDOWN)
- 测量Z轴朝上,朝下的读数值(ZUP ZDOWN)
然后还是应用 大法求出A