Introduction
当宇航员在其他行星表面进行EVA任务时,他们通常需要与某些代理商或某些系统合作,以顺利而有效地完成任务。降低船员工作量是一个主要的问题,特别是在EVA期间。机器人的自主性可以使机器人独立完成一些任务,使机器人能够轻松完成某些任务。在空间探索中使用的机器人总是具有很高的自主权(LOA)。然而,在目前的实践中,人机操作系统在任务完成的系统中。自主系统在建模互动的丰富性和平衡各种各样的成员之间的权衡和平衡之间的权衡方面还没有像人类一样有效。因此,从高层次的命令和详细的活动顺序,然后直接传送到远程传送的宇航员,预期的情况。这在通信,人机交互界面和人类可理解的表现方面带来了重大挑战。
对于人力资源管理问题,用户和计算机系统之间的智能化和自动化界面发展相当大,HRI已经跨越式发展[1-6]。现在有很多成熟的HRI方法;在这些方式中,语音识别和手势识别是发展方向。语音识别系统正在朝着两个重要方向发展:一维电子词汇连续语音识别系统,另一个是小型化,便携式音频产品的应用。大量的词汇和连续的语音识别系统通常以人为本.PCSI的识别处理芯片通常在计算速度和容量方面存在局限性。在行业层面上,这些限制表明,在这一领域应用语音识别还有很长的路要走。手语是一种以人为本的语言,表达丰富的语言,也引起了人们的关注。手势识别是HRI应用中经常使用的技术,手势识别有许多方法,例如基于图像识别,曲率和表面肌电图(EMG)信号的方法。
本文提出了一种利用宇航员手势干预agent自主权的方式。 宇航员与agent合作完成任务的例子如图1所示。尽管最近的图像处理技术已经取得了令人着迷的发展[2],但它们不适合于空间应用,因为笨拙的衣服可能带来一些最困难的问题 在机器视觉领域[7]。 对于表面EMG信号,太空服中存在较大的间隙,而宇航服内的大气压仅为标准气氛的40%,所以在这种情况下EMG信号是否改变是未知的。
越来越多的工业和服务机器人[8,9]专注于设计HRI技术,以提高机器人的效率和效能。 HRI是指在任务描述中传达操作者的意图和解释机器人动作顺序和工作要求的过程。 通过应用适当的交互方法和接口,HRI的补充已成为机器人行业的重要因素和挑战。 机器人的最新发展引入了触觉交互,用户可以通过它们感受到两者虚拟和真实的环境,如远程运行和远程运行[10]。 已有许多工作为HRI提供技术和理论支持,以提高效率和适用性。 现在常用的方法包括多模式交互,教学模式,虚拟现实和增强现实。
如今,空间活动仍处于初级阶段,技术需要进一步改进。在不久的将来,随着航空航天技术的发展,宇航员不会局限于技术人员;其他人,如工程师,物理学家,生物学家,外科医生甚至哲学家,也有机会成为宇航员在太空探索中进行相关科学实验。因此,与宇航员合作的个人代理或多代理系统需要更高的LOA和友好的HRI。使HRI更有效,高效和自然对于持续的空间探索的成功至关重要。特别是我们假设人类和机器人必须能够(1)清楚地了解他们的目标,能力,计划和成就; (2)合作解决问题,特别是当情况超过自主能力时;和(3)通过本地和远程的多种模式(对话,手势等)进行交互。为了实现这些目标,必须解决一些HRI挑战。
使用手势传达信息已成为人机交互的重要组成部分[4-7]。手势识别被广泛用于许多应用中,例如电脑游戏,机械控制(例如起重机)和家用电器遥控器。手势分析可以分为三种主要方法,即基于手套的方法,基于视觉的方法和绘制手势的方法[5]。对于基于手套数据的方法,手指的相对位置由附加的传感器捕获,附加传感器通常是连接到手套的磁性或声学传感器。通常提供查找表软件工具包,用于手势识别[7]。第二种方法是基于图像处理,图像背景更加严格,因此不适合复杂工作环境中的应用[6]。第三种方法涉及到姿态图的分析[5],使用触控笔作为输入设备。该方法经常用于识别具有可靠性,准确度和电磁干扰噪声问题的书面字。本文的结构如下。在第2节中,详细介绍了交互式宇航员 - 机器人系统,包括系统设备,总体规划和主要功能以及蛇形机器人。在第3节中,我们介绍了SVM和PSO在手势识别中的应用。在第4节中,我们设计了两个实验来验证所提出的系统的可靠性和鲁棒性。第5节讨论了结论和未来工作.
交互式Astronaut-Robot系统
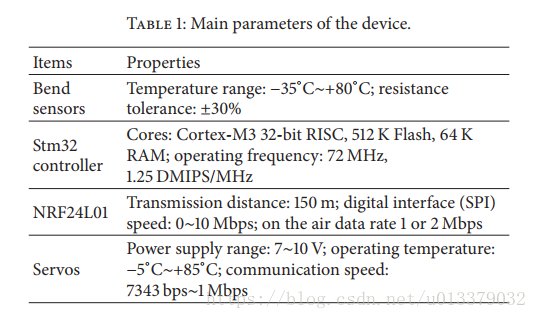
该系统将弯曲传感器集成在手套中以捕获所有手指的弯曲角度。 然后通过由SVM训练的模型对手指角度进行分类,生成的相应指令控制蛇形机器人,使蛇形机器人可以协助宇航员完成任务。主要部件包括弯曲传感器系统,STM32控制器 ,无线通信模块,以及由伺服器组成的模块化蛇形机器人。 各设备的主要参数如表1所示。
2.1控制系统
该控制系统的主要功能是根据手势识别系统的指示,实现模块化机器人按计划运动的移动。 详细实现如图2所示。控制器从安装在手套上的弯曲传感器获取信号Fs后,信号经过滤波器和归一化预处理阶段,O