本文主要介绍几种常见的CNN经典模型
LeNet5
LeNet5 诞生于 1994 年,是最早的卷积神经网络之一,并且推动了深度学习领域的发展。自从 1988 年开始,在许多次成功的迭代后,这项由 Yann LeCun 完成的开拓性成果被命名为 LeNet5(参见:Gradient-Based Learning Applied to Document Recognition)。
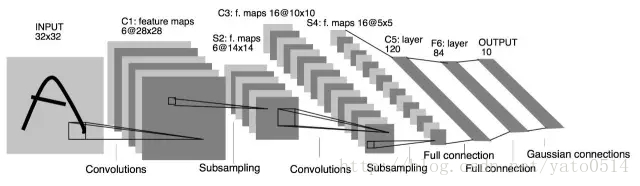
LeNet5 的架构基于这样的观点:(尤其是)图像的特征分布在整张图像上,以及带有可学习参数的卷积是一种用少量参数在多个位置上提取相似特征的有效方式。在那时候,没有 GPU 帮助训练,甚至 CPU 的速度也很慢。因此,能够保存参数以及计算过程是一个关键进展。这和将每个像素用作一个大型多层神经网络的单独输入相反。LeNet5 阐述了那些像素不应该被使用在第一层,因为图像具有很强的空间相关性,而使用图像中独立的像素作为不同的输入特征则利用不到这些相关性。
LeNet5特征能够总结为如下几点:
1)卷积神经网络使用三个层作为一个系列: 卷积,池化,非线性
2) 使用卷积提取空间特征
3)使用映射到空间均值下采样(subsample)
4)双曲线(tanh)或S型(sigmoid)形式的非线性
5)多层神经网络(MLP)作为最后的分类器
6)层与层之间的稀疏连接矩阵避免大的计算成本
总体看来,这个网络是最近大量神经网络架构的起点,并且也给这个领域带来了许多灵感。
从 1998 年到 2010 年神经网络处于孵化阶段。大多数人没有意识到它们不断增长的力量,与此同时其他研究者则进展缓慢。由于手机相机以及便宜的数字相机的出现,越来越多的数据可被利用。并且计算能力也在成长,CPU 变得更快,GPU 变成了多种用途的计算工具。这些趋势使得神经网络有所进展,虽然速度很慢。数据和计算能力使得神经网络能完成的任务越来越有趣。之后一切变得清晰起来……
Dan Ciresan Net
2010 年的时候,Dan Claudiu Ciresan 和 Jurgen Schmidhuber 发布了最早的 GPU 神经网络的一个实现。这个实现是在一块 NVIDIA GTX 280 图形处理器上运行 9 层的神经网络,包含前向与反向传播。
AlexNet
2012年,Hinton的学生Alex Krizhevsky提出了深度卷积神经网络模型AlexNet,它可以算是LeNet的一种更深更宽的版本。AlexNet中包含了几个比较新的技术点,也首次在CNN中成功应用了ReLU、Dropout和LRN等Trick。同时AlexNet也使用了GPU进行运算加速,作者开源了他们在GPU上训练卷积神经网络的CUDA代码。AlexNet包含了6亿3000万个连接,6000万个参数和65万个神经元,拥有5个卷积层,其中3个卷积层后面连接了最大池化层,最后还有3个全连接层。AlexNet以显著的优势赢得了竞争激烈的ILSVRC 2012比赛,top-5的错误率降低至了16.4%,相比第二名的成绩26.2%错误率有了巨大的提升。AlexNet可以说是神经网络在低谷期后的第一次发声,确立了深度学习(深度卷积网络)在计算机视觉的统治地位,同时也推动了深度学习在语音识别、自然语言处理、强化学习等领域的拓展。
AlexNet将LeNet的思想发扬光大,把CNN的基本原理应用到了很深很宽的网络中。AlexNet主要使用到的新技术点如下。
(1)成功使用ReLU作为CNN的激活函数,并验证其效果在较深的网络超过了Sigmoid,成功解决了Sigmoid在网络较深时的梯度弥散问题。虽然ReLU激活函数在很久之前就被提出了,但是直到AlexNet的出现才将其发扬光大。
(2)训练时使用Dropout随机忽略一部分神经元,以避免模型过拟合。Dropout虽有单独的论文论述,但是AlexNet将其实用化,通过实践证实了它的效果。在AlexNet中主要是最后几个全连接层使用了Dropout。
(3)在CNN中使用重叠的最大池化。此前CNN中普遍使用平均池化,AlexNet全部使用最大池化,避免平均池化的模糊化效果。并且AlexNet中提出让步长比池化核的尺寸小,这样池化层的输出之间会有重叠和覆盖,提升了特征的丰富性。
(4)提出了LRN层,对局部神经元的活动创建竞争机制,使得其中响应比较大的值变得相对更大,并抑制其他反馈较小的神经元,增强了模型的泛化能力。
(5)使用CUDA加速深度卷积网络的训练,利用GPU强大的并行计算能力,处理神经网络训练时大量的矩阵运算。AlexNet使用了两块GTX 580 GPU进行训练,单个GTX 580只有3GB显存,这限制了可训练的网络的最大规模。因此作者将AlexNet分布在两个GPU上,在每个GPU的显存中储存一半的神经元的参数。因为GPU之间通信方便,可以互相访问显存,而不需要通过主机内存,所以同时使用多块GPU也是非常高效的。同时,AlexNet的设计让GPU之间的通信只在网络的某些层进行,控制了通信的性能损耗。
(6)数据增强,随机地从256´256的原始图像中截取224´224大小的区域(以及水平翻转的镜像),相当于增加了(256-224)2´2=2048倍的数据量。如果没有数据增强,仅靠原始的数据量,参数众多的CNN会陷入过拟合中,使用了数据增强后可以大大减轻过拟合,提升泛化能力。进行预测时,则是取图片的四个角加中间共5个位置,并进行左右翻转,一共获得10张图片,对他们进行预测并对10次结果求均值。同时,AlexNet论文中提到了会对图像的RGB数据进行PCA处理,并对主成分做一个标准差为0.1的高斯扰动,增加一些噪声,这个Trick可以让错误率再下降1%。
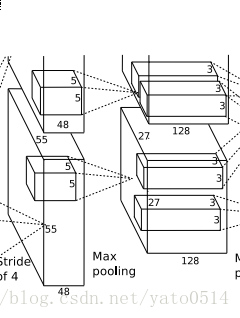
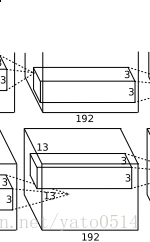
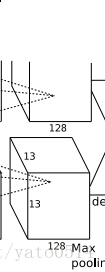
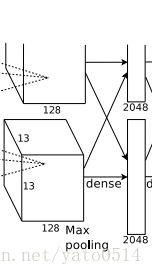
整个AlexNet有8个需要训练参数的层(不包括池化层和LRN层),前5层为卷积层,后3层为全连接层,如图4所示。AlexNet最后一层是有1000类输出的Softmax层用作分类。 LRN层出现在第1个及第2个卷积层后,而最大池化层出现在两个LRN层及最后一个卷积层后。ReLU激活函数则应用在这8层每一层的后面。因为AlexNet训练时使用了两块GPU,因此这个结构图中不少组件都被拆为了两部分。现在我们GPU的显存可以放下全部模型参数,因此只考虑一块GPU的情况即可。
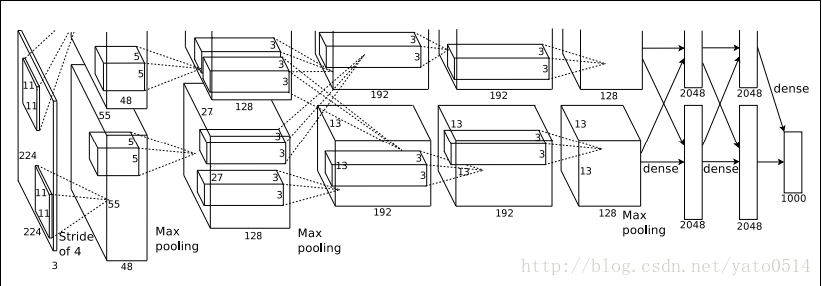
AlexNet每层的超参数如图5所示。其中输入的图片尺寸为224´224,实际上会经过预处理变为227*227*3。第一个卷积层使用了较大的卷积核尺寸11´11,步长为4,有96个卷积核;图上之所以看起来是48个是由于采用了2个GPU服务器处理,每一个服务器上承担了48个。
【img_size - filter_size】/stride +1 = new_feture_size,所以这里我们得到的特征图大小为:
([227-11] / 4 + 1 )= 55 注意【】表示向下取整. 我们得到的新的特征图规格为55*55,注意这里提取到的特征图是彩色的.这样得到了96个55*55大小的特征图了,并且是RGB通道的.
紧接着一个LRN层;
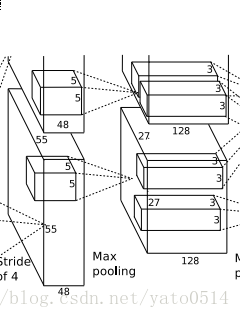
然后是一个3´3的最大池化层,步长为2。这之后的卷积核尺寸都比较小,都是5´5或者3´3的大小,并且步长都为1,即会扫描全图所有像素;而最大池化层依然保持为3´3,并且步长为2。
我们可以发现一个比较有意思的现象,在前几个卷积层,虽然计算量很大,但参数量很小,都在1M左右甚至更小,只占AlexNet总参数量的很小一部分。这就是卷积层有用的地方,可以通过较小的参数量提取有效的特征。而如果前几层直接使用全连接层,那么参数量和计算量将成为天文数字。虽然每一个卷积层占整个网络的参数量的1%都不到,但是如果去掉任何一个卷积层,都会使网络的分类性能大幅地下降。
conv2和conv1不同,conv2中使用256个5*5大小的过滤器filter对96*27*27个特征图,进行进一步提取特征,但是处理的方式和conv1不同,过滤器是对96个特征图中的某几个特征图中相应的区域乘以相应的权重,然后加上偏置之后所得到区域进行卷积,比如过滤器中的一个点X11 ,如X11*new_X11,需要和96个特征图中的1,2,7特征图中的X11,new_X11 =1_X_11*1_W_11+2_X_11*2_W_11+7_X_11*7_W_11+Bias,经过这样卷积之后,然后在在加上宽度高度两边都填充2像素,会的到一个新的256个特征图.特征图的大小为:
(【27+2*2 - 5】/1 +1) = 27 ,也就是会有256个27*27大小的特征图.
然后进行ReLU操作.
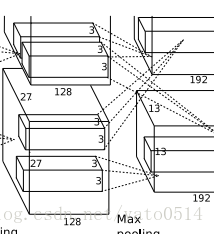
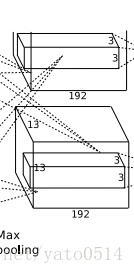
conv3没有使用下采样
conv4没有使用下采样
得到256个13*13个特征图.
降采样层pool,防止过拟合得到: 256个 (【13 - 3】/2 +1)=6 6*6大小的特征图.
描述一下: 这里使用4096个神经元,对256个大小为6*6特征图,进行一个全链接,也就是将6*6大小的特征图,进行卷积变为一个特征点,然后对于4096个神经元中的一个点,是由256个特征图中某些个特征图卷积之后得到的特征点乘以相应的权重之后,再加上一个偏置得到.
再进行一个dropout随机从4096个节点中丢掉一些节点信息(也就是值清0),然后就得到新的4096个神经元.
fc7全连接层:
和fc6类似.
fc8链接层:
采用的是1000个神经元,然后对fc7中4096个神经元进行全链接,然后会通过高斯过滤器,得到1000个float型的值,也就是我们所看到的预测的可能性,
如果是训练模型的话,会通过标签label进行对比误差,然后求解出残差,再通过链式求导法则,将残差通过求解偏导数逐步向上传递,并将权重进行推倒更改,类似与BP网络思虑,然后会逐层逐层的调整权重以及偏置.
Overfeat
2013 年的 12 月,纽约大学的 Yann LeCun 实验室提出了 AlexNet 的衍生——Overfeat(参见:OverFeat: Integrated Recognition, Localization and Detection using Convolutional Networks)。这篇文章也提出了学习边界框(learning bounding box),并导致之后出现了很多研究这同一主题的论文。我相信学习分割对象比学习人工边界框更好。
VGG
来自牛津大学的 VGG 网络(参见:Very Deep Convolutional Networks for Large-Scale Image Recognition)是第一个在各个卷积层使用更小的 3×3 过滤器(filter),并把它们组合作为一个卷积序列进行处理的网络。
这看来和 LeNet 的原理相反,其中是大的卷积被用来获取一张图像中相似特征。和 AlexNet 的 9×9 或 11×11 过滤器不同,过滤器开始变得更小,离 LeNet 竭力所要避免的臭名昭著的 1×1 卷积异常接近——至少在该网络的第一层是这样。但是 VGG 巨大的进展是通过依次采用多个 3×3 卷积,能够模仿出更大的感受野(receptive field)的效果,例如 5×5 与 7×7。这些思想也被用在了最近更多的网络架构中,如 Inception 与 ResNet。
VGG 网络使用多个 3×3 卷积层去表征复杂特征。注意 VGG-E 的第 3、4、5 块(block):256×256 和 512×512 个 3×3 过滤器被依次使用多次以提取更多复杂特征以及这些特征的组合。其效果就等于是一个带有 3 个卷积层的大型的 512×512 大分类器。这显然意味着有大量的参数与学习能力。但是这些网络训练很困难,必须划分到较小的网络,并逐层累加。这是因为缺少强大的方式对模型进行正则化,或者或多或少约束大量由于大量参数增长的搜索空间。
VGG 在许多层中都使用大特征尺寸,因为推断(inference)在运行时是相当耗费时间的。正如 Inception 的瓶颈(bottleneck)那样,减少特征的数量将节省一些计算成本。
VGGNet是牛津大学计算机视觉组(Visual Geometry Group)和Google DeepMind公司的研究员一起研发的的深度卷积神经网络。VGGNet探索了卷积神经网络的深度与其性能之间的关系,通过反复堆叠3´3的小型卷积核和2´2的最大池化层,VGGNet成功地构筑了16~19层深的卷积神经网络。VGGNet相比之前state-of-the-art的网络结构,错误率大幅下降,并取得了ILSVRC 2014比赛分类项目的第2名和定位项目的第1名。同时VGGNet的拓展性很强,迁移到其他图片数据上的泛化性非常好。VGGNet的结构非常简洁,整个网络都使用了同样大小的卷积核尺寸(3´3)和最大池化尺寸(2´2)。到目前为止,VGGNet依然经常被用来提取图像特征。VGGNet训练后的模型参数在其官方网站上开源了,可用来在domain specific的图像分类任务上进行再训练(相当于提供了非常好的初始化权重),因此被用在了很多地方。
VGGNet论文中全部使用了3´3的卷积核和2´2的池化核,通过不断加深网络结构来提升性能。图6所示为VGGNet各级别的网络结构图,图7所示为每一级别的参数量,从11层的网络一直到19层的网络都有详尽的性能测试。虽然从A到E每一级网络逐渐变深,但是网络的参数量并没有增长很多,这是因为参数量主要都消耗在最后3个全连接层。前面的卷积部分虽然很深,但是消耗的参数量不大,不过训练比较耗时的部分依然是卷积,因其计算量比较大。这其中的D、E也就是我们常说的VGGNet-16和VGGNet-19。C很有意思,相比B多了几个1´1的卷积层,1´1卷积的意义主要在于线性变换,而输入通道数和输出通道数不变,没有发生降维。
VGGNet拥有5段卷积,每一段内有2~3个卷积层,同时每段尾部会连接一个最大池化层用来缩小图片尺寸。每段内的卷积核数量一样,越靠后的段的卷积核数量越多:64 – 128 – 256 – 512 – 512。其中经常出现多个完全一样的3´3的卷积层堆叠在一起的情况,这其实是非常有用的设计。如图8所示,两个3´3的卷积层串联相当于1个5´5的卷积层,即一个像素会跟周围5´5的像素产生关联,可以说感受野大小为5´5。而3个3´3的卷积层串联的效果则相当于1个7´7的卷积层。除此之外,3个串联的3´3的卷积层,拥有比1个7´7的卷积层更少的参数量,只有后者的。最重要的是,3个3´3的卷积层拥有比1个7´7的卷积层更多的非线性变换(前者可以使用三次ReLU激活函数,而后者只有一次),使得CNN对特征的学习能力更强。
VGGNet在训练时有一个小技巧,先训练级别A的简单网络,再复用A网络的权重来初始化后面的几个复杂模型,这样训练收敛的速度更快。在预测时,VGG采用Multi-Scale的方法,将图像scale到一个尺寸Q,并将图片输入卷积网络计算。然后在最后一个卷积层使用滑窗的方式进行分类预测,将不同窗口的分类结果平均,再将不同尺寸Q的结果平均得到最后结果,这样可提高图片数据的利用率并提升预测准确率。同时在训练中,VGGNet还使用了Multi-Scale的方法做数据增强,将原始图像缩放到不同尺寸S,然后再随机裁切224´224的图片,这样能增加很多数据量,对于防止模型过拟合有很不错的效果。实践中,作者令S在[256,512]这个区间内取值,使用Multi-Scale获得多个版本的数据,并将多个版本的数据合在一起进行训练。图9所示为VGGNet使用Multi-Scale训练时得到的结果,可以看到D和E都可以达到7.5%的错误率。最终提交到ILSVRC 2014的版本是仅使用Single-Scale的6个不同等级的网络与Multi-Scale的D网络的融合,达到了7.3%的错误率。不过比赛结束后作者发现只融合Multi-Scale的D和E可以达到更好的效果,错误率达到7.0%,再使用其他优化策略最终错误率可达到6.8%左右,非常接近同年的冠军Google Inceptin Net。同时,作者在对比各级网络时总结出了以下几个观点。
1)LRN层作用不大。
(2)越深的网络效果越好。
(3)1´1的卷积也是很有效的,但是没有3´3的卷积好,大一些的卷积核可以学习更大的空间特征。
网络中的网络(Network-in-network)
网络中的网络(NiN,参见论文:Network In Network)的思路简单又伟大:使用 1×1 卷积为卷积层的特征提供更组合性的能力。
NiN 架构在各个卷积之后使用空间 MLP 层,以便更好地在其他层之前组合特征。同样,你可以认为 1×1 卷积与 LeNet 最初的原理相悖,但事实上它们可以以一种更好的方式组合卷积特征,而这是不可能通过简单堆叠更多的卷积特征做到的。这和使用原始像素作为下一层输入是有区别的。其中 1×1 卷积常常被用于在卷积之后的特征映射上对特征进行空间组合,所以它们实际上可以使用非常少的参数,并在这些特征的所有像素上共享!
MLP 的能力能通过将卷积特征组合进更复杂的组(group)来极大地增加单个卷积特征的有效性。这个想法之后被用到一些最近的架构中,例如 ResNet、Inception 及其衍生技术。
NiN 也使用了平均池化层作为最后分类器的一部分(这里作者说的有异议,全连接层替换成平均池化层,NIN提出的),这是另一种将会变得常见的实践。这是通过在分类之前对网络对多个输入图像的响应进行平均完成的。
参考原文:http://blog.csdn.net/app_12062011/article/details/62886113