转载自:https://blog.csdn.net/huang1024rui/article/details/69568991
上一讲中,我们知道了投影矩阵
P=A(ATA)−1AT
,
Pb
将会把向量投影在A的列空间中。即只要知道矩阵
A
的列空间,就能得到投影矩阵
P
。
1.投影矩阵(Ax=b无解的情形)
1.1两个极端的例子:
1) 如果
b∈C(A)
,则
Pb=b
;
2) 如果
b⊥C(A)
,则
Pb=0
。
证明1):
Pb=A(ATA)−1ATb=A(ATA)−1ATAx=A((ATA)−1ATA)x=Ax=b
证明2):
Pb=A(ATA)−1ATb=A(ATA)−1(ATb)=A(ATA)−10=0
具体的图示化看下文:
1.2一般情形
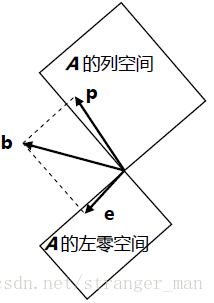
一般情况下,
b
将会有一个垂直于
A
的分量,有一个在
A
列空间中的分量,投影的作用就是去掉垂直分量而保留列空间中的分量。
向量
b
投影后,有
b=e+p,p=Pb,e=(I−P)b
,这里的
p
是
b
在
C(A)
中的分量,而
e
是
b
在
N(AT)
中的分量。
可以理解为:向量
b
的投影在
A
的列空间,偏差向量的投影在左零空间上,我们知道
P
,可以将
b
投影到
p
,那么一个什么样的投影矩阵把
b
投影到了
e
?因为列空间与左零空间正交补,所以他们共同组成了整个空间,
I
的列空间就是整个空间,
I−P
就是把
b
投影到
e
的矩阵。
2. 最小二乘法(Ax=b)
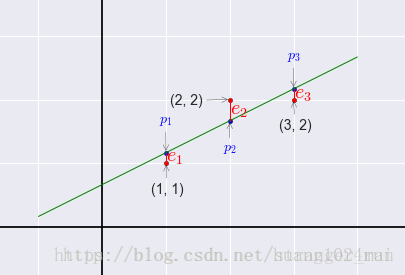
回到上一讲最后提到的例题:
我们需要找到距离图中三个点
(1,1),(2,2),(3,2)
,偏差最小的直线:
y=C+Dt
。
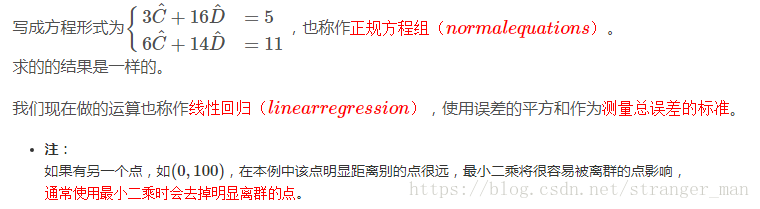
根据条件可以得到方程组:
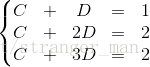 ,写作矩阵形式:
,写作矩阵形式: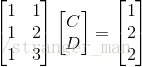 ,也就是我们的
Ax=b
,很明显方程组无解。
,也就是我们的
Ax=b
,很明显方程组无解。
此时我们要找到最接近的解”最优解”,我们要使得解最优即误差最小,定义误差为
Ax−b=e
的模长的平方即
∥∥Ax−b∥2=∥e∥2=e21+e22+e23
。此处使用平方的原因一是排除开根号带来的非线性运算,一是方便利用偏导数求解最小值。
2.1利用偏导
这里如果使用偏导数我们也能得到关于最优解的方程,展开结果为:
然后对
C
求偏导为
6C−10+12D=0
;对D求偏导为
28D−22+12C=0
。 解方程得
C^=23,D^=12
,则“最佳直线”为
y=23+12t
,则“最佳直线”为y=23+12t,带回原方程组解得
p1=76,p2=53,p3=136
,即
e1=−16,e2=13,e3=−16
。 最终得到:
p=⎡⎣⎢⎢7653136⎤⎦⎥⎥
, ,易看出
b=p+e
,同时我们发现
p⋅e=0
即
p⊥e
。可以验证,向量
p
与
e
正交,并且
e
与矩阵
A
的列空间正交。
,易看出
b=p+e
,同时我们发现
p⋅e=0
即
p⊥e
。可以验证,向量
p
与
e
正交,并且
e
与矩阵
A
的列空间正交。
可以验证,向量
p
与
e
正交,并且
e
与矩阵
A
的列空间正交。
pTe=7/6∗(−1/6)+5/3∗1/3+13/6∗(−1/6)=0
eTa1=1∗(−1/6)+1∗1/3+1∗(−1/6)=0
eTa2=1∗(−1/6)+2∗1/3+3∗(−1/6)=0
误差向量e不仅垂直于投影向量p,它同时垂直于列空间。
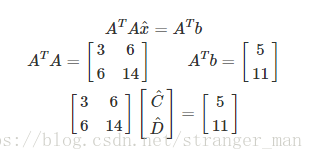
2.2利用矩阵
用矩阵的方法求解
Ax^=Pb
得到的方程是一样的,现在我们尝试解出
x^=[C^D^],p=⎡⎣⎢p1p2p3⎤⎦⎥
。
3.证明
ATA
可逆