前言
损失函数是用来评价模型的预测值和真实值一致程度,损失函数越小,通常模型的性能越好。不同的模型用的损失函数一般也不一样。损失函数主要是用在模型的训练阶段,如果我们想让预测值无限接近于真实值,就需要将损失值降到最低,在这个过程中就需要引入损失函数,而损失函数的选择又是十分关键。尤其是在目标检测中,损失函数直接关乎到检测效果是否准确,其中IOU损失函数目前主要应用于目标检测的领域,其演变的过程如下:IOU --> GIOU --> DIOU -->CIOU损失函数,每一种损失函数都较上一种损失函数有所提升,下面来具体介绍这几种损失函数。
1 IoU(Intersection over Union)
1.1 IoU简介
UnitBox: An Advanced Object Detection Network
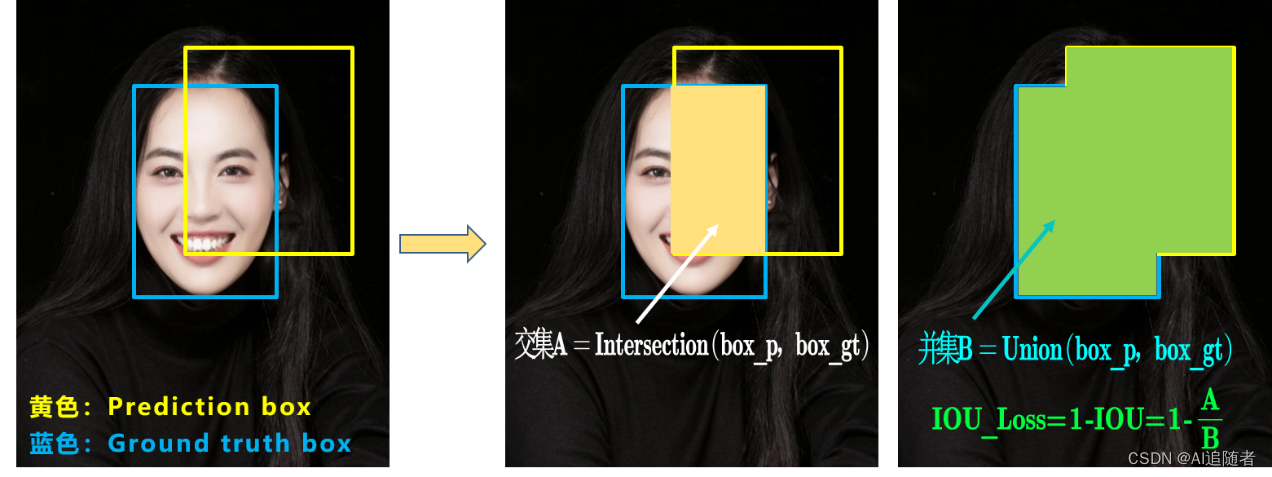
IoU全称Intersection over Union,交并比。IoU是一种测量在特定数据集中检测相应物体准确度的一个标准。只要是在输出中得出一个预测范围(bounding boxes)的任务都可以用IoU来进行测量。
IoU算法是使用最广泛的算法,大部分的检测算法都是使用的这个算法。在目标识别中,我们的预测框与实际框的某种比值就是IoU。

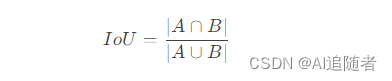
1.2 IoU公式
1.3 优点
- IOU能够直观地反映出目标检测结果与真实情况之间的匹配程度。
- IOU具有尺度不变性,由于IOU是基于重叠度量的,它不受目标尺度和形状变换的影响,这使得IOU适用于各种不同尺度和形状的目标检测任务。
1.4 缺点
- 当预测框和目标框不相交时,即IOU=0时,不能反映两个目标之间距离的远近,此时损失函数不可导,IOU Loss 无法优化。
- 当两个检测框大小相同,两个IOU也相同,IOU_Loss无法精确的反映两个框的重合度大小。

1.5 IoU代码
def IoU(box1, box2):
b1_x1, b1_y1, b1_x2, b1_y2 = box1
b2_x1, b2_y1, b2_x2, b2_y2 = box2
xx1 = np.maximum(b1_x1, b2_x1)
yy1 = np.maximum(b1_y1, b2_y1)
xx2 = np.minimum(b1_x2, b2_x2)
yy2 = np.minimum(b1_y2, b2_y2)
w = np.maximum(0.0, yy2 - yy1)
h = np.maximum(0.0, xx2 - xx1)
inter = w * h
IoU = inter/((b1_x2-b1_x1)*(b1_y2-b1_y1) + (b2_x2-b2_x1)*(b2_y2-b2_y1) - inter)
print("IoU: ", IoU)
if __name__ == "__main__":
box1 = np.array([100, 100, 210, 210])
box2 = np.array([150, 150, 230, 220])
IoU(box1, box2)2 GIoU
Generalized Intersection over Union: A Metric and A Loss for Bounding BoxRegression
2.1 GIoU简介
通过上述分析,当预测框和真实框不相交时IoU值为0,导致很大范围内损失函数没有梯度。针对这一问题,提出了GIoU作为损失函数。GIoU比IoU多了一个‘Generalized’,能在更广义的层面上计算IoU。当检测框和真实框没有出现重叠的时候IoU的loss都是一样的,因此GIoU就引入了最小封闭形状C(C可以把A,B包含在内),在不重叠情况下能让预测框尽可能朝着真实框前进,这样就可以解决检测框和真实框没有重叠的问题 。
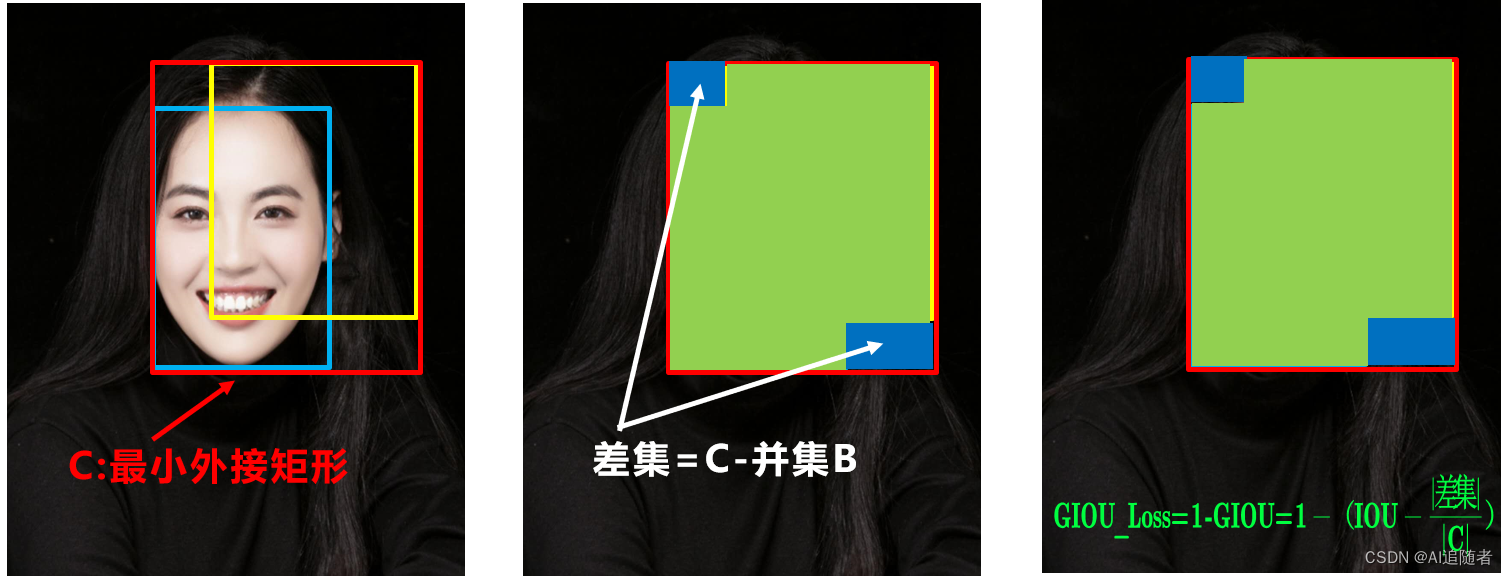
2.2 GIoU公式
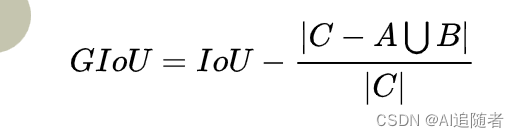
算法公式及其解释:其实想法也很简单(但这一步很难):假如现在有两个box A,B,我们找到一个最小的封闭形状C,让C可以把A,B包含在内,然后再计算C中没有覆盖A和B的面积占C总面积的比值,最后用A与B的IoU减去这个比值,GIoU计算公式如下
2.3 优点
- GIOU_Loss中,增加了相交尺度的衡量方式,缓解了单纯IOU_Loss时的尴尬,但是依然没有完全解决IoU存在的问题
2.4 缺点
- 对每个预测框与真实框均要去计算最小外接矩形,计算及收敛速度受到限制
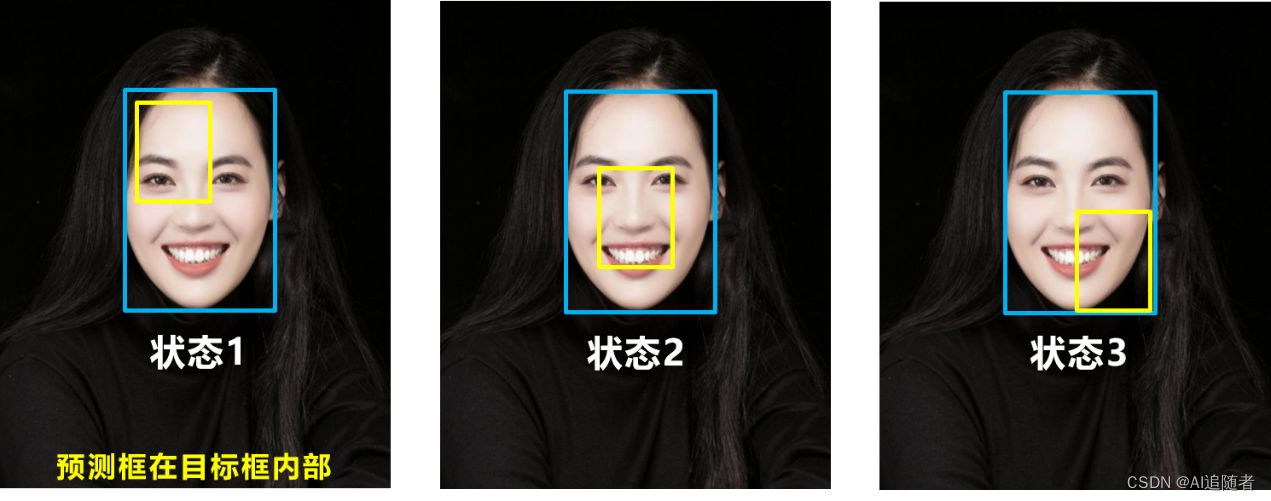
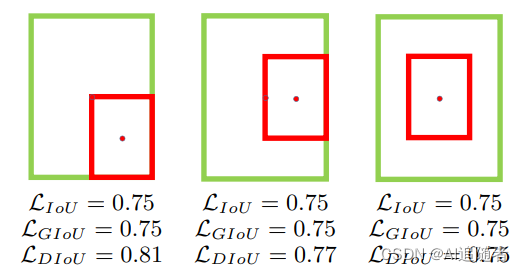
- 状态1、2、3都是预测框在目标框内部且预测框大小一致的情况,这时预测框和目标框的差集都是相同的,因此这三种状态的GIoU值也都是相同的,这时GIoU退化成了IoU,无法区分相对位置关系。
2.5 GIoU代码
def GIoU(box1, box2):
b1_x1, b1_y1, b1_x2, b1_y2 = box1
b2_x1, b2_y1, b2_x2, b2_y2 = box2
# IOU
xx1 = np.maximum(b1_x1, b2_x1)
yy1 = np.maximum(b1_y1, b2_y1)
xx2 = np.minimum(b1_x2, b2_x2)
yy2 = np.minimum(b1_y2, b2_y2)
inter_w = np.maximum(0.0, yy2 - yy1)
inter_h = np.maximum(0.0, xx2 - xx1)
inter = inter_w * inter_h
Union = (b1_x2-b1_x1)*(b1_y2-b1_y1) + (b2_x2-b2_x1)*(b2_y2-b2_y1) - inter
# GIOU
C_xx1 = np.minimum(b1_x1, b2_x1)
C_yy1 = np.minimum(b1_y1, b2_y1)
C_xx2 = np.maximum(b1_x2, b2_x2)
C_yy2 = np.maximum(b1_y2, b2_y2)
C_area = (C_xx2 - C_xx1) * (C_yy2 - C_yy1)
IOU = inter / Union
GIOU = IOU - abs((C_area-Union)/C_area)
print("GIOU:", GIOU)
if __name__ == "__main__":
box1 = np.array([100, 100, 210, 210])
box2 = np.array([150, 150, 230, 220])
GIoU(box1, box2)3 DIoU
Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression
3.1 简介
好的目标框回归函数应该考虑三个重要几何因素:重叠面积、中心点距离,长宽比。针对IoU和GIoU存在的问题,作者从两个方面进行考虑
- 一:如何最小化预测框和目标框之间的归一化距离?
- 二:如何在预测框和目标框重叠时,回归的更准确?
针对第一个问题,提出了DIoU_Loss(Distance_IoU_Loss),从而使收敛速度更快,性能更好。
3.2 DIoU公式

其中,,
分别表示预测框和真实框的中心点,且
表示两个中心点间的欧式距离,
表示能够同时包含预测框和真实框的最小闭包区域的对角线距离。

3.3 优点
- DIOU在与目标框重叠时,仍然可以为边界框提供移动方向;
- DIOU可以直接最小化两个目标框的距离,因此比GIOU收敛快得多;
- DIOU还可以替换普通的IOU评价策略,应用于NMS中,使得NMS得到的结果更加合理和有效。
3.4 缺点
- DIoU考虑了重叠面积和中心点距离,当目标框包裹预测框的时候,直接度量2个框的距离,因此DIoU收敛的更快,但并没有考虑到长宽比。
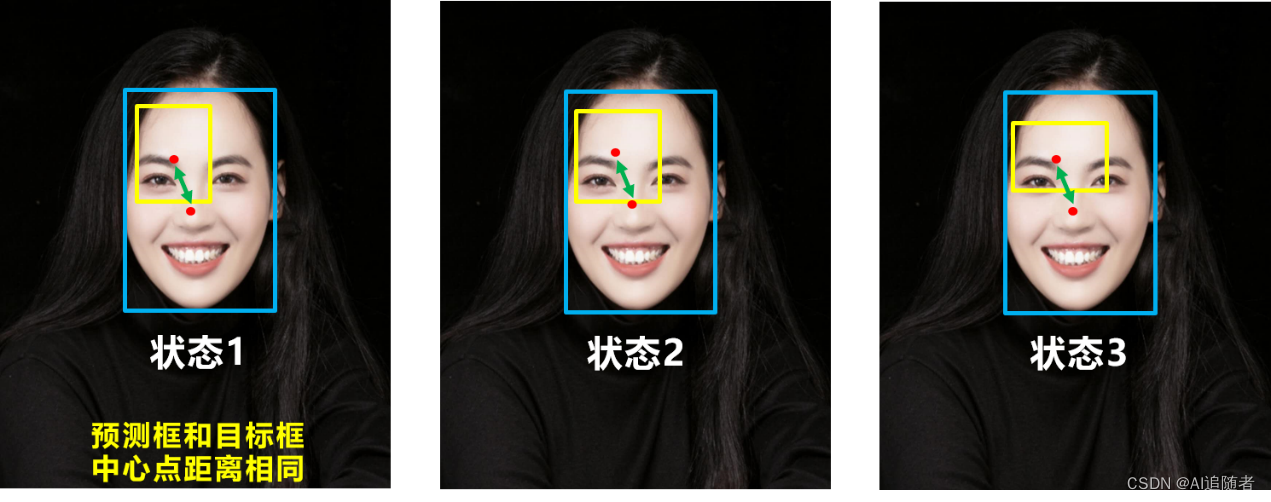
比如上面三种情况,目标框包裹预测框,本来DIOU_Loss可以起作用。但预测框的中心点的位置都是一样的,因此按照DIOU_Loss的计算公式,三者的值都是相同的。
3.5 DIoU代码
def DIoU(box1, box2):
b1_x1, b1_y1, b1_x2, b1_y2 = box1
b2_x1, b2_y1, b2_x2, b2_y2 = box2
# IOU
xx1 = np.maximum(b1_x1, b2_x1)
yy1 = np.maximum(b1_y1, b2_y1)
xx2 = np.minimum(b1_x2, b2_x2)
yy2 = np.minimum(b1_y2, b2_y2)
inter_w = np.maximum(0.0, xx2 - xx1)
inter_h = np.maximum(0.0, yy2 - yy1)
inter = inter_w * inter_h
Union = (b1_x2 - b1_x1)*(b1_y2 - b1_y1) + (b2_x2 - b2_x1)*(b2_y2 - b2_y1) - inter
# DISTANCE
C_xx1 = np.minimum(b1_x1, b2_x1)
C_yy1 = np.minimum(b1_y1, b2_y1)
C_xx2 = np.maximum(b1_x2, b2_x2)
C_yy2 = np.maximum(b1_y2, b2_y2)
C_area = (C_xx2 - C_xx1) * (C_yy2 - C_yy1)
center_b_x = (b1_x1+b1_x2)/2
center_b_y = (b1_y1+b1_y2)/2
center_gtb_x = (b2_x1+b2_x2)/2
center_gtb_y = (b2_y1+b2_y2)/2
center_distance = (center_gtb_x-center_b_x)**2 + (center_gtb_y-center_b_y)**2
c_distance = (C_xx2 - C_xx1)**2 + (C_yy2 - C_yy1)**2
IOU = inter/Union
DIOU = IOU - center_distance /c_distance
print("DIOU:", DIOU)
if __name__ == "__main__":
box1 = np.array([100, 100, 210, 210])
box2 = np.array([150, 150, 230, 220])
DIoU(box1, box2)4 CIoU
Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression
4.1 简介
DIoU考虑了重叠面积和中心点距离,当目标框包裹预测框的时候,直接度量2个框的距离,因此DIoU收敛的更快,但并没有考虑到长宽比。针对这个问题,又提出了CIOU_Loss,不对不说,科学总是在解决问题中,不断进步!!
CIoU就是在DIoU的基础上增加了检测框尺度的loss,增加了长和宽的loss,使得目标框回归更加稳定,不会像IoU和GIoU一样出现训练过程中发散等问题。
4.2 CIoU公式

是用来衡量长宽比一致性的参数,
定义如下:


4.3 优点
- 形状不变性: CIOU 损失函数在设计上考虑了目标框的形状信息,通过引入修正因子,使得损失对于不同形状的目标框更具鲁棒性。这使得模型更容易捕捉目标的准确形状。
- 对定位精度的敏感性: CIOU 损失函数对目标框的位置预测更为敏感,因为它考虑了目标框的对角线距离。这有助于提高目标检测模型在定位目标时的精度。
- 全面性: CIOU 损失函数综合考虑了位置、形状和方向等多个因素,使得模型更全面地学习目标框的特征。这有助于提高模型在复杂场景中的性能。
4.4 缺点
- 如果预测框和gt框的长宽比是相同的,那么长宽比的惩罚项恒为0,不合理
- 观察CIoU中w, h相对于v的梯度,发现这两个梯度是一对相反数,也就是说,w和h不能同时增大或减小,这显然也不够合理的。
4.5 代码
def CIoU(box1, box2):
b1_x1, b1_y1, b1_x2, b1_y2 = box1
b2_x1, b2_y1, b2_x2, b2_y2 = box2
# IOU
xx1 = np.maximum(b1_x1, b2_x1)
yy1 = np.maximum(b1_y1, b2_y1)
xx2 = np.minimum(b1_x2, b2_x2)
yy2 = np.minimum(b1_y2, b2_y2)
inter_w = np.maximum(0.0, xx2 - xx1)
inter_h = np.maximum(0.0, yy2 - yy1)
inter = inter_w*inter_h
Union = (b1_x2-b1_x1)*(b1_y2-b1_y1) + (b2_x2-b2_x1)*(b2_y2-b2_y1) - inter
IOU = inter/Union
C_xx1 = np.minimum(b1_x1, b2_x1)
C_yy1 = np.minimum(b1_y1, b2_y1)
C_xx2 = np.maximum(b1_x2, b2_x2)
C_yy2 = np.maximum(b1_y2, b2_y2)
# DISTANCE
center_b_x = (b1_x1 + b1_x2)/2
center_b_y = (b1_y1 + b1_y2)/2
center_gtb_x = (b2_x1 + b2_x2)/2
center_gtb_y = (b2_y1 + b2_y2)/2
C_area = (C_xx2-C_xx1)*(C_yy2-C_yy1)
Distance = (center_gtb_x-center_b_x)**2 + (center_gtb_y-center_b_y)**2
Distance_area = Distance/C_area**2
# aspect ratio
pred_w = b1_y2 - b1_y1
pred_h = b1_x2 - b1_x1
gt_w = b2_y2 - b2_y1
gt_h = b2_x2 - b2_x1
v = (4/(np.pi)**2)*(np.arctan(gt_w/gt_h) - np.arctan(pred_w/pred_h))**2
alpha = v/((1-IOU) + v)
CIOU = IOU - Distance_area - alpha*v
print("CIOU:", CIOU)
if __name__ == "__main__":
box1 = np.array([100, 100, 210, 210])
box2 = np.array([150, 150, 230, 220])
CIoU(box1, box2)