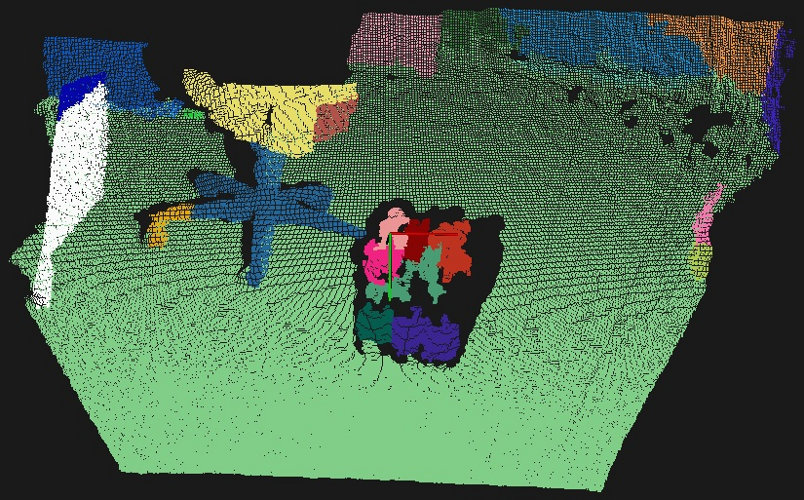
效果:
代码:
#include <iostream>
#include <thread>
#include <vector>
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/search/search.h>
#include <pcl/search/kdtree.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/filters/filter_indices.h> // for pcl::removeNaNFromPointCloud
#include <pcl/segmentation/region_growing_rgb.h>
using namespace std::chrono_literals;
int main()
{
pcl::search::Search<pcl::PointXYZRGB>::Ptr tree (new pcl::search::KdTree<pcl::PointXYZRGB>);
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGB>);
if( pcl::io::loadPCDFile<pcl::PointXYZRGB>("region_growing_rgb_tutorial.pcd", *cloud) == -1)
{
std::cout << "cloud reading failed." << std::endl;
return (-1);
}
pcl::IndicesPtr indices (new std::vector<int>);
pcl::removeNaNFromPointCloud(*cloud, *indices); //从点云中移除包含NaN值的点,并返回非NaN点的索引
pcl::RegionGrowingRGB<pcl::PointXYZRGB> reg;
reg.setInputCloud(cloud);
reg.setIndices(indices);
reg.setSearchMethod(tree);
reg.setDistanceThreshold(10);
reg.setPointColorThreshold(6);
reg.setRegionColorThreshold(5);
reg.setMinClusterSize(600);
std::vector<pcl::PointIndices> clusters;
reg.extract(clusters);
pcl::PointCloud <pcl::PointXYZRGB>::Ptr colored_cloud = reg.getColoredCloud();
pcl::visualization::CloudViewer viewer("cluster viewer");
viewer.showCloud(colored_cloud);
while (!viewer.wasStopped()) {
std::this_thread::sleep_for(100);
}
return(0);
}