在智能网联智慧交通领域,全局路径规划是自动驾驶系统中至关重要的一环。本文将深入探讨自动驾驶沙盘中采用Dijkstra算法实现的全局路径规划,并通过实际代码演示其在智慧交通场景中的应用。
第一部分:Dijkstra算法原理解析
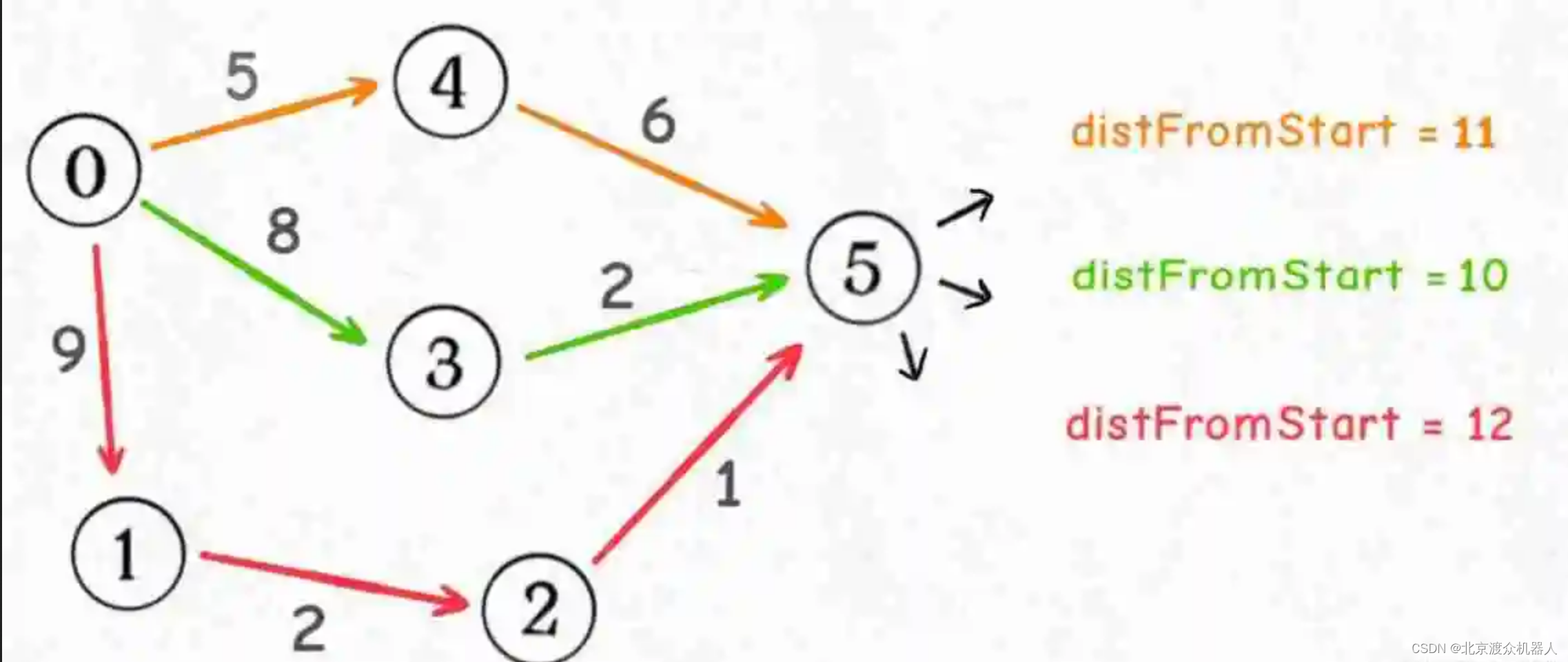
Dijkstra算法是一种用于解决图中单源最短路径问题的贪心算法。其主要目标是找到从起点到图中所有其他节点的最短路径。
-
初始化
首先,我们初始化两个关键数据结构:一个用于存储节点之间距离的数组(
dist),另一个用于记录已访问节点的最短路径的优先队列(pq)。
vector<int> dist(rows, INT_MAX); // 距离数组,初始值为无穷大
priority_queue<pair<int, int>, vector<pair<int, int>>, greater<pair<int, int>>> pq; // 优先队列,用于按距离排序2.设定起点
将起点的距离设为0,并将其加入优先队列。
dist[start] = 0;
pq.push({0, start});3.迭代更新
迭代过程中,从优先队列中取出当前距离最小的节点。对于该节点的所有邻居,如果通过当前节点到达它们的路径更短,则更新其距离并将其加入优先队列。
while (!pq.empty()) {
int u = pq.top().second;
pq.pop();
for (int v = 0; v < cols; ++v) {
if (map[u][v] && dist[v] > dist[u] + map[u][v]) {
dist[v] = dist[u] + map[u][v];
pq.push({dist[v], v});
}
}
} 在每一步迭代中,算法总是选择当前距离最小的节点,确保在每次迭代后dist数组中存储的是已知起点到达每个节点的最短距离。

4.最终结果
最终,dist数组中存储的即为从起点到图中各节点的最短距离。
这种贪心算法的思想在于始终选择当前看似最优的路径,并以此迭代更新直到找到最短路径。这种迭代的过程保证了在每一步都选择了局部最优解,从而最终得到了全局最优解。
// Dijkstra算法C++示例代码
#include <iostream>
#include <vector>
#include <queue>
#include <climits>
using namespace std;
typedef pair<int, int> iPair;
class Graph {
int vertices;
vector<vector<iPair>> adjList;
public:
Graph(int v);
void addEdge(int u, int v, int w);
void dijkstra(int src);
};
Graph::Graph(int v) : vertices(v), adjList(v) {}
void Graph::addEdge(int u, int v, int w) {
adjList[u].emplace_back(v, w);
adjList[v].emplace_back(u, w);
}
void Graph::dijkstra(int src) {
priority_queue<iPair, vector<iPair>, greater<iPair>> pq;
vector<int> dist(vertices, INT_MAX);
pq.push(make_pair(0, src));
dist[src] = 0;
while (!pq.empty()) {
int u = pq.top().second;
pq.pop();
for (const auto& neighbor : adjList[u]) {
int v = neighbor.first;
int weight = neighbor.second;
if (dist[v] > dist[u] + weight) {
dist[v] = dist[u] + weight;
pq.push(make_pair(dist[v], v));
}
}
}
// 输出最短路径
cout << "Vertex \t Distance from Source\n";
for (int i = 0; i < vertices; ++i)
cout << i << "\t\t" << dist[i] << endl;
}
int main() {
Graph g(6);
g.addEdge(0, 1, 5);
g.addEdge(0, 2, 1);
g.addEdge(1, 2, 2);
g.addEdge(1, 3, 6);
g.addEdge(2, 3, 1);
g.addEdge(2, 4, 4);
g.addEdge(3, 4, 3);
g.addEdge(4, 5, 2);
g.dijkstra(0);
return 0;
}第二部分:Dijkstra算法在自动驾驶沙盘中的应用
在自动驾驶沙盘中,Dijkstra算法扮演着关键的角色,负责全局路径规划。我们将深入探讨Dijkstra算法在沙盘中的应用,通过实际代码演示其在模拟环境中寻找最优路径的过程。

首先,我们需要构建沙盘地图的数据结构。在这里,我们使用二维数组表示地图,每个元素代表一个节点。节点之间的连接关系用边的权重表示,这些权重反映了节点之间的距离或代价。
#include <iostream>
#include <vector>
#include <climits>
#include <queue>
using namespace std;
class AutopilotSandbox {
public:
vector<vector<int>> map; // 二维数组表示地图
int rows, cols;
AutopilotSandbox(int r, int c) : rows(r), cols(c), map(r, vector<int>(c)) {}
// 添加道路,设定权重
void addRoad(int from, int to, int weight) {
map[from][to] = weight;
map[to][from] = weight; // 无向图
}
// Dijkstra算法实现全局路径规划
vector<int> dijkstra(int start) {
vector<int> dist(rows, INT_MAX);
priority_queue<pair<int, int>, vector<pair<int, int>>, greater<pair<int, int>>> pq;
dist[start] = 0;
pq.push({0, start});
while (!pq.empty()) {
int u = pq.top().second;
pq.pop();
for (int v = 0; v < cols; ++v) {
if (map[u][v] && dist[v] > dist[u] + map[u][v]) {
dist[v] = dist[u] + map[u][v];
pq.push({dist[v], v});
}
}
}
return dist;
}
};在上述代码中,我们创建了一个AutopilotSandbox类,其中包含了地图数据的存储和Dijkstra算法的实现。
接下来,我们将Dijkstra算法应用于沙盘中的场景。为了更直观,我们在地图上标记一些关键点,如起点、终点以及经过的节点。在实际应用中,这些节点可能对应着道路交叉口、停车场、充电站等。
int main() {
// 创建沙盘实例
AutopilotSandbox sandbox(6, 6);
// 添加道路和权重
sandbox.addRoad(0, 1, 5);
sandbox.addRoad(0, 2, 2);
sandbox.addRoad(1, 3, 4);
sandbox.addRoad(1, 4, 2);
sandbox.addRoad(2, 4, 3);
sandbox.addRoad(3, 5, 6);
sandbox.addRoad(4, 5, 1);
// 执行Dijkstra算法,获取最短路径
vector<int> shortestPath = sandbox.dijkstra(0);
// 输出最短路径
cout << "Shortest Path from 0 to other vertices:\n";
for (int i = 1; i < shortestPath.size(); ++i)
cout << "To " << i << ": " << shortestPath[i] << " units\n";
return 0;
}在这个示例中,我们展示了Dijkstra算法在自动驾驶沙盘中的应用。读者可以通过修改地图的结构和权重,以模拟不同的道路情况,深入理解全局路径规划的原理。这样的实践性示例有助于学生更好地理解算法在自动驾驶系统中的应用。
第三部分:Dijkstra算法在实际案例中的应用
在实际案例中,Dijkstra算法在自动驾驶沙盘中的应用将更具体化。我们将使用一个更大的场景,模拟城市交通网络,并通过实际的案例演示Dijkstra算法的应用。

首先,我们需要一个更大规模的沙盘,以及一个更复杂的地图。为了简化示例,我们只展示城市中的几个关键交叉口,每个交叉口都代表着一个节点。道路权重将反映真实城市交通中的拥堵情况。
// 省略AutopilotSandbox类的定义,保留上述代码
int main() {
// 创建城市交通沙盘实例
AutopilotSandbox citySandbox(10, 10);
// 添加城市道路和权重,模拟真实交通情况
citySandbox.addRoad(0, 1, 5);
citySandbox.addRoad(0, 2, 8);
citySandbox.addRoad(1, 3, 4);
citySandbox.addRoad(1, 4, 6);
citySandbox.addRoad(2, 5, 7);
citySandbox.addRoad(3, 6, 5);
citySandbox.addRoad(4, 7, 3);
citySandbox.addRoad(5, 8, 4);
citySandbox.addRoad(6, 9, 6);
citySandbox.addRoad(7, 9, 2);
citySandbox.addRoad(8, 9, 7);
// 执行Dijkstra算法,获取最短路径
vector<int> shortestPath = citySandbox.dijkstra(0);
// 输出最短路径
cout << "Shortest Path from City Center (0) to other vertices:\n";
for (int i = 1; i < shortestPath.size(); ++i)
cout << "To " << i << ": " << shortestPath[i] << " units\n";
// 模拟实际案例:选择最短路径经过的道路
cout << "\nSimulating the actual case...\n";
vector<int> actualPath = {0, 2, 5, 8, 9}; // 假设选择经过的节点
// 输出实际案例的道路
cout << "Actual Path: ";
for (int node : actualPath)
cout << node << " -> ";
cout << "Destination\n";
return 0;
}在这个实际案例中,我们模拟了一个城市交通网络,使用Dijkstra算法找到从城市中心到目标位置的最短路径。随后,我们通过实际案例模拟了用户选择最短路径经过的道路。这种场景的实际演示有助于学生理解算法在真实环境中的应用,同时提供了更多的讨论和思考空间。
通过这三个部分,读者将全面了解Dijkstra算法在智能网联智慧交通自动驾驶沙盘中的实践,为更深入的学习和研究打下坚实基础。