简介
NSGA-II(Nondominated Sorting Genetic Algorithm II)是一种经典的多目标优化算法,由Srinivas和Deb于2000年在NSGA的基础上提出,用于解决多目标优化问题。相较于NSGA,NSGA-II在运行速度和解集的收敛性上表现更好,成为了其他多目标优化算法性能的基准。
以下是 NSGA-II 的基本步骤:
-
初始化种群:首先,随机生成一个包含多个个体的初始种群。每个个体都代表一个潜在的解。
-
计算适应度:对于每个个体,计算其在目标函数空间中的适应度。适应度的计算可以根据具体问题而定,一般使用评价指标(如距离、优劣等)来表示个体的优劣程度。
-
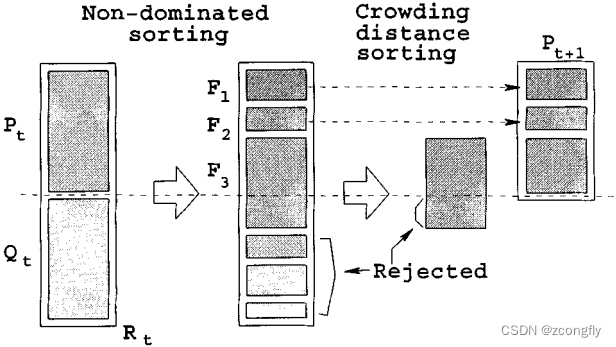
非支配排序:NSGA-II 使用非支配排序技术,将种群中的个体划分为多个前沿。这个排序过程确定每个个体的非支配级别,以标识哪些个体占据 Pareto 前沿的不同位置。较高级别的个体不被较低级别的个体支配。
-
拥挤距离计算:为了保持 Pareto 前沿的多样性,NSGA-II 计算拥挤距离,以度量个体在目标空间的密度。拥挤距离越大,个体之间的距离越远,从而有助于保持 Pareto 前沿上的均匀分布。
-
选择操作:NSGA-II 使用二元锦标赛(binary tournament)作为选择操作,在每代中,首先使用二元锦标赛选择操作从当前种群中随机选择两个个体,然后选择其中具有更高非支配级别的个体。这个选择过程是通过比较个体的非支配级别和拥挤距离来执行的。
-
交叉/变异操作:将选择出的个体通过交叉(crossover)和变异(mutation)操作生成父代种群。将父代和子代合并成一个更大的候选种群。
-
迭代:将候选种群重新进行非支配排序、拥挤距离计算、选择、交叉、变异,生成新的子代种群,迭代执行,直到满足停止条件(如达到最大迭代次数或收敛到满意的 Pareto 前沿解)。
GA→NSGA II
NSGA II是从NSGA改进过来的,个人感觉NSGA相对传统的GA算法改进不多,故这里直接梳理一下NSGA II相对传统的GA作了哪些改进。
- 非支配解和非支配排序:NSGA-II 引入了非支配排序,它通过将个体划分为多个前沿来确定每个个体的非支配级别。这种排序方法有助于找到 Pareto 前沿上的多样性解,而传统 GA 通常只关注单一的目标。
关于支配与非支配的概念,可以看这篇文章:https://blog.csdn.net/weixin_43893771/article/details/106689335
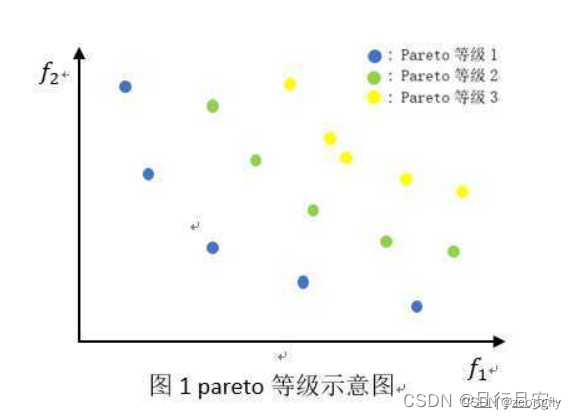
简单说,在多目标优化问题中,如果对于所有的目标,解1都优于解2,就称解1“支配于”解2;若解1在一部分目标上的表现优于解2,在另一部分的目标上的表现劣于解2,则称解1和解2之间互不支配(非支配)。非支配解之间由于其在不同目标上表现各有优劣,势均力敌,可将它们放在同一层级,称为“ Pareto 前沿层”,各层之间存在明显的上层支配下层的关系,因而我们可以对这些层次之间进行排序,规定表现最优的解在第一层,支配于下边的所有解,依次类推(类比一下人与人之间的三六九等)。这样,就对多目标问题的目标函数和解的评价建立了一个很好的描述模型。在下边的二维视图中可以明显地看出解的支配与非支配关系。
2. 拥挤距离:NSGA-II 引入了拥挤距离来维护 Pareto 前沿上解的多样性。拥挤距离度量了个体在目标空间的密度,有助于确保前沿上的解均匀分布。
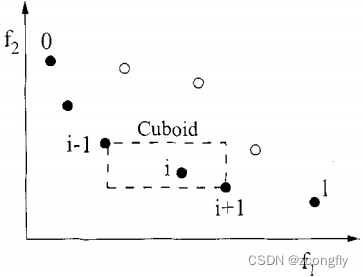
直观上理解,某个解的拥挤距离可认为是以该解所在的Pareto 前沿层的左右两边的相邻两个解(以二维为例)为顶点构成的长方形的周长(极端的两个端点拥挤距离设为一个较大值)。扩展到高维,在计算拥挤距离时,个体通常被分配到一个多维空间中的一个长方形(或超立方体)中,这个长方形的边长由个体在每个维度上的分布情况决定。拥挤距离是由各个维度上的间隔之和组成,通常用于保持前沿上的解的分散性,使算法能够在多个目标函数下找到更多高质量的解。
3. 精英策略:将父代和子代连接成一个2N的种群是NSGA II中的一种实现精英主义的策略。在下一代中,最优解通常是当前种群中的一部分。通过将父代和子代合并成一个更大的种群,最优解不容易在选择操作中被遗漏。另外,子代通常包含一些新的解决方案,而父代包含了遗传信息,合并子代和父代也有助于保持种群的多样性。
注:实际上,我们还可以连接多代(如父代、子代和孙代)形成一个更大的种群(3N或更多),这被称为多代连接。
- 二元锦标赛选择:传统的GA通常用的是轮盘赌选择,NSGA II中使用的是二元锦标赛选择(实际上,两者都是特别简单的算法,其选用可以参考我的另一篇文章:【调度算法】关于轮盘赌和锦标赛两种选择算子的选用思考),确切地说,它是通过二元锦标赛和拥挤距离,共同完成对下一代的选择。
原文(A Fast and Elitist Multiobjective Genetic Algorithm:NSGA-II)摘录:
It is important to note that we use a binary tournament selection operator but the selection criterion is now based on the crowded-comparison operator ≺ n \prec_n ≺n.
用大白话说就是,选择子代种群时,使用二元锦标赛选择算法,并且在进行二元锦标赛时,选择标准是基于拥挤距离来确定获胜者。即,拥挤距离用于衡量解的拥挤程度,以确定哪个解应该在二元锦标赛中获胜。
算法实现
原代码GitHub地址:https://github.com/haris989/NSGA-II/tree/master
应该是最早最简单的对NSGA II的复现吧(膜拜大佬)。只是对原算法添加了注释,基本没有对主要函数进行修改。
# Importing required modules
import math
import random
import matplotlib.pyplot as plt
# First function to optimize
def function1(x):
value = -x ** 2
return value
# Second function to optimize
def function2(x):
value = -(x - 2) ** 2
return value
# Function to find index of list
def index_of(a, list):
'''
在给定的列表中查找指定元素的索引
:param a: 要查找的元素
:param list: 要查找的列表
:return: 元素a在list中的索引
'''
for i in range(0, len(list)):
if list[i] == a:
return i
return -1
# Function to sort by values
def sort_by_values(list1, values):
'''
根据给定的值列表对另一个列表进行排序,并返回排好序后的索引列表.
:param list1: 要排序的列表
:param values: 用于排序的值列表
:return: 排序后的列表,返回的是索引???
'''
sorted_list = []
while len(sorted_list) != len(list1):
if index_of(min(values), values) in list1: # 判断values中最小值的索引是否为list1中的元素(???为毛???这样会陷入死循环吧?)
sorted_list.append(index_of(min(values), values)) # 这里插入的直接就是list1列表根据values列表排序规则排序后的索引??
values[index_of(min(values), values)] = math.inf
# 这个函数会陷入死循环,所以我加了个if语句,当value全为inf时直接break
if set(values) == {
math.inf}:
break
return sorted_list
# Function to carry out NSGA-II's fast non dominated sort
def fast_non_dominated_sort(values1, values2):
'''
:param values1: 多目标优化问题中每个解在第一个目标函数下的取值,如[5, 2, 9, 3, 7, 4]
:param values2: 多目标优化问题中每个解在第二个目标函数下的取值,如[6, 4, 8, 2, 5, 3]
:return: 二维列表 front,其中包含 Pareto 前沿中每层非支配解的索引,如[[2], [0, 4], [1, 5], [3]]
'''
# 初始化 S, front, n 和 rank 列表
S = [[] for _ in range(0, len(values1))] # 记录每个解的被支配解集合
front = [[]] # 记录 Pareto 前沿层级
n = [0 for _ in range(0, len(values1))] # 记录每个解被支配的次数
rank = [0 for _ in range(0, len(values1))] # 记录每个解所处的 Pareto 前沿层级
# 对每个解计算被支配解集合 S 和支配该解的次数 n
for p in range(0, len(values1)):
S[p] = []
n[p] = 0
for q in range(0, len(values1)):
if (values1[p] > values1[q] and values2[p] > values2[q]) or (
values1[p] >= values1[q] and values2[p] > values2[q]) or (
values1[p] > values1[q] and values2[p] >= values2[q]):
if q not in S[p]:
S[p].append(q)
elif (values1[q] > values1[p] and values2[q] > values2[p]) or (
values1[q] >= values1[p] and values2[q] > values2[p]) or (
values1[q] > values1[p] and values2[q] >= values2[p]):
n[p] = n[p] + 1
# 如果一个解没有被任何其他解支配,则将其归为 Pareto 前沿的第一层
if n[p] == 0:
rank[p] = 0
if p not in front[0]:
front[0].append(p)
# 循环计算 Pareto 前沿集合
i = 0
while front[i]:
Q = []
for p in front[i]:
# 遍历被支配解集合 S,更新其 n 值
for q in S[p]:
n[q] = n[q] - 1
# 如果某个解 q 不被其他解支配,则将其归为下一层 Pareto 前沿
if n[q] == 0:
rank[q] = i + 1
if q not in Q:
Q.append(q)
i = i + 1
# 将下一层 Pareto 前沿加入到 front 中
front.append(Q)
# 删除最后一个空元素
del front[len(front) - 1]
# 返回 Pareto 前沿集合
return front
# Function to calculate crowding distance
def crowding_distance(values1, values2, fronti):
"""
计算 Pareto 前沿中每个解的拥挤距离
:param values1: 一个列表,表示所有解在目标函数 1 下的取值
:param values2: 一个列表,表示所有解在目标函数 2 下的取值
:param fronti: 一个列表,包含 Pareto 前沿中某一层的非支配解的索引
:return 一个列表,表示 Pareto 前沿中每个解的拥挤距离
"""
distance = [0 for _ in range(0, len(fronti))] # 初始化第i层所有解的拥挤距离为 0
sorted1 = sort_by_values(fronti, values1[:]) # 根据目标函数 1 的取值,为当前前沿层排序并得到排序后的索引列表
sorted2 = sort_by_values(fronti, values2[:]) # 根据目标函数 2 的取值,为当前前沿层排序并得到排序后的索引列表
# 对于前沿中的第一个和最后一个解,将其拥挤距离设为一个较大的数
distance[0] = 4444444444444444
distance[len(fronti) - 1] = 4444444444444444
# 计算前沿中其他解的拥挤距离
if len(distance) <= 2:
return distance
for k in range(1, len(fronti) - 1):
# 按照目标函数 1 进行计算,并将结果加到该解的拥挤距离上
distance[k] = distance[k] + (values1[sorted1[k + 1]] - values2[sorted1[k - 1]]) / (max(values1) - min(values1))
# 按照目标函数 2 进行计算,并将结果加到该解的拥挤距离上
distance[k] = distance[k] + (values1[sorted2[k + 1]] - values2[sorted2[k - 1]]) / (max(values2) - min(values2))
return distance # 返回所有解的拥挤距离列表
# Function to carry out the crossover
def crossover(a, b):
'''
输入参数a和b是两个染色体,其中r是一个0到1之间的随机数。该函数根据随机数r的大小,选择将a和b进行加权平均或者差值运算,来生成新的染色体。然后,通过调用mutation函数对新的基因进行变异处理。
'''
r = random.random()
if r > 0.5:
return mutation((a + b) / 2)
else:
return mutation((a - b) / 2)
# Function to carry out the mutation operator
def mutation(solution):
'''
输入参数solution是一个染色体。该函数根据mutation_prob的大小,决定是否对基因进行变异处理。mutation_prob是一个0到1之间的随机数,用来表示变异的概率。在这个函数中,如果mutation_prob小于1,则将solution的值替换为min_x和max_x之间的随机数。
'''
mutation_prob = random.random() # 变异概率
if mutation_prob < 1: # 这里表示一定会变异
solution = min_x + (max_x - min_x) * random.random() # 随机替换掉一个x的取值
return solution
# Main program starts here
if __name__ == '__main__':
pop_size = 20 # 种群大小
max_gen = 921 # 最大迭代次数
# Initialization
min_x = -55 # x的取值范围(定义域)
max_x = 55
solution = [min_x + (max_x - min_x) * random.random() for _ in range(0, pop_size)] # 在最大值和最小值之间生成随机的x取值列表
gen_no = 0 # 当前迭代次数
while gen_no < max_gen:
# 计算两个函数在当前x取值下的y值(y1、y2)
function1_values = [function1(solution[i]) for i in range(0, pop_size)]
function2_values = [function2(solution[i]) for i in range(0, pop_size)]
# 对y1和y2两个列表进行非支配排序,返回帕累托前沿中每层非支配解的索引
non_dominated_sorted_solution = fast_non_dominated_sort(function1_values[:], function2_values[:])
# print("non_dominated_sorted_solution=", non_dominated_sorted_solution)
print("The best front for Generation number ", gen_no, " is")
for valuez in non_dominated_sorted_solution[0]:
print(round(solution[valuez], 3), end=" ") # 保留3位小数
print("\n")
crowding_distance_values = [] # 拥挤距离
for i in range(0, len(non_dominated_sorted_solution)):
crowding_distance_values.append(
crowding_distance(function1_values[:], function2_values[:], non_dominated_sorted_solution[i][:]))
solution2 = solution[:] # 将x取值列表深拷贝给solution2
# Generating offsprings
# 将solution2进行交叉和变异生成子代,返回2*pop_size长度的新的solution2列表,前pop_size是父代,后pop_size是子代
while len(solution2) != 2 * pop_size:
a1 = random.randint(0, pop_size - 1)
b1 = random.randint(0, pop_size - 1)
solution2.append(crossover(solution[a1], solution[b1]))
# 计算新的y1和y2列表(新解是由父代和子代拼接成的2*pop_size列表)
function1_values2 = [function1(solution2[i]) for i in range(0, 2 * pop_size)]
function2_values2 = [function2(solution2[i]) for i in range(0, 2 * pop_size)]
# 对新的y1和y2列表进行非支配排序(父代+子代)
non_dominated_sorted_solution2 = fast_non_dominated_sort(function1_values2[:], function2_values2[:])
crowding_distance_values2 = [] # 新的拥挤距离(父代+子代)
for i in range(0, len(non_dominated_sorted_solution2)):
crowding_distance_values2.append(
crowding_distance(function1_values2[:], function2_values2[:], non_dominated_sorted_solution2[i][:]))
new_solution = [] #
for i in range(0, len(non_dominated_sorted_solution2)): # front各层的索引
non_dominated_sorted_solution2_1 = [
index_of(non_dominated_sorted_solution2[i][j], non_dominated_sorted_solution2[i]) for j in
range(0, len(non_dominated_sorted_solution2[i]))]
# 根据拥挤距离对非支配解的每一层进行排序
front22 = sort_by_values(non_dominated_sorted_solution2_1[:], crowding_distance_values2[i][:])
front = [non_dominated_sorted_solution2[i][front22[j]] for j in
range(0, len(non_dominated_sorted_solution2[i]))]
front.reverse() # 逆序,选择最末pop_size的front值(因为这里已经按照拥挤距离排序了,逆序表示选择拥挤距离较大的值,以尽可能保持解的多样性)
for value in front:
new_solution.append(value)
if len(new_solution) == pop_size:
break
if len(new_solution) == pop_size:
break
solution = [solution2[i] for i in new_solution]
gen_no = gen_no + 1
# 打印一下最终解的非支配排序结果看一下(结果发现所有的解都是非支配解。。。)
# final_f1_values = [function1(solution[i]) for i in range(0, pop_size)]
# final_f2_values = [function2(solution[i]) for i in range(0, pop_size)]
# sort_result = fast_non_dominated_sort(final_f1_values,final_f2_values)
# print(sort_result)
# Lets plot the final front now
function1 = [i * -1 for i in function1_values]
function2 = [j * -1 for j in function2_values]
plt.xlabel('Function 1', fontsize=15)
plt.ylabel('Function 2', fontsize=15)
plt.scatter(function1, function2)
plt.show()