原创 | 文 BFT机器人

01 四足机器人穿越复杂地形:得益于改进的三维视觉技术
最近,加利福尼亚大学圣地亚哥分校的研究人员为四足机器人配备了前置深度摄像头,使其能够清晰地分析周围和下方的环境。研究人员采用了一种模型,可以从短暂的2D视频帧中获取3D信息。这些数据还可以与过去的图像进行比较,以估计可能的3D变换。此外,他们的系统还具有自我检查功能,能够融合信息,形成一种短期记忆。尽管该模型不能将机器人引导到特定位置,但它能使机器人穿越具有挑战性的地形。
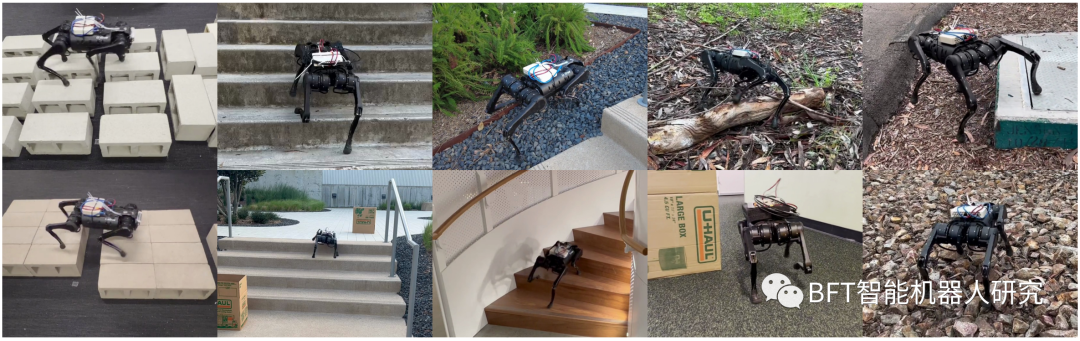
神经体积记忆用于视觉运动控制
02 Mori3:用于太空旅行的多边形变形机器人
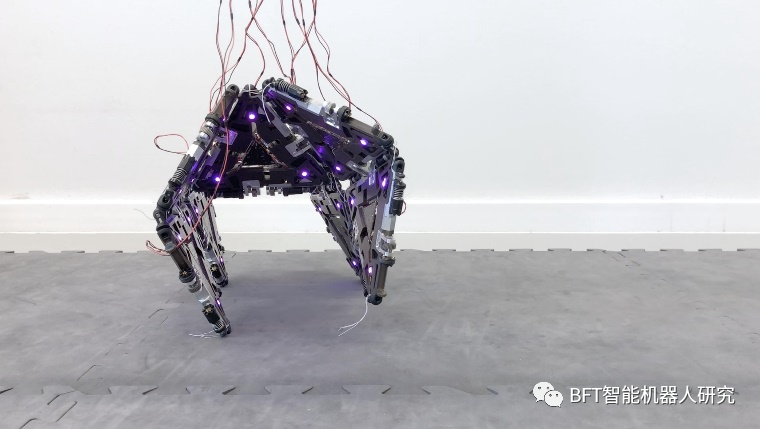
在应对困难环境的能力方面,瑞士联邦理工学院(EPFL)工程学院的研究人员创造了Mori3,一款能够改变形状并与物体和人类互动的机器人。模块化的Mori3机器人可以通过将数字多边形网格与群体行为相结合,从2D三角形变换成多种3D形状。这项研究突显了模块化机器人技术在太空探索等任务中的应用潜力。由于其适应性和装配/拆卸能力,该机器人表现出极高的多功能性。Mori3机器人将被船员用于与宇宙飞船的通信和外部维修。
03 迈向安全可靠的飞行自动驾驶的一步
而在离地面不远的领域,麻省理工学院的研究人员最近开发了一种机器学习方法,用于解决自主飞行器中具有挑战性的稳定性和避障问题。该方法在稳定性方面提供了十倍的增强,并在安全性方面优于先前的技术。研究人员通过重新定义问题为限制优化,并采用深度强化学习技术,在避开障碍物的同时,其飞行轨迹也十分稳定。这一方法在模拟的喷气式飞机飞行在狭小空间时成功避免了坠毁。该方法可以用于创建动态机器人控制器,并在任务关键型系统中维持稳定性和安全性。未来将进行不确定性计算和硬件测试的改进。
这个动图展示了研究人员如何使用他们的技术,在一个情景中成功地飞行了一个模拟的喷气式飞机。在这个情景中,飞机需要稳定飞向靠近地面的目标,同时保持非常低的飞行高度,并且在狭窄的飞行通道内保持飞行。
04 具有机械记忆效应的超材料
阿姆斯特丹大学和里昂高等师范学校的研究人员在材料的机械记忆开发方面取得了突破。他们创建了一种可以记住以前是如何弯曲或拉伸的材料,并且该材料具有一个特殊的部分或线条,在被推或拉时不会改变形状。这种超材料的发展可能在机械学、量子计算机、机器人和光子学等领域得到应用。为了实现这种机械记忆效应,研究人员使用了非可定向秩序的概念,这种秩序存在于莫比乌斯带等物品中。
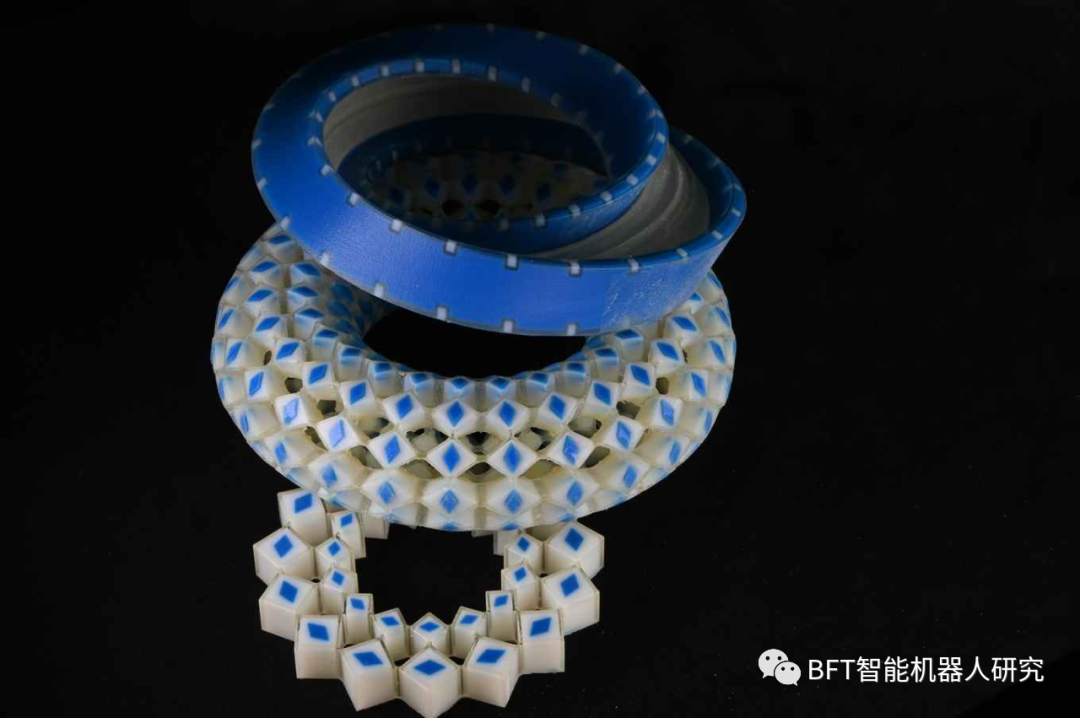
三维打印的莫比乌斯带(顶部)和两个奇数环(中部和底部)。这些都是不可定向的对象,必然会在环上有一个不变形的点。
05 混合AI驱动的计算机视觉结合物理和大数据
在增强计算机视觉技术方面,来自加州大学洛杉矶分校和美国陆军研究实验室的研究人员已经开发了一种混合策略,将基于物理的认知融入数据驱动的算法中。这种混合策略介绍了多种将物理和数据融合到人工智能中的方法,如基于物理的人工智能数据集、网络设计和网络损失函数。在图像增强、运动预测和物体跟踪方面展现出了有望的结果。根据研究人员的说法,基于深度学习的人工智能系统最终可能能够自主掌握物理规则。
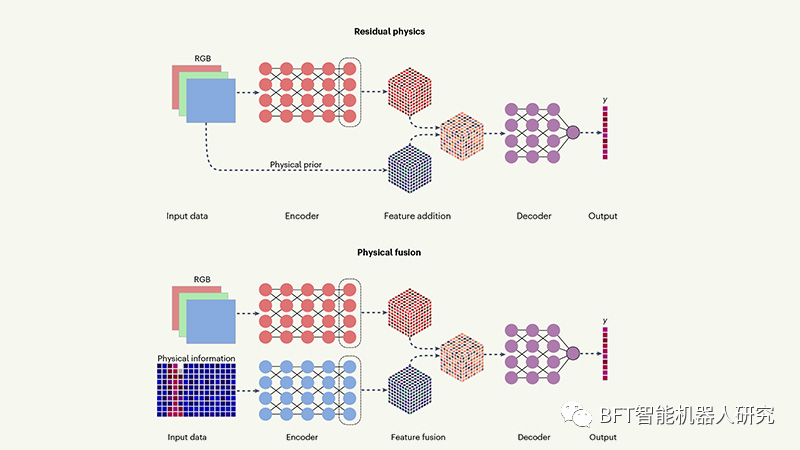
图形显示了将物理学引入到机器学习流程中的两种技术:残差物理(顶部)和物理融合(底部)
06 myCobot 320 AI Kit 2023
在工业界,Elephant Robotics发布了myCobot 320 AI Kit 2023,这是一款面向用户可编程开发的开创性机器人臂。由于其增加的工作半径、更高的负载能力和智能抓取能力,它为商业、研究和创意活动提供了灵活性。该套件相对于早期设计来说具有显著的进步,支持五种高级视觉识别算法,包括夹持器,并配备了用户友好的可视化软件。

07 Bowl Bot
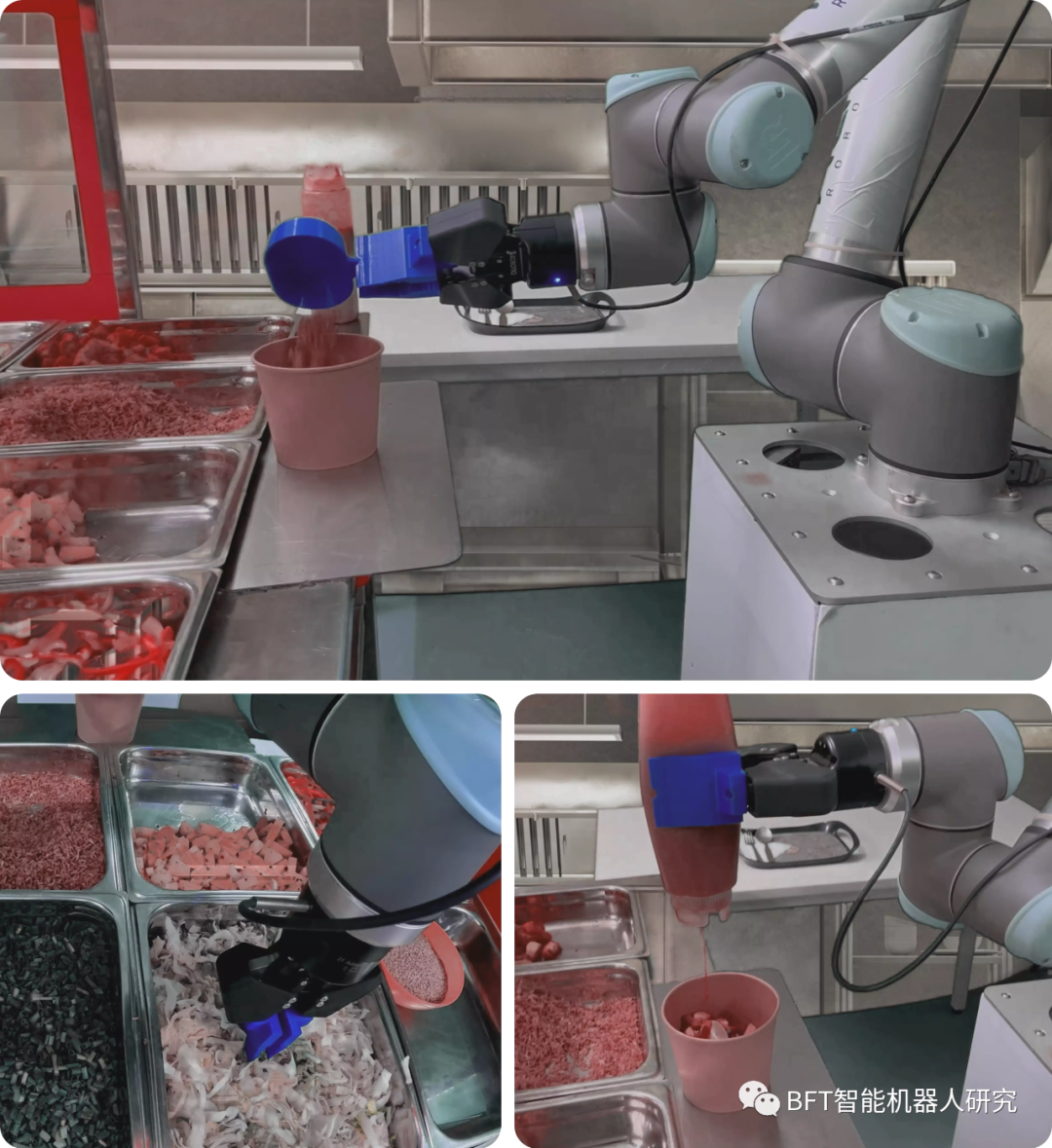
Bowl Bot是由Nala Robotics最近创建的自主、自洁的机器人,可以制作各种个性化的食物碗。它在占用空间较小的情况下为使用者提供了28种不同的底料、蛋白质、配料和酱料选择。Bowl Bot配备了先进的人工智能和视觉技术,在保持清洁的同时以快速的速度运行,并通过其自洁系统消除了交叉污染。
作者 | LJH
排版 | 小河
审核 | 柒柒
若您对该文章内容有任何疑问,请与我们联系,我们将及时回应。