安装evo
evo共有两种安装方式
快捷安装 ,直接安装最新的稳定发行版;
pip install evo --upgrade --no-binary evo
源码安装 ,下载源码进行安装;
首先在任意文件夹下下载evo,也可以在home中直接下载
git clone https://github.com/MichaelGrupp/evo.git
然后进入evo文件夹
pip install --editable . --upgrade --no-binary evo
安装完成后运行evo命令时可能会出现找不到命令的问题,只需要重启计算机即可.
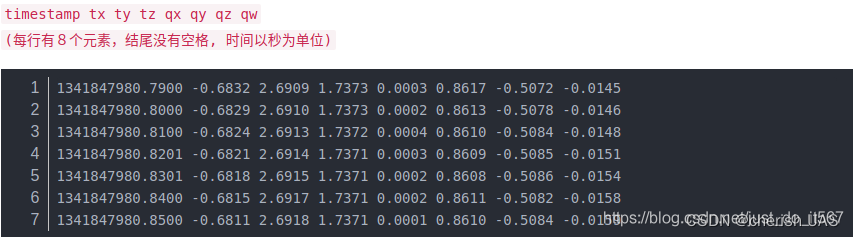
将轨迹保存为tum格式
tum数据集格式
读取保存数据demo
#include<iostream>
#include<fstream>
#include<eigen3/Eigen/Eigen>
#include<ros/ros.h>
#include<tf/transform_listener.h>
using namespace std;
ofstream foutC;
int main(int argc, char **argv){
//string file_name;
//ros::param::get("file_name",file_name);
ros::init(argc, argv, "save_traj_as_tum");
ros::NodeHandle nh;
foutC.open("./test.txt");
tf::TransformListener listener;
ros::Rate rate(20);
while(ros::ok()){
tf::StampedTransform transform;
try
{
listener.waitForTransform("/odom", "/base_link", ros::Time(0), ros::Duration(1));
listener.lookupTransform("/odom", "/base_link", ros::Time(0), transform);
foutC << transform.stamp_ << " ";
float x = transform.getOrigin().getX();
float y = transform.getOrigin().getY();
float z = transform.getOrigin().getZ();
float qx = transform.getRotation().getX();
float qy = transform.getRotation().getY();
float qz = transform.getRotation().getZ();
float qw = transform.getRotation().getW();
ROS_INFO("%f %f %f %f %f %f %f",x,y,z,qx,qy,qz,qw);
foutC << x <<" " << y << " " << z << " " << qx << " " << qy << " " << qz << " " << qw << std::endl;
}
catch(const std::exception& e)
{
std::cerr << e.what() << '\n';
}
rate.sleep();
}
foutC.close();
return 0;
}
保存完之后运行如下指令:
evo_traj tum test.txt -p
结果

原文链接:https://blog.csdn.net/just_do_it567/article/details/114672305