将分割模型就行腾搜人RT转化后得到engine,该博客主要是针对c++调用tensorRT的模型文件engine
文章目录
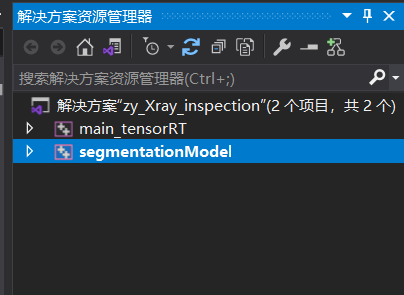
1. 框架
文件主要分为两个文件:一个是main_tensorRT(exe),用于调用部署好的AI模型(dll)
一个是segmentationModel(dll),将tensorRT推理的程序封装成dll,用来进行调用。
2. main_tensorRT(exe)
2.1 LoadCathodeHeadEngine(读取模型)
2.2 getCathodeBiImg(运行模型)
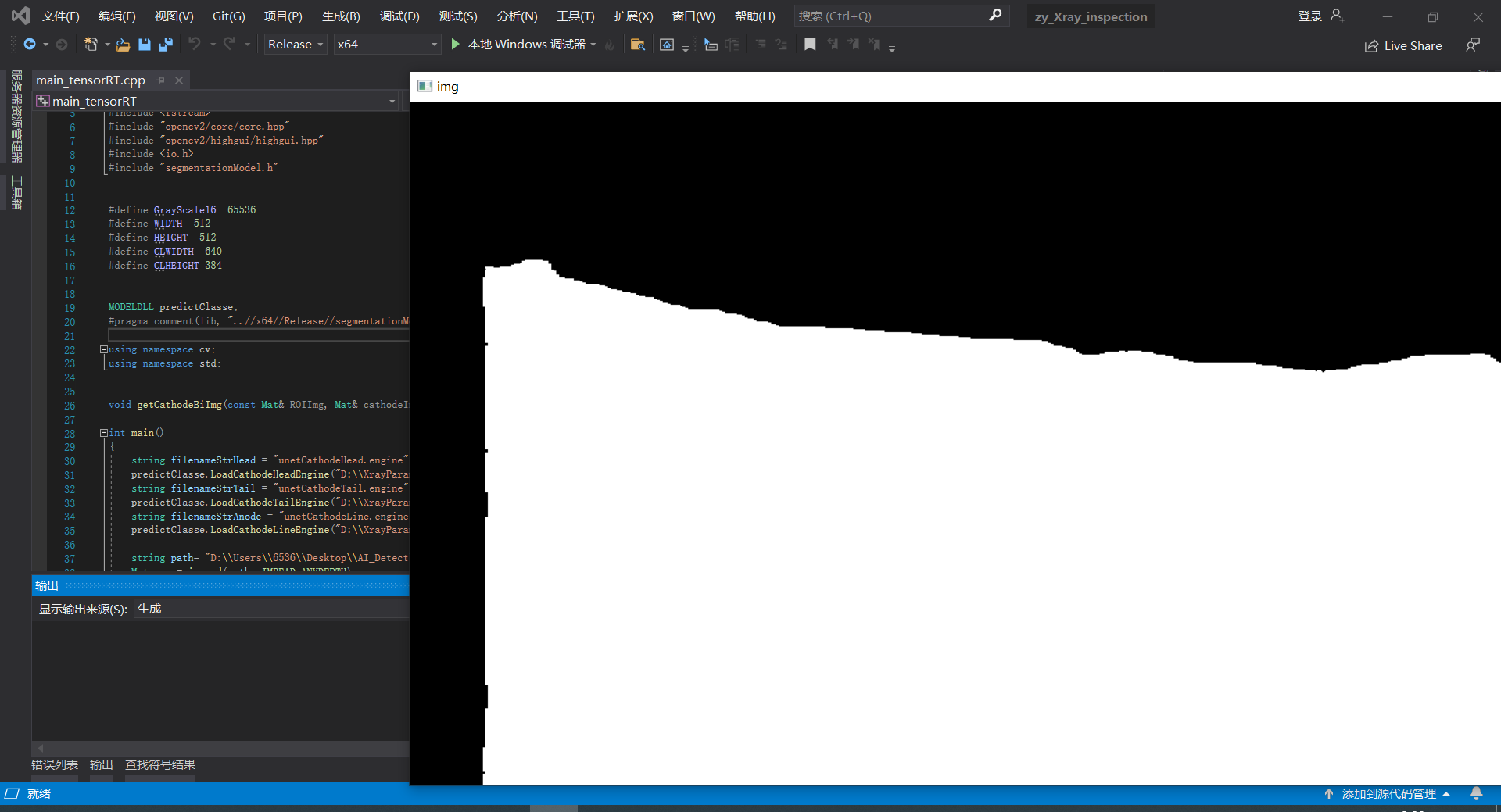
2.3 输出结果
// Xray_test.cpp : 定义控制台应用程序的入口点。
#define _AFXDLL
#include <iomanip>
#include <string>
#include <fstream>
#include "opencv2/core/core.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <io.h>
#include "segmentationModel.h"
#define GrayScale16 65536
#define WIDTH 512
#define HEIGHT 512
#define CLWIDTH 640
#define CLHEIGHT 384
MODELDLL predictClasse;
#pragma comment(lib, "..//x64//Release//segmentationModel.lib")
using namespace cv;
using namespace std;
void getCathodeBiImg(const Mat& ROIImg, Mat& cathodeImg, int& gap);
int main()
{
string filenameStrHead = "unetCathodeHead.engine";
predictClasse.LoadCathodeHeadEngine("D:\\XrayParameters\\saveEngine\\" + filenameStrHead);
string filenameStrTail = "unetCathodeTail.engine";
predictClasse.LoadCathodeTailEngine("D:\\XrayParameters\\saveEngine\\" + filenameStrTail);
string filenameStrAnode = "unetCathodeLine.engine";
predictClasse.LoadCathodeLineEngine("D:\\XrayParameters\\saveEngine\\" + filenameStrAnode);
string path= "D:\\Users\\6536\\Desktop\\AI_Detect\\mask\\1.png";
Mat pre = imread(path, IMREAD_ANYDEPTH);
int cathodeGap = 1;//分块数量
Mat cathodeMask = cv::Mat::zeros(pre.size(), CV_8UC1);
getCathodeBiImg(pre, cathodeMask, cathodeGap);//预测模块
cv::imshow("img", cathodeMask);
cv::waitKey(0);
return 0;
}
void getCathodeBiImg(const Mat& ROIImg, Mat& cathodeImg, int& gap)
{
//切割
cv::Rect rect, rect1;
for (int k = 0; k < gap; k++)
{
rect.x = k * ROIImg.cols / gap;
rect.y = 0;
rect.width = ROIImg.cols / gap;
rect.height = ROIImg.rows;
rect1.x = k * ROIImg.cols / gap;
rect1.y = 0;
rect1.width = ROIImg.cols / gap;
rect1.height = ROIImg.rows;
rect.x = max(0, int(rect.x));
rect1.x = max(0, int(rect.x));
if (ROIImg.cols % 2 != 0 && k == 0)
{
rect.width = rect.width + 61;
rect1.width = rect1.width + 61;
}
else if (k != gap - 1)
{
rect.width = rect.width + 60;
rect1.width = rect1.width + 60;
}
if (rect.x + rect.width > ROIImg.cols)
{
rect.width = ROIImg.cols - rect.x;
rect1.width = ROIImg.cols - rect1.x;
}
Mat cathodeLocImg;
predictClasse.batteryCathodeHeadPredict(ROIImg(rect), cathodeLocImg, 1, 1, WIDTH, HEIGHT);
bitwise_or(cathodeImg(rect1), cathodeLocImg, cathodeImg(rect1));
}
threshold(cathodeImg, cathodeImg, 0, 255, THRESH_BINARY);
}
3. segmentationModel(dll)
3.1 LoadCathodeHeadEngine(加载模型函数)
3.2 batteryCathodeHeadPredict(模型推理)
#include "pch.h"
#include "segmentationModel.h"
#include "cuda_runtime_api.h"
#include "logging.h"
#include "common.hpp"
#include "calibrator.h"
#define USE_FP16 // comment out this if want to use FP32
#define DEVICE 0 // GPU id
#define CONF_THRESH 0.45 // 0.5
const char* INPUT_BLOB_NAME = "data";
const char* OUTPUT_BLOB_NAME = "prob";
static Logger gLogger;
//IRuntime* runtimeROI;
//ICudaEngine* engineROI;
//IExecutionContext* contextROI;
IRuntime* runtimeCathodeHead;
ICudaEngine* engineCathodeHead;
IExecutionContext* contextCathodeHead;
IRuntime* runtimeCathodeTail;
ICudaEngine* engineCathodeTail;
IExecutionContext* contextCathodeTail;
IRuntime* runtimeCathodeLine;
ICudaEngine* engineCathodeLine;
IExecutionContext* contextCathodeLine;
MODELDLL::MODELDLL()
{
}
MODELDLL::~MODELDLL()
{
}
bool MODELDLL::LoadCathodeHeadEngine(const std::string& engineName)
{
//step1:定义打开文件的方式
std::ifstream file(engineName, std::ios_base::out | std::ios_base::binary);// 如果想以输入方式(只写)打开,就用ifstream来定义;// 如果想以输出方式(只读)打开,就用ofstream来定义;// 如果想以输入/输出方式来打开,就用fstream来定义。
if (!file.good())
{
return false;
}
//step2:定义 trtmodelstream
char* trtModelStream = nullptr;
//step3:获取文件大小
size_t size = 0;
file.seekg(0, file.end);
size = file.tellg();
//step4:回到文件的开头
file.seekg(0, file.beg);
//step5:trtModelStream被定义为一个[“引擎文件大小”]大小的字符
trtModelStream = new char[size];
assert(trtModelStream);
//step6:rtrModelStream读取文件的内容
file.read(trtModelStream, size);
//step7:关闭文件
file.close();
//step8:获取模型文件内容
std::vector<std::pair<char*, size_t>> FileContent;
FileContent.push_back(std::make_pair(nullptr, 0));
FileContent[0] = std::make_pair(trtModelStream, size);
assert(FileContent != nullptr);
//step9:创建runtime
runtimeCathodeHead = createInferRuntime(gLogger);
assert(runtime != nullptr);
//step10:反序列化创建engine
engineCathodeHead = runtimeCathodeHead->deserializeCudaEngine(FileContent[0].first, FileContent[0].second, nullptr);
assert(engine != nullptr);
//step11:创建context,创建一些空间来存储中间激活值
contextCathodeHead = engineCathodeHead->createExecutionContext();
assert(context != nullptr);
return true;
}
bool MODELDLL::batteryCathodeHeadPredict(const Mat& src, Mat& dst, const int& channel, const int& classe, const int& width, const int& height)
{
cudaSetDevice(DEVICE);
if (src.empty())
return false;
//参数初始化
float *data = new float[channel * width * height];
float* prob = new float[classe * width * height];
cv::Mat primg = src.clone();
cv::resize(primg, primg, cv::Size( width, height));
normalizeImg(primg, data);
//step1:使用这些索引,创建buffers指向 GPU 上输入和输出缓冲区
const ICudaEngine& engine = (* contextCathodeHead).getEngine();
assert(engine.getNbBindings() == 2);
//step2:分配buffers空间,为输入输出开辟GPU显存。Allocate GPU memory for Input / Output data
void* buffers[2];
const int inputIndex = engine.getBindingIndex(INPUT_BLOB_NAME);
const int outputIndex = engine.getBindingIndex(OUTPUT_BLOB_NAME);
CHECK(cudaMalloc(&buffers[inputIndex], channel * width * height*sizeof(float)));
CHECK(cudaMalloc(&buffers[outputIndex], classe * width * height * sizeof(float)));
step3:创建cuda流
cudaStream_t stream;
CHECK(cudaStreamCreate(&stream));
step4:从CPU到GPU----拷贝input数据
CHECK(cudaMemcpyAsync(buffers[inputIndex], data, channel * width * height * sizeof(float), cudaMemcpyHostToDevice, stream));
step5: 启动cuda核计算
(*contextCathodeHead).enqueue(1, buffers, stream, nullptr);
step6:从GPU到CPU----拷贝output数据
CHECK(cudaMemcpyAsync(prob, buffers[outputIndex], classe *width * height * sizeof(float), cudaMemcpyDeviceToHost, stream));
cudaStreamSynchronize(stream);
step7:获取Mat格式的输出结果,并调整尺寸
float* mask = prob;
dst = cv::Mat(height, width, CV_8UC1);
uchar* ptmp = NULL;
for (int i = 0; i < height; i++)
{
ptmp = dst.ptr<uchar>(i);
for (int j = 0; j < width; j++)
{
float* pixcel = mask + i * width + j;
if (*pixcel > CONF_THRESH)
{
ptmp[j] = 255;
}
else
{
ptmp[j] = 0;
}
}
}
cv::resize(dst, dst, src.size(), INTER_NEAREST);
step8:释放资源
cudaStreamDestroy(stream);
CHECK(cudaFree(buffers[inputIndex]));
CHECK(cudaFree(buffers[outputIndex]));
delete prob;
delete data;
}
4. 输出结果