1.面阵工业相机与线阵工业相机
1.1 基本概念区别
面阵相机则主要采用的连续的、面状扫描光线来实现产品的检测;
线阵相机即利用单束扫描光来进行物体扫描的工作的。
1.2 优缺点
(1)面阵CCD工业相机:
优点:应用面较广,如面积、形状、尺寸、位置,甚至温度等的测量。面阵CCD的优点是可以获取测量图像直观,二维图像信息。
缺点:像元总数多,而每行的像元数一般较线阵少,帧幅率受到限制,单个面阵的面积很难达到一般工业测量对视场的需求。
(2)线阵工业相机
优点:它的传感器只有一行感光元素,因此使高扫描频率和高分辨率成为可能。被检测的物体通常匀速运动 , 利用一台或多台相机对其逐行连续扫描 , 以达到对其整个表面均匀检测。另外线阵相机非常适合测量场合,这要归功于传感器的高分辨率 , 它可以准确测量到微米。
缺点:两方面的要求导致用线阵获取图像有以下不足,图像获取时间长,测量效率低;由于扫描运动及相应的位置反馈环节的存在,增加了系统复杂性和成本;图像精度可能受扫描运动精度的影响而降低,最终影响测量精度。
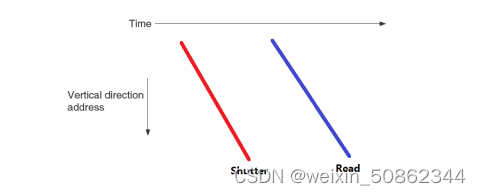
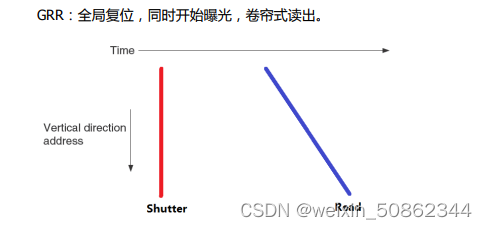
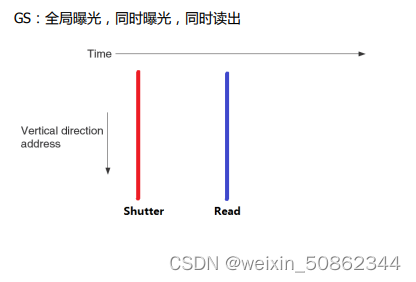
2. 快门模式
电子有三种快门模式,分别为 ERS(卷帘快门)、GRR(全局复位)、GS(全局曝光)。
3.靶面尺寸
4.传感器类型
5.触发
相机支持二种输出模式,即连续和触发模式,触发是一种被动模式,在触发模式下,相机进入准备状态,当触发信号产生后,相机立即开始曝光,然后输出图像,触发一般用在对实时性要求较高的场合,比如抓拍高速运动的物体。
5.1软触发
触发信号可以由软件产生,称为软件触发
5.2 硬触发
由外部硬件(机械开关/电子传感器/PLC/单片机/IO 卡)产生,称为硬件触发。
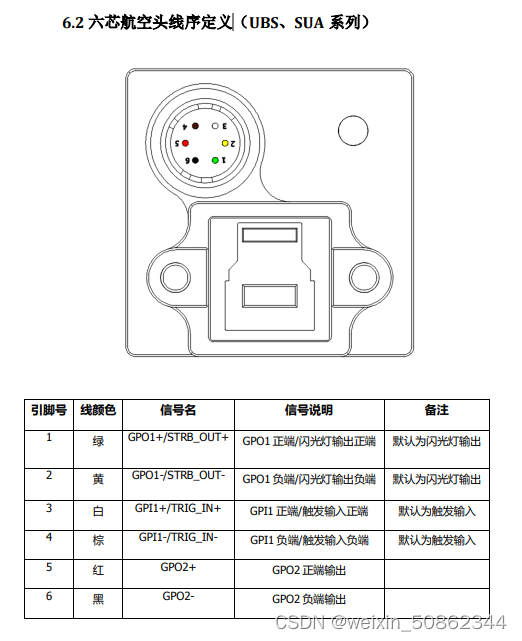
【六芯航空头线序定义】https://www.mindvision.com.cn/uploadfiles/2021/07/08/03150629885989680.pdf
6.核心参数
在了解相机相关设置参数之前,必须先要对相机的构成有一定的了解。
【推荐阅读】从CCM到sensor结构
尤其是sensor部分,在这里只做简单介绍
6.1 图像传感器 sensor
- 分类 : CCD Sensor和CMOS sensor。基本是CMOS sensor为主。
- 作用:sensor是摄像头的核心,负责将通过Lens的光信号转换为电信号,再经过内部AD转换为数字信号。
6.2 gain增益
6.2.1 模拟增益(analog_gain) & 数字增益(digital_gain)
- 误差分析
例子参考:《摄像头 —— 模拟增益和数字增益》
(1)模拟增益(analog_gain)带来的噪声
用数据来说明:2.4 和3.1,数字量化后为2和3.但假如模拟增益2x,则为4.8和6.2,量化后为5和6。这就是模拟增益带来的噪声。但模拟增益带来的噪声只会一次引入。不会多次级联引入。
(2) 数字增益(digital_gain)带来的噪声问题会多次级联引入。
比如信号原先为2.4和3.1,信号差为0.7。但数字化后变为2和3,经过2倍后变为4和6这就是数字增益带来的噪声。8x后就是16和24.而实际上模拟噪声8x也就是才2.48和3.18,数字量化后为19和25.