目录
一、在matlab中实现A*算法
A*算法主要是在Dijkstra算法上增加了启发式搜索功能,其表达式可以写成
,
其中g(n)表示当前点的cost,h(n)表示对终点的预测,这个预测可以用0、1、2和∞范数,但L1范数(曼哈顿/出租车距离)无法保证其最优性。其算法流程可以用下图表示:

那么在代码中该如何实现呢?本节作业主要是完成A_star_search.m,在随机的地图中生成一条安全的A*路径。
首先最先想到的是我们要有一张地图,那么需要有一定的长度和宽度(二维)、离散的障碍物。因此我们定义一个地图,并设置起始点和终止点。
% Environment map in 2D space
% 生成地图
xStart = 1.0;%起始点横坐标
yStart = 1.0;
xTarget = 9.0;%目标点横坐标
yTarget = 9.0;
MAX_X = 10;%地图宽度
MAX_Y = 10;
map = obstacle_map(xStart, yStart, xTarget, yTarget, MAX_X, MAX_Y); % 返回障碍物出现的地方这个obstacle_map主要是生成地图上的障碍,当rand小于0.45并且不是起始点和终止点的时候产生障碍map点。
function map = obstacle_map(xStart,yStart,xTarget,yTarget,MAX_X,MAX_Y)
%This function returns a map contains random distribution obstacles.
rand_map = rand(MAX_X,MAX_Y);
map = [];
% 第一个障碍物为起点
map(1,1) = xStart;
map(1,2) = yStart;
k=2;
% 地图中的障碍物比例
obstacle_ratio = 0.45;
for i = 1:1:MAX_X
for j = 1:1:MAX_Y
if( (rand_map(i,j) < obstacle_ratio) && (i~= xStart || j~=yStart) && (i~= xTarget || j~=yTarget))
map(k,1) = i;
map(k,2) = j;
k=k+1;
end
end
end
% 最后一个障碍物为终点
map(k,1) = xTarget;
map(k,2) = yTarget;
end然后就需要执行生成A*路径的算法了:
% Waypoint Generator Using the A*
% 路径搜索
path = A_star_search(map, MAX_X,MAX_Y);其中在A*寻找这个函数中,首先将障碍物、目标和起始点进行定义:Obstacle=-1, Target = 0, Start=1,并将这个地图乘以一个系数k。根据A*算法伪代码,需要维护两个数组,一个是oprn list,一个是clsed list,其中第一步要将所有障碍物加入closed list:
%Put all obstacles on the Closed list
% 将障碍物加入close list
k=1;%Dummy counter
for i=1:MAX_X
for j=1:MAX_Y
if(MAP(i,j) == -1)
CLOSED(k,1)=i;
CLOSED(k,2)=j;
k=k+1;
end
end
end之后的功能主要是维护OPEN这个数组,将数组里的数弹出比较,直到扩展到目标节点,生成path

以 10X10的地图为例,最后的效果如下:
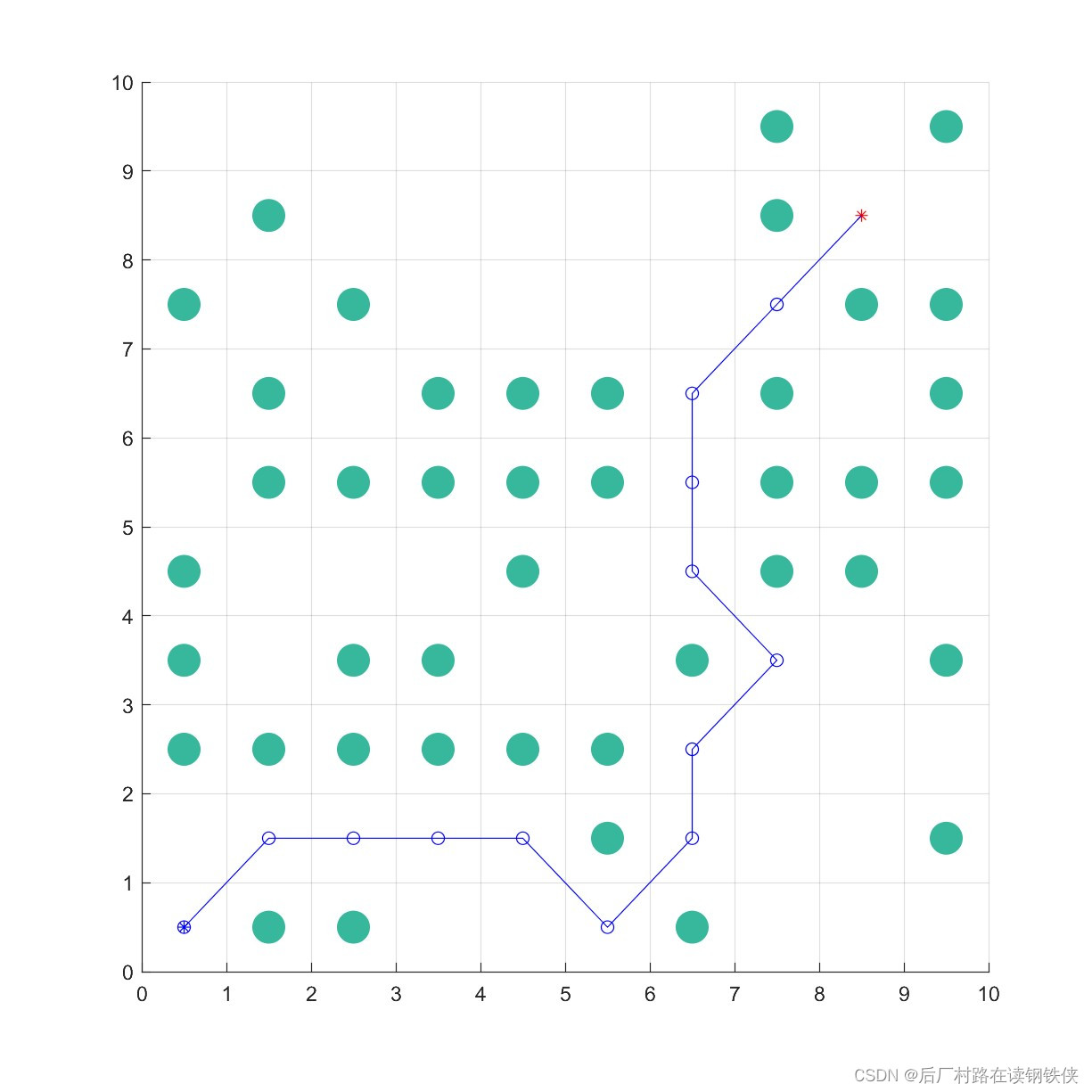
在生成地图的过程中,因为障碍是随机生成的,可能并没有路径出现。此外,A*算法扩展效率慢,当地图变大的时候,效率很低,计算耗时很大。
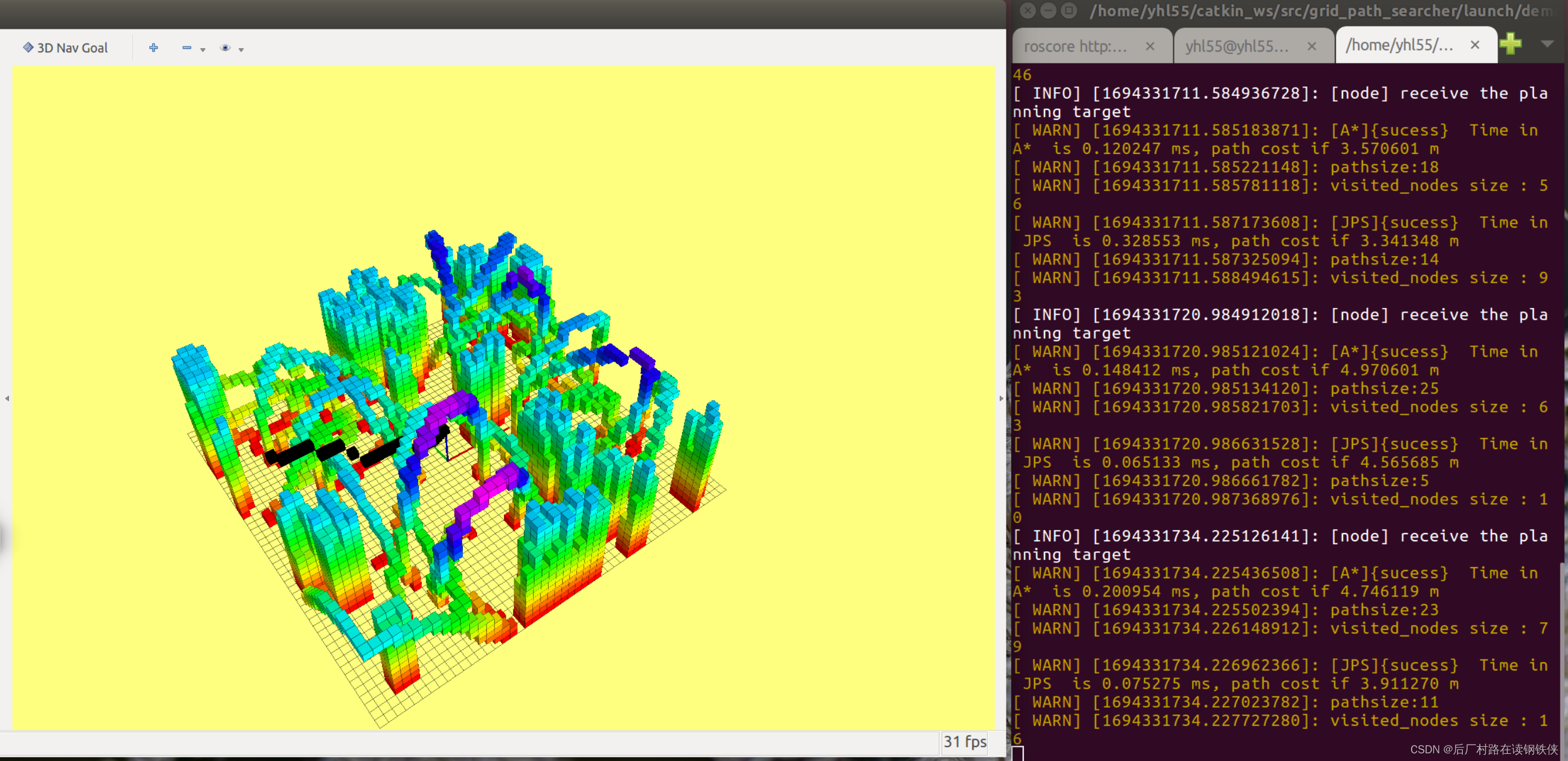
二、在ROS环境中实现JPS和A*对比
实验结果如下,具体步骤参考第一章流程:深蓝路径规划作业-第一章