#!/usr/bin/env python
# -*- coding: utf-8 -*-
import cv2
import os
import numpy as np
def laplacian(img, ksize=3):
laplacian = cv2.Laplacian(img, cv2.CV_16S, ksize=ksize)
dst = cv2.convertScaleAbs(laplacian)
cv2.imshow('laplacian', dst)
def scharr(img):
x = cv2.Sobel(img, cv2.CV_16S, 1, 0, ksize=-1)
y = cv2.Sobel(img, cv2.CV_16S, 0, 1, ksize=-1)
Scharr_absX = cv2.convertScaleAbs(x) # convert 转换 scale 缩放
Scharr_absY = cv2.convertScaleAbs(y)
result = cv2.addWeighted(Scharr_absX, 0.5, Scharr_absY, 0.5, 0)
cv2.imshow('img', img)
cv2.imshow('Scharr_absX', Scharr_absX)
cv2.imshow('Scharr_absY', Scharr_absY)
cv2.imshow('result', result)
def sobel(img):
x = cv2.Sobel(img, cv2.CV_16S, 1, 0) # 1,0代表只计算x方向计算边缘
y = cv2.Sobel(img, cv2.CV_16S, 0, 1) # 0,1代表只在y方向计算边缘
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
dst = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)
cv2.imshow("absX", absX)
cv2.imshow("absY", absY)
cv2.imshow("Result", dst)
def canny(img):
blur = cv2.GaussianBlur(img, (3, 3), 0) # 用高斯滤波处理原图像降噪
canny = cv2.Canny(blur, 50, 120) # 50是最小阈值,150是最大阈值
# cv2.imshow('canny', canny)
return canny
img_folder = "./images_ganfeng/008"
def all_img():
img_paths = os.listdir(img_folder)
for img_path in img_paths:
img_path = os.path.join(img_folder, img_path)
print(img_path)
img = cv2.imread(img_path, 0)
# sobel(img)
# scharr(img)
# laplacian(img, 3)
canny(img)
cv2.imshow("src", img)
cv2.waitKey(0)
cv2.destroyAllWindows()
def get_mask(srcImg, points):
mask = np.zeros(srcImg.shape, dtype=np.uint8)
for point in points:
point = np.array(point)
roi_points = []
roi_points.append(point.astype(np.int32))
cv2.polylines(mask, roi_points, True, (0, 0, 0))
cv2.fillPoly(mask, roi_points, (255, 255, 255))
# cv2.imshow("mask", mask)
# cv2.waitKey(0)
return mask
img_path = "./images2/size1side1/size1side1_000180.png" # size1side1_000158 size1side1_000119
img_path = "./images_ganfeng/008/008_000054.png" # 001_000119.png
roi_points = [[[92, 495], [711, 177], [717, 266], [76, 568]],
[[71, 570], [679, 608], [644, 684], [33, 612]],
[[60, 784], [640, 1201], [471, 1196], [12, 899]]]
def single_img():
img = cv2.imread(img_path, 0)
color_img = cv2.imread(img_path)
mask = get_mask(img, roi_points)
# sobel(roi)
# scharr(roi)
# laplacian(roi, 3)
edge = canny(img)
roi = cv2.bitwise_and(edge, mask)
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (5, 5))
roi = cv2.morphologyEx(roi, cv2.MORPH_CLOSE, kernel)
contours_area = []
contours, hierarchy = cv2.findContours(roi, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for i, contour in enumerate(contours):
area = cv2.contourArea(contour)
contours_area.append([area, i])
contours_area.sort(reverse=True)
print(contours_area)
ret_contours = contours_area[:8]
print(ret_contours)
ret_mask = np.zeros(img.shape, dtype=np.uint8)
for ret_contour in ret_contours:
cv2.fillPoly(ret_mask, [contours[ret_contour[1]]], (255, 255, 255))
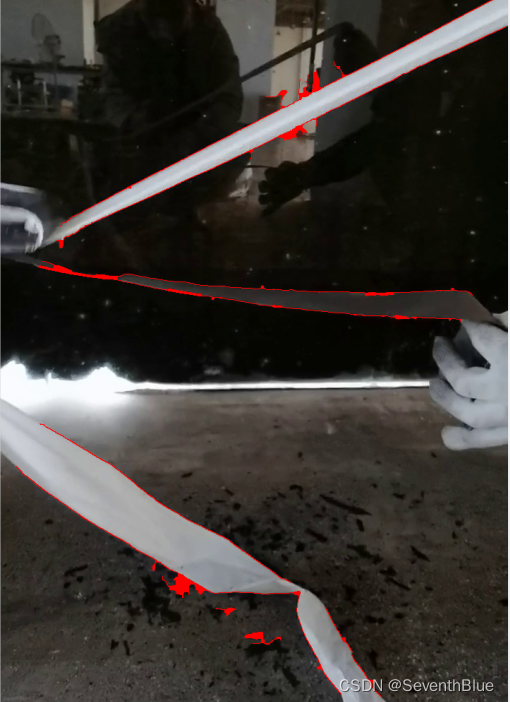
cv2.fillPoly(color_img, [contours[ret_contour[1]]], (0, 0, 255))
cv2.imshow("roi_1", edge)
cv2.imshow("roi_2", roi)
cv2.imshow("color_img", color_img)
cv2.imshow("ret_mask", ret_mask)
cv2.waitKey(0)
cv2.destroyAllWindows()
cv2.imwrite("edge.png", color_img)
def main():
# all_img()
single_img()
if __name__ == "__main__":
main()