OSQCreate():
创建消息队列函数。 有四个入口参数:消息队列指针;消息队列名称;消息队列大小(不能为0);返回错误类型。
函数过程:①首先进行安全检查,非法调用检查以及参数检查等。参数检查一般是检查入口参数是否非法,比如创建队列为空,消息队列大小为0等等,如果存在,则return;返回并停止运行。②然后依次给消息队列结构体中元素赋初值。因为在OSQCreate()创建消息队列之前,仅仅是定义了一个消息队列的结构体,然后编译器为此结构体分配了一块内存,需要通过OSQCreate()进行一系列检查并赋值。首先标记创建的数据结构类型为消息队列;标记消息队列的名称;初始化消息列表;初始化等待列表;如果使能了调试代码和变量,将该队列添加到消息队列双向调试链表。③创建成功,消息队列个数加1,退出临界段,返回无错误。
类型标识符:标记创建对象数据结构为消息队列,即给消息队列的类型参数赋值。是通过 (OS_OBJ_TYPE)CPU_TYPE_CREATE('Q', 'U', 'E', 'U')进行的。CPU_TYPE_CREATE()类型函数有四个参数,都是8位的字符型变量,这个函数通过移位,比如第一个参数移0位,第二个参数移8位...以此类推,然后通过OS_OBJ_TYPE强制转换成32位整型变量,达到独一无二类型标识符的目的。
初始化消息列表结构体:OS_MsgQInit(&p_q->MsgQ, max_qty)。因为是新定义了一个消息队列,只分配了一个内存区域给它,在初始化时,只会赋予它名字、大小,数据结构标识符。其他内存区域因为没有消息,里面的内容应该为空或者初始化为0。所以在初始化消息列表结构体时,只会赋予消息队列的大小(队列中允许的最大消息个数),其余指向消息的指针因为没消息指向为NULL,当前消息个数和队列中的消息个数峰值都赋值为0。
初始化等待(阻塞)列表结构体:OS_PendListInit(&p_q->PendList)。一开始等待列表中时没有等待的任务的,所以指针赋值为NULL,变量赋值为0。(因为等待列表是包含在消息队列结构体中的,所以每个消息队列都独占一个等待列表)。
}
{
OSQDel():
消息队列删除函数。队列删除函数是根据队列结构(队列句柄)直接删除的,删除之后这个消息队列的所有信息都会被系统清空,而且不能再次使用这个消息队列了。想要使用消息队列删除函数就必须将OS_CFG_Q_DEL_EN 宏定义配置为 1。
函数实现过程:
OSQDel()函数的入口参数有三个:消息队列指针;选项;返回错误类型。返回值为等待列表中任务数。
① 函数首先进行安全检查、参数检查等,参数检查中不仅对指向操作对象(消息队列)的指针进行了检查,对选项这个参数也进行了检查,主要是判断选项是否超出预期。然后检查操作对象的数据类型是否为消息队列类型。② 然后根据选项分类操作:对待选项OS_OPT_DEL_NO_PEND,表示需要在没有任务等待该队列时删除队列,所以用if-else进行判断,如果没任务就调用函数OS_QClr()清除该队列内容,消息队列数量减1;如果有任务则让错误类型为“有任务在等待该队列”,退出。③ 对待选项OS_OPT_DEL_ALWAYS,表示不管有无任务在等待该消息队列,都删除。所以根据任务数,用一个循环,首先删除等待列表中任务(通过调用OS_PendObjDel()),然后调用函数OS_QClr()清除该队列内容。注意:如果使能了调试代码和变量,在删除消息队列前,需要将该消息队列从调试列表中移除。
注:一般是在没有任务在等待该消息列表是删除,即在OS_OPT_DEL_NO_PEND选项下删除消息队列。
-调用OS_PendObjDel():
将阻塞在内核对象(如信号量)上的任务从阻塞态恢复。这个函数只是为删除等待列表中的一个任务而封装起来的。为了删除等待列表中全部任务,应该配合while循环
该函数有三个参数:指向任务控制块的指针;时间戳;指向os_pend_obj目标等待结构体的指针,在这个函数中,指删除对象的类型。因为被删除对象的类型有消息队列、信号量、互斥量、事件等,每一个对象的结构体元素都不尽相同,所以需要强制转换指针变量。指针变量是按照指针类型对所指向的内存进行解析,所以可以判断这些对象结构体元素的排版都差不多,只不过是最后多了或者少了些元素,不然指针强制转换后无法根据类型解析内存。
函数实现过程:既然要从等待列表中删除任务,就要根据任务的状态分类操作,用多分支判断语句switch和case。与等待无关的状态,比如就绪、延时、挂起状态,则退出,不进行删除;这只是进行一个检查,害怕用户调用此函数删除不处于等待阻塞态的任务。等待的任务状态分为OS_TASK_STATE_PEND、OS_TASK_STATE_PEND_TIMEOUT,OS_TASK_STATE_PEND_SUSPENDED、OS_TASK_STATE_PEND_TIMEOUT_SUSPENDED。
前两个分别是任务无限期等待和任务超时等待,如果任务在等待多个信号量或消息队列,强制接触任务对某一对象的等待;复位任务的消息域(指向消息的指针)和消息大小;然后调用OS_PendListRemove()将任务从等待列表中移除,如果是等待超时状态,要把任务从时基列表中移除;然后添加进就绪列表;最后修改任务的状态和标记。
后两个状态是任务在等待中被挂起和任务在超时等待中被挂起。其实和上面两个操作步骤差不多,只是从等待列表中删除后,前两个任务的状态变为就绪态,后两个任务的状态变为挂起态。所以其实可以把公共部分提出来,优化代码。
}
{
OSQPost():消息队列发送函数。
任务或者中断服务程序都可以给消息队列发送消息。当发送消息时,如果队列未满,就说明运行信息入队;uCOS 会从消息池中取出一个消息,挂载到消息队列的末尾(FIFO发送方式);如果是 LIFO 发送方式,则将消息挂载到消息队列的头部;然后将消息中MsgPtr 成员变量指向要发送的消息(因为消息池在初始化时并没有指定消息指向,使用指针不仅是为了指向不定长的消息,也是为了在运行过程中,灵活指向用户要发送的消息),如果系统有任务阻塞在消息队列中,那么在发送了消息队列的时候,会将任务解除阻塞。
函数入口参数:消息队列指针;消息指针;消息大小;选项;返回错误类型。(消息指针之所以为void*类型是因为消息可以是char*,也可以是int*等)
函数实现过程:首先进行安全检查和参数检查,参数检查中包括选项检查,主要检查选项是否符合超出预期,符合预期的才进行下面操作。
符合预期的选项有:OS_OPT_POST_FIFO /* (默认)采用 FIFO 方式发送 */
OS_OPT_POST_LIFO /*采用 LIFO 方式发送消息*/
OS_OPT_POST_1 /*将消息发布到最高优先级的等待任务*/ (这个选项没检查)
OS_OPT_POST_ALL /*向所有等待的任务广播消息*/
OS_OPT_POST_NO_SCHED /*发送消息但是不进行任务调度*/
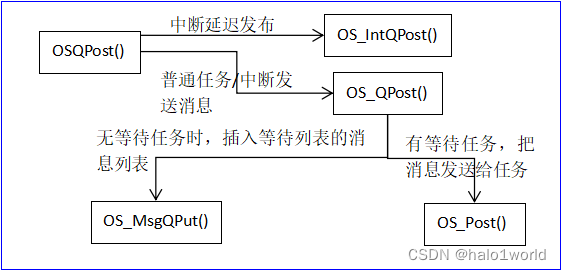
然后进行类型检查,检查对象是否为消息队列类型。然后进行消息的发送。这里要注意的是:中断服务程序发送消息。因为存在中断延迟发布的情况,使得原本在中断中发布的信息变成任务级发布,所以如果使能了中断延迟发布,并且发送消息的函数是在中断中被调用,此时就不该立即发送消息,而是将消息的发送放在指定发布任务中,此时系统就将消息发布到租单消息队列中,等待到中断发布任务唤醒再发送消息(调用OS_IntQPost())。如果不是中断延迟发布,就直接调用OS_QPost()函数进行消息的发送。
-调用OS_QPost():
此函数在OSQPost()中被调用,主要是封装来实现消息的发送功能的函数。此函数是uC/OS-III的内部函数,用户的应用程序不应该调用它。发送消息时我们调用OSQPost()即可。此函数有六个入口参数:消息队列指针;消息指针;消息大小;选项;消息被发布时的时间戳;返回错误类型。虽然该函数是void类型,没有返回。但是因为入口参数中有个指针变量,用来保存返回的错误信息,所以可以认为是函数的出口参数。
这里要熟悉消息队列的运作方式:任务或者中断服务函数给消息队列发送消息,消息队列没满则FIFO或者LIFO入队,如果满则返回错误;但是如果有任务在等待任务或中断服务函数发送消息给消息队列,则不会将消息入队(因为没必要入了队马上又出队),直接将消息发送给等待列表中的最高优先级的任务,如果选择了OS_OPT_POST_ALL,那么就要广播把消息发送给等待列表中的所有任务。(重要)
函数过程:该函数也确实按照消息队列的运作方式编写。首先获取该队列的等待列表,然后用if语句进行判断。① 如果没有任务在等待该队列的消息,把任务或中断服务程序发过来的消息按照LIFO,FIFO插入到消息队列中,调用函数OS_MsgQPut()。② 如果有任务在等待该队列的消息,那么根据选项和OS_OPT_POST_ALL相与,判断需不需要把消息发送给等待列表中的所有任务。如果需要,则获取等待列表中任务数,逐个发送;如果不需要,就获取等待列表中头部任务,因为等待列表是按照优先级排的任务,把消息发送给他;把消息发送给等待中的任务时调用函数OS_Post()。③ 最后判断选项有没有选择OS_OPT_POST_NO_SCHED,如果没选择“发布完不调度任务” ,则调用OSSched()进行任务切换。(这里是可选调度???不是说任务状态改变,就要调用此函数???)(解释,任务调用此函数把消息发送给消息队列时,任务自身状态没有变,并没有被挂起或者延时阻塞,任务执行并没有被打断,所以不需要调用切换函数。所以是可选项。相当于任务切换函数切换到该任务运行,只不过该任务中调用了发送消息给消息队列的函数,任务没有被打断,没进入阻塞状态,不需要切换任务,来提高CPU利用率。应该让该任务执行完或者进入阻塞状态再切换)(之所以可选,是因为,可能存在某个任务急需这个消息,(而且刚好任务在等待列表中获取到消息解除阻塞)为了减少任务等待时间,所以进行切换。特别地,在释放信号量中,该选项更重要。因为信号量如果作为同步或者保护资源来用,立即切换,可以减少同步的延迟或者优先级反转的时间)。
--调用OS_MsgQPut():
这个函数是封装起来,用来将消息进入到消息队列的消息列表中。
六个入口参数:消息列表指针;消息指针;消息大小;选项;消息发布时的时间戳;返回错误类型。
函数过程:① 除了安全检查外,还需要通过检查消息列表中消息个数判断消息队列是否已满,再判断消息池中是否有可用消息。② 检查后,从消息池中获取一个消息。(从消息池获取一个消息就是取走一个消息,取走的是消息池的第一个消息,保存第一个消息后,使管理消息池的指着指向第二个消息;消息池可用消息数减 1;消息池被用消息数加 1;更新消息被用最大数目的历史记录,如果被用最大数目小于被用消息数,则NbrUsedMax = NbrUsed)③ 将获取的消息插入到消息队列的消息列表中(分为三种情况:如果是空队列,那么插入的结点既是队头指针也是队尾指针。如果不是,是FIFO模式,就是把结点插入到队尾,根据“结点指针有变化先保存”的原则,先保存消息列表中的队尾结点指针,然后修改指针指向。如果是LIFO模式,就把结点插入到队头,修改消息列表的OutPtr和消息指针)。④ 更新消息列表历史最大消息数。⑤ 取出来的消息是初始化的消息,需要给消息赋值,添加消息内容,消息大小,发送消息时的时间戳。最后返回无错误信息。
发现的结论:uCOS的链表,都有一个管理结点的结构体用指针连接在一起,并且管理结构体中通常有链表结点个数的变量,有时还不止一个,包括最大数量,目前结点数量等。就比如消息池,消息池中的消息时结构体,通过指针连接为单链表,然后有个管理消息池的全局的结构体,该结构体有两个指针,一个指向消息池的头部消息,一个指向消息池的尾部消息,还有表示消息数量的变量。
总结:消息池中的消息初始化后是为空的,只是串成链表形式,方便消息的管理和存取;在任务调用函数OSQPost()往消息队列发送消息时,从消息队列取出消息,在插入到消息队列的消息列表中时,需要给消息赋值(消息内容,消息大小,发送时间戳)。任务发送消息,并不是先存储到消息池,再赋值给消息列表的;而是直接从消息池取出初始化为NULL(0)的消息,先插入到消息列表中,再给消息赋值。
--调用OS_Post():
这个函数是封装起来,任务发送消息给消息队列,若消息队列中有任务在等待消息,则不进入队列,直接把消息发送给消息队列中等待列表中的任务。
五个入口参数:内核对象类型指针(这里就把消息队列指针强制转化为OS_PEND_OBJ);任务控制块(是指在消息队列中等待列表的任务);指向消息的指针;消息大小;时间戳。
函数过程:对于涉及任务的函数,一定要检查任务的状态,根据任务的状态分类操作。① 用switch--case多分支选择语句进行任务的判断,只对四个等待状态OS_TASK_STATE_PEND和OS_TASK_STATE_PEND_TIMEOUT,OS_TASK_STATE_PEND_SUSPENDED(无限期等待被挂起)和OS_TASK_STATE_PEND_TIMEOUT_SUSPENDED(超时等待被挂起)进行操作。② 任务处于无期限等待状态或者是有期限等待状态:如果任务在等待多个信号量或消息队列,就调用 OS_Post1()函数标记一下是哪个内核对象进行发布(释放)操作。如果不是,保存消息指针和消息大小和时间戳到任务控制块(相当于任务获得该消息!!!);把任务从等待列表中移除,调用函数OS_PendListRemove();如果使能了调试代码和变量,调用OS_PendDbgNameRemove()移除内核对象的调试名;注意,如果是超时等待,因为设置有延迟时间,会把任务送进时基列表中,这里也要一并移除;最后将任务插入就绪列表中,修改任务状态位就绪态,清除等待标志,标记不再等待。③ 对于无限期/有限期等待被挂起的状态,步骤与②相差不太,都需要把消息发送给任务,发送成功后把任务从等待列表中移除,如果有延时之类的,从时基列表中移除,只是最后修改任务的状态为挂起态。
总结消息队列发送函数:任务要发送消息给消息队列,调用函数OSQPost()即可。只不过为了优化程序结构,该函数中封装了很多小函数用来一起完成功能,OSQPost()调用关系如下图。
}
{
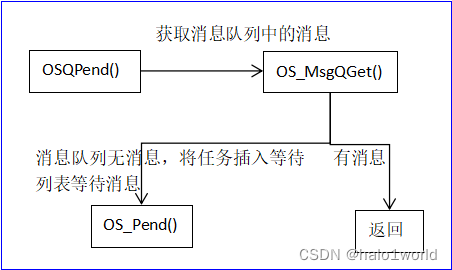
OSQPend():消息队列获取函数
当任务试图从队列中的获取消息时,用户可以指定一个阻塞超时时间,当且仅当消息队列中有消息的时候,任务才能获取到消息。在这段时间中,如果队列为空,该任务将保持阻塞状态以等待队列消息有效。当其他任务或中断服务程序往其等待的队列中写入了数据,该任务将自动由阻塞态转为就绪态。当任务等待的时间超过了用户指定的阻塞时间,即使队列中尚无有效消息,任务也会自动从阻塞态转为就绪态。当然,可以不设置等待时间,让它一直等待,直到等到消息,设置timeout参数为0即可。
注意读取流程:任务从消息队列中获得消息,如果消息队列中的消息列表中有消息,则任务不进入消息队列的等待列表,直接获得消息;如果消息列表中没有消息,则需要把任务插入到等待列表中等待消息。
六个函数参数:消息队列指针(要读取哪个队列的消息);等待时间(单位是时钟节拍);选项;返回消息大小;获取等到消息时的时间戳;返回错误类型。
函数返回:指向消息的指针。
函数过程:① 安全检查、中断中非法调用检查、参数检查、对象类型检查。注意,安全检查和中断中非法调用检查是默认禁止的,其中安全检查只提供了函数入口,需要自己编写程序实现。参数检查包括消息队列是否为空,用于保存返回的消息大小指针是否为空(没定义)。这里的选项检查并不是要进行什么特殊操作,选项OS_OPT_PEND_BLOCKING,OS_OPT_PEND_NON_BLOCKING是是否要阻止队列为空的意思。② 调用OS_MsgQGet()从消息队列中获取消息,如果获取成功则直接返回,不需要将任务插入到等待列表。 ③ 如果消息列表中没有消息,任务就需要送入等待列表,任务就需要进入等待阻塞,如果此时用户选项为OS_OPT_PEND_NON_BLOCKING,则返回错误“等待渴望阻塞”,并return返回。④ 如果选择的是阻塞任务,判断调度器是否被其他函数锁住,调度器被锁意味着不允许其他函数对任务进行操作,所以需要返回错误“调度器被锁”,并返回。如果没有,则该函数调用OS_CRITICAL_ENTER_CPU_EXIT()锁住调度器,因为接下来要费时间把任务添加进时基和等待列表,不允许在这段时间内其他任务获得CPU控制权,打断该过程的进行。然后调用函数OS_Pend(),将任务插入到等待和时基列表(看是否超时等待)。⑤ 调用OSSched(),进行任务切换,因为该任务等待阻塞了,相当于延时阻塞,为了高效率利用CPU,在等待消息的这段时间里,应该把控制权交给其他任务。⑥ 差点以为切换后,就应该执行其他任务了,后面就不应该写代码了???错误。想想任务阻塞延时,任务调用延时函数后,在延时阻塞函数中除了设置任务的延时时间外,还会切换任务,但是任务时间到了,会重新进入就绪列表,等轮到该优先级任务时,重新返回现场执行该任务。所以切换后,要考虑该任务是否还需要执行什么操作,因为会保护现场,当再一次切换到该优先级的任务下时,从之前切换断开的位置处继续执行。所以这里切换后还需要做什么操作吗?想一想,当os再次切换到该任务,从这里执行时,是不是意味着,任务已经从时基列表和等待列表中移除,只有移除后,才能重新进入就绪列表,重新被调度;那么是不是意味着任务已经获得了消息,或者等待时间都过了还没有获得消息,自动转为的就绪态。那么是不是接下来应该根据任务状态判断看返回什么信息,而且,因为函数有返回值,切换后至少应该写一个return xx之类的,才不会报错。⑦ 如果控制块状态为正常:OS_STATUS_PEND_OK,就应该把消息队列中消息列表的消息给任务,包括返回消息大小和时间戳。状态为等待被终止:OS_STATUS_PEND_ABORT,那么返回消息应该为空,获取等待被终止时的时间戳和错误类型。状态为等待超时:OS_STATUS_PEND_TIMEOUT,返回内容为空,获取等待超时的时间戳和错误类型。状态为等待的内核对象被删除:OS_STATUS_PEND_DEL,返回内容为空,获取对象被删除的时间戳和错误类型。其他状态,不符合预期,返回内容为空,返回状态非法错误类型。
-调用OS_MsgQGet():
调用OS_MsgQGet()从消息队列中获取消息,如果获取成功则直接返回,不需要将任务插入到等待列表。
4个入口参数:消息列表的指针;返回消息大小的指针;返回时间戳指针;返回错误类型指针。
返回值:指向消息的指针。
函数实现过程:情况无非分为两种:一是消息队列的消息列表中没有消息,那么返回空消息;一种是有消息,那么就返回消息,更新消息队列的指针。这里需要注意的是,消息是从消息池中取出插入到消息队列的消息列表中的,那么任务从消息队列中读走消息后,消息应该重新返回消息池,以便重复利用(插入消息池的头)(这里消息返回消息池时不需要清空是因为在任务调用函数OSQPost()发送消息给消息队列,重新从消息池取消息时,是会赋值给消息的,不管以前消息是空还是有只,都会重新更新内容)。① 首先进行安全检查,这里不需要参数检查,是因为该函数是在OSQPend()被调用,在OSQPend()已经对这些参数进行了检查。② 如果消息队列中消息列表没有消息,则返回空消息及大小,错误类型为队列无消息,时间戳清0。③ 如果消息队列有消息,让消息列表中的消息出队,修改消息列表管理结构体的指向队头的指针(出队指针)。注意,不管是FIFO还是LIFO模式,出队的消息都是从队头删除。消息出队后,要注意队列中还有无消息,如果没有消息,需要清0消息列表管理结构体的指向队尾的指针(入队指针)以及清0消息数;如果还有消息,则把消息数减1即可。④ 把消息释放回消息池。任务从消息池取消息时,是从管理消息池结构体指向的第一个开始取的,把消息释放回消息池,也应该是把他插入到管理消息池结构的后面。取出和插入都是从头开始。所以这里按照这个思路修改指针,就是单链表插入操作,修改两个指针,注意指针修改的先后顺序。消息池可用消息数加1,已用消息数减1。
-调用OS_Pend():
如果消息列表中没有消息,调用函数OS_Pend(),将任务移出就绪列表并插入到等待列表和(时基列表(看是否超时等待))。
4个入口参数:指向OS_PEND_DATA结构体的指针;指向OS_PEND_OBJ内核对象的指针(这里把指向消息队列的指针强制类型转换);任务等待状态(这里赋值为任务在消息队列中等待);等待节拍数timeout。
函数过程:① TCB中包含两个等待的状态变量。所以赋值PendOn表示正在等待哪种内核对象;PendStatus等待的状态,包括是否正常,被终止,超时等。② 调用OS_TaskBlock()阻塞当前任务运行,就是从就绪列表中删除,如果参数timeout不为0,就把任务插入时基列表中;并修改任务状态为等待或者超时等待。③ 插入消息列表的等待列表,分为两种情况:一是等待的消息队列存在。那么就获取消息队列的等待列表,注意等待列表中的数据结构是OS_PEND_DATA类型,这就是一个结构体,在插入之前,需要先定义一个,所以在该函数的入口参数中才会有“指向OS_PEND_DATA结构体的指针”,系统需要该结构体(只是模糊的知道需要,目前不知道具体需要这些元素干嘛????),该结构体中的元素主要包括有等待的任务TCB,指向任务内容和大小的指针,指向等待对象的指针,两个组成双链表的指针等等,所以不能简单将任务TCB插入进消息列表,需要定义一个这样的结构体。因为OS_Pend()是内部函数,这里被OSQPend()调用,在OSQPend()中已经定义了OS_PEND_DATA类型的局部变量pend_data,该变量作为OS_Pend()的入口参数,调用OS_PendDataInit()进行该结构体的初始化(一般元素数量多的结构体都编写一个函数进行结构体的初始化),然后调用OS_PendListInsertPrio()按照优先级将OS_PEND_DATA结构体插入等待列表中。④ 第二种情况是消息队列不存在,就要把TCB中用于指向等待列表中断元素指针PendDataTblPtr变为NULL((OS_PEND_DATA *)0),并清零任务的等待域数据PendDataTblEntries。
OS_Pend()应该在其他函数中也有调用,因为在消息队列获取函数OSQPend()调用该函数之前已经检查了消息队列是否为空,在不为空的条件下,且消息列表没有消息时,调用该函数将任务送入等待列表。