0. 前言
鉴于最近两年(2020,2021),隐式渲染(implicit rendering)技术非常火爆(以NeRF和GRAFFE为代表),而由于这种隐式渲染需要一点点渲染的基础,而且相较于正常的CV任务不是很好理解。为了方便大家学习和理解,我这里将以ECCV2020的NeRF(神经辐射场 NeRF: Neural Radiance Field)[1]为例,对其进行代码级(基于pytorch3d[3]的实现)的详细剖析,希望对需要的朋友有所帮助。
- 2022.12.23 更新
本篇博客只介绍了最基础的NeRF, 这几年有非常多的新工作陆续出来, 如果小伙伴有需要更系统、完善的的入门学习课程,推荐深蓝学院的专门课程: 神经辐射场(NeRF)系列分享
1. 什么是NeRF
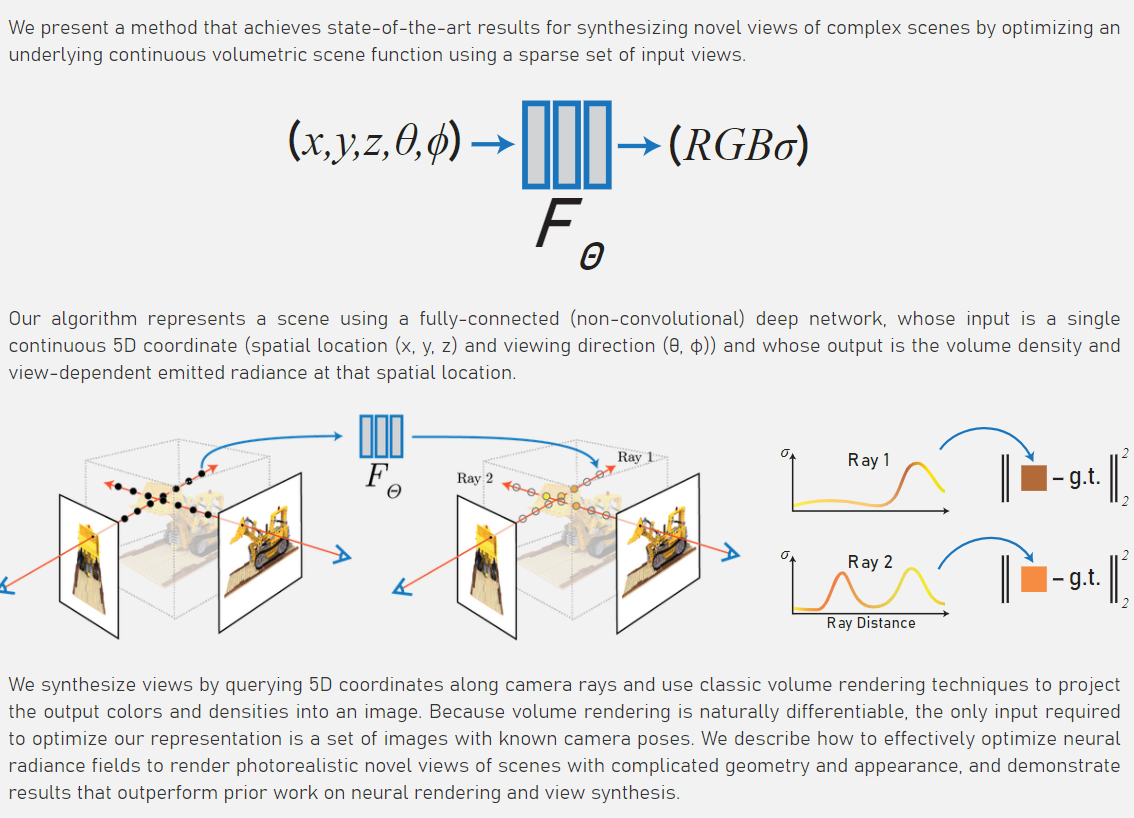
根据官方的项目[1], NeRF实质上就是构造一个隐式的渲染流程,其输入是某个视角下发射的光线的位置 o o o,方向 d d d以及对应的坐标 x , y , z x,y,z x,y,z。通过神经辐射场 F θ F_{\theta} Fθ, 得到体密度和颜色,最后再通过volumteric rendering渲染得到最终的图像。
关于通过位置,方向 d \mathbf{d} d和坐标 x \mathbf{x} x映射到体密度 σ \sigma σ和颜色 c \mathbf{c} c的方程,更formal的表达形式如下(来自nerf论文):

这里面涉及到了不少关于渲染相关的概念,比如说: 光线是什么鬼?怎么发射的?方向是什么?对于任意视角给定的图片,我们应该怎么去按照这个流程进行渲染呢?
下图来自图宾根大学的Geiger教授[2](他也是CVPR2021最佳论文的指导老师!), 以grid_sampler为例(这个grid_sampler后面会讲), 我们从图像的每个位置出发,发射一条光线ray: o + t d o + td o+td.
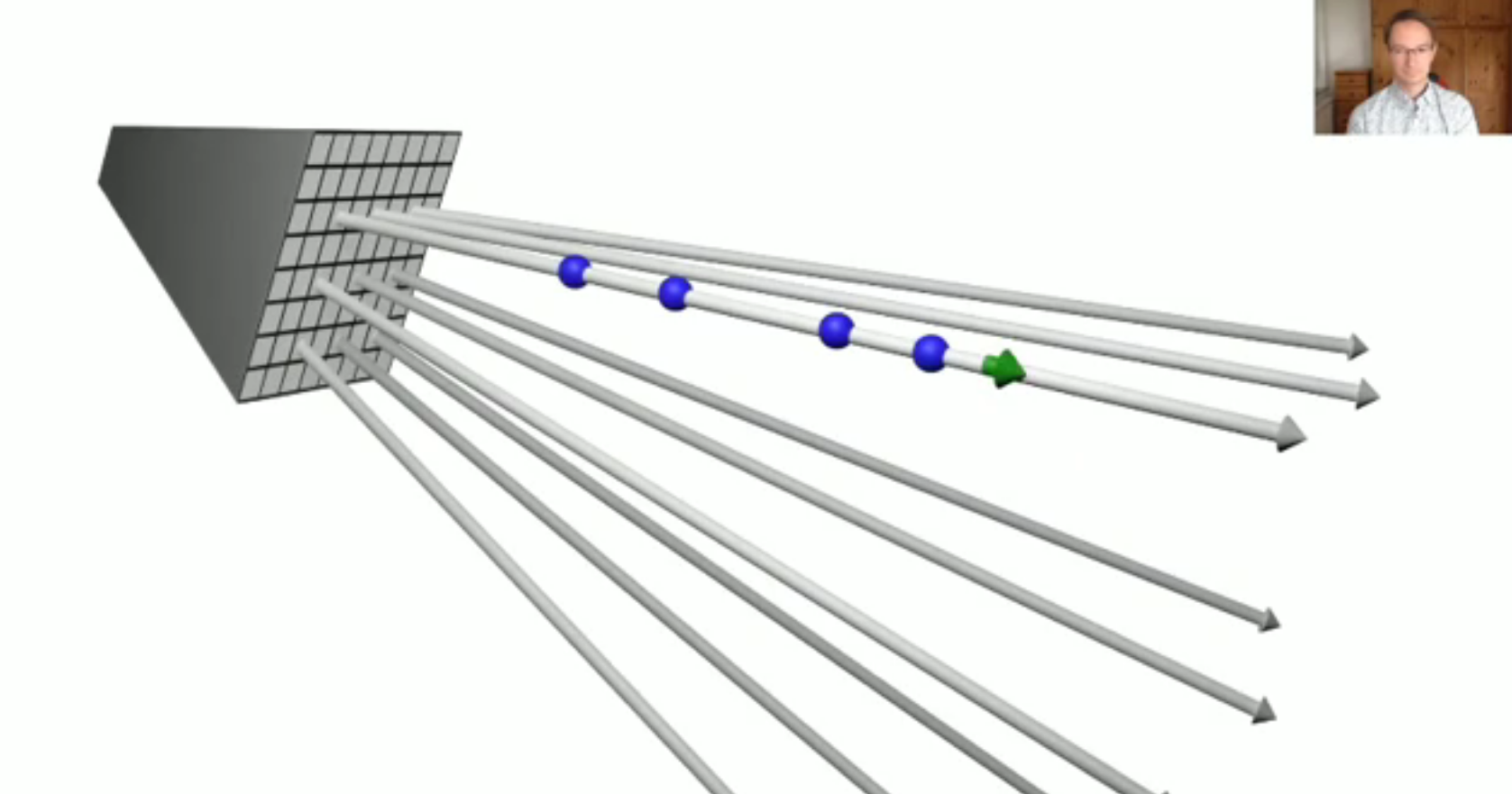
由上图可以看到,蓝色的小球(或如图[1]的黑色小球)就是我们在光线方向上,根据不同的 t t t(可以理解为深度)采样得到的点,最后输入网络的内容,其实就是经过位置编码 γ \gamma γ(positional encoding)的这些蓝色点的坐标 x , y , z x,y,z x,y,z以及方向 d d d。
接下来,经过神经辐射场 F θ F_{\theta} Fθ的处理,我们得到了每一个小球的颜色 c \mathbf{c} c和密度 σ \sigma σ(颜色已经不一样了~),那么根据体渲染(volumetric rendering)的机制,就可以进行渲染了。
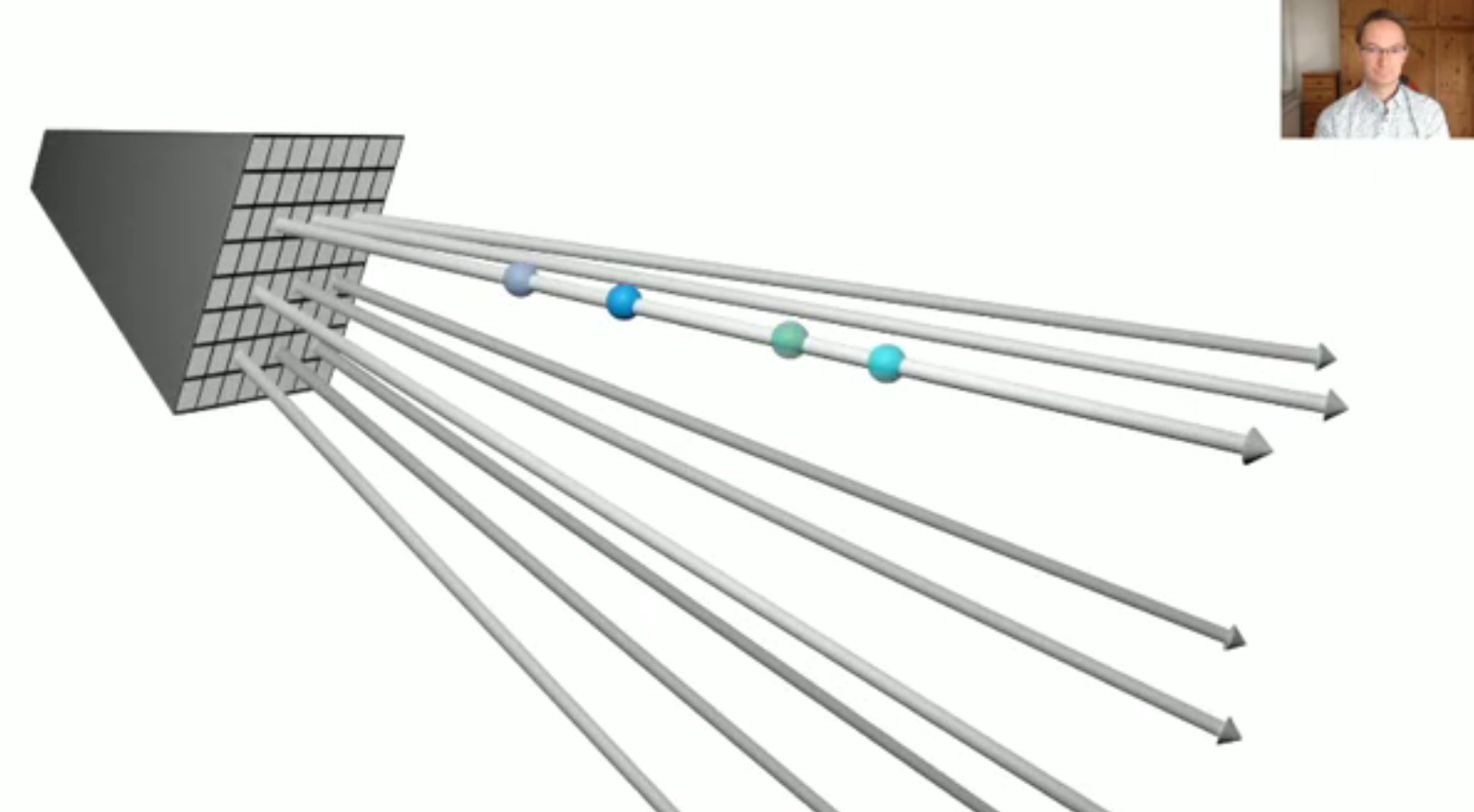
渲染的可视化效果如下, 我个人感觉已经很直观了~,关于体渲染的具体理论我在这里不展开,本篇博客的主要目的是介绍NeRF所涉及代码的每个方面。
总的来说,NeRF的流程分为3步,下面的代码也会按照这个流程进行展开:
-
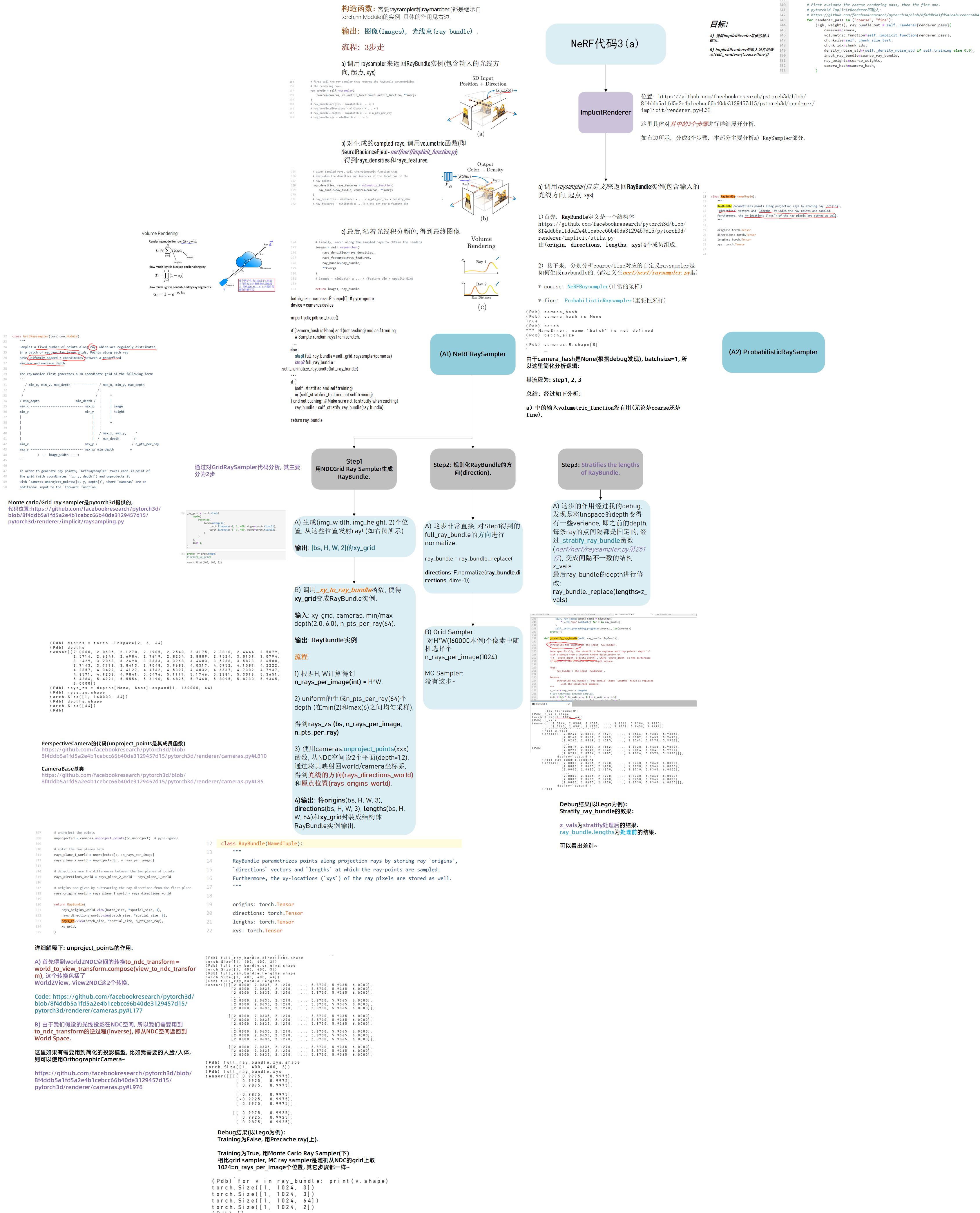
(a) 使用raysampler生成光线rays (包含输入的光线方向, 起点, 位置).
-
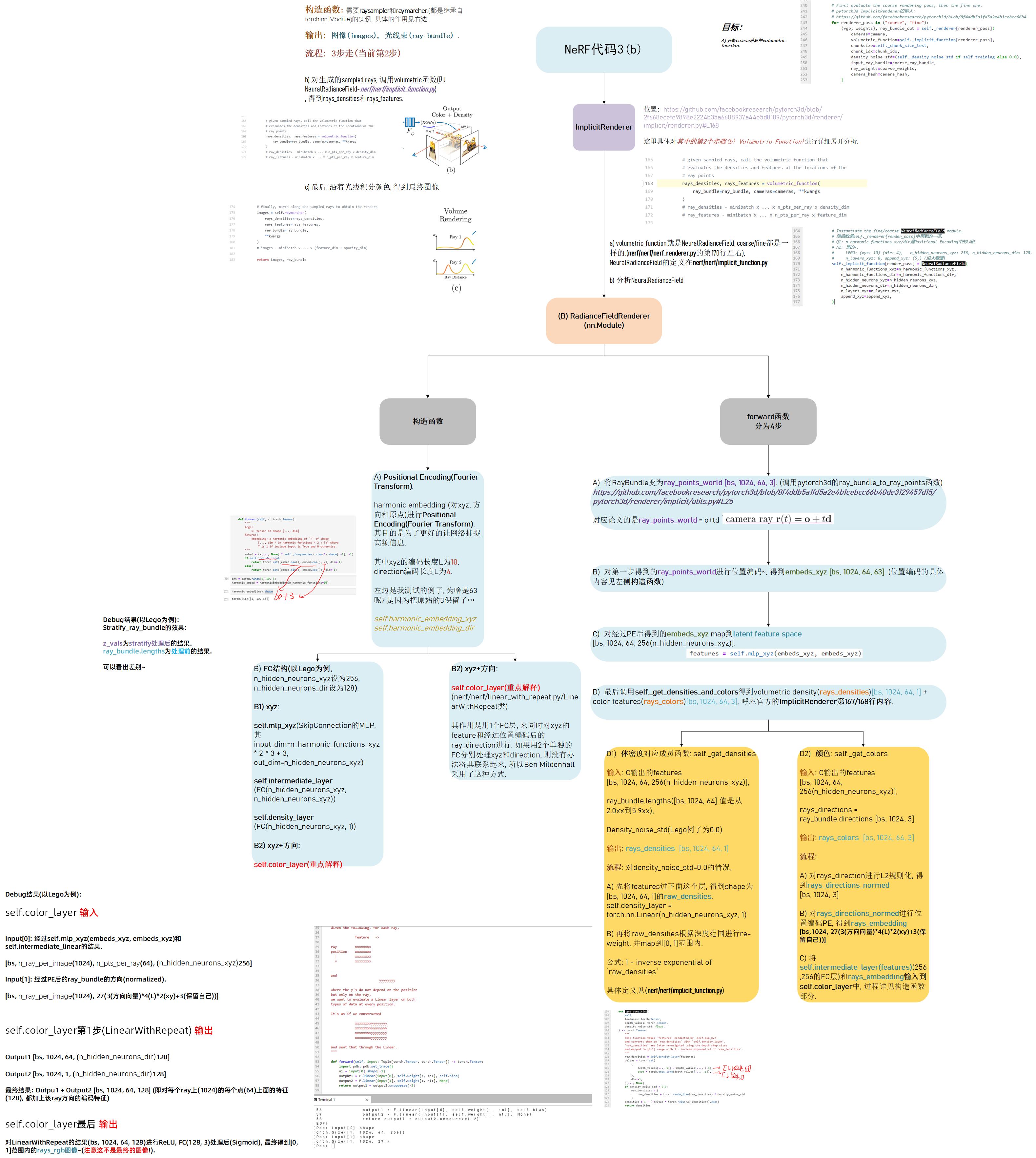
(b) 对生成的sampled rays, 调用volumetric函数(即NeuralRadianceField-
nerf/nerf/implicit_function.py), 得到rays_densities σ \sigma σ和rays_features c \mathbf{c} c. -
© 最后, 沿着光线积分颜色, 得到最终图像(如上gif图)
2. NeRF代码框架
研究目标:
- 研究训练和推理中, 每个环节的输入&输出.
- 借此机会仔细分析下PyTorch3D的ImplicitRenderer以及Volumetric Function(可self define)的设计.
研究内容:
我们主要关注数据的处理流程和NeRF的关键步骤, 一些可视化和工具化的脚本和函数在本blog里将不会展开介绍。

2.0 Data
位置: nerf/nerf/datasets.py/get_nerf_datasets函数
说明: 返回图像, 相机参数, 相机编号3个东西组成的数据结构:
[{
“image”:xxx, “camera”:xxx, “camera_idx”: int}]
image: 8bit原始图像归一化到[0,1]的(torch.FloatTensor) [H, W, 3] (本例取H=W=400)
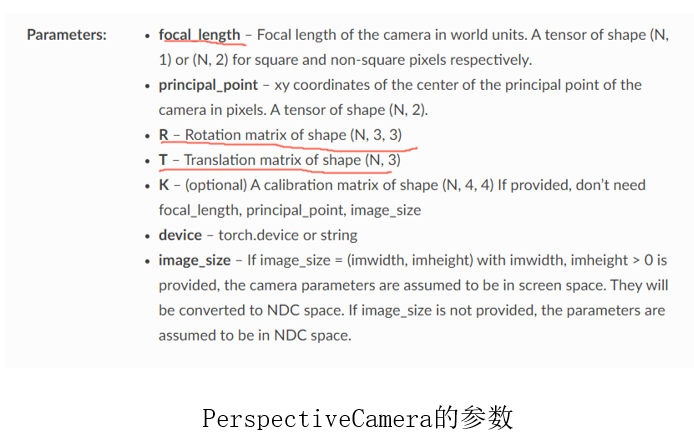
camera是pytorch3d.renderer.cameras.PerspectiveCameras的实例, 详细参数见下面的介绍.
camera_idx则是标识相机序号的int型(0, 1, 2, ..., 99).
以Lego(乐高)的小车数据为例,
训练数据为100个相机视角下(Idx分别标识不同的相机视角)的图片.下面选择3个例子展示一下: 这里的相机模型用的是透视相机[4](PerspectiveCamera)
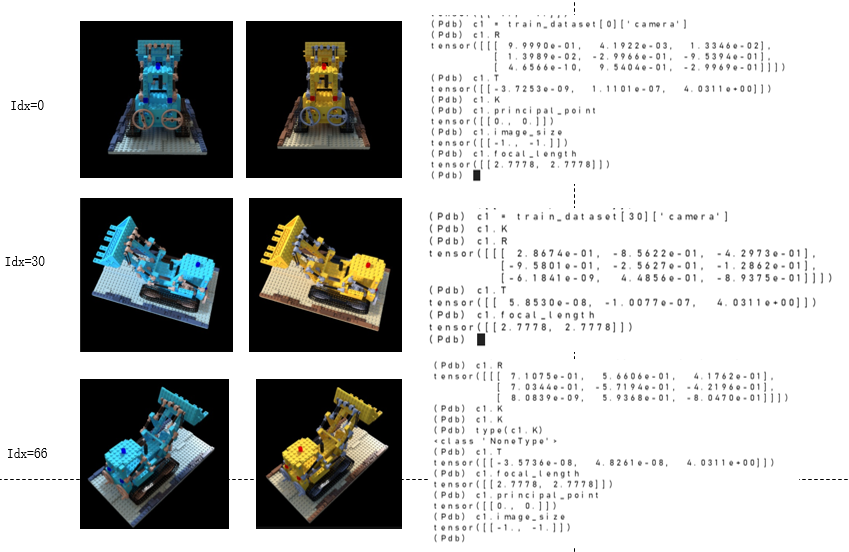
可以对照文档,分析透视投影相机的参数,这里我们主要用到的是选择矩阵 R R R, 平移矩阵 T T T, 焦距 f o c a l _ l e n g t h focal\_ length focal_length以及主视点 p r i n c i p l e _ p o i n t principle\_point principle_point(具体的数值见上图).
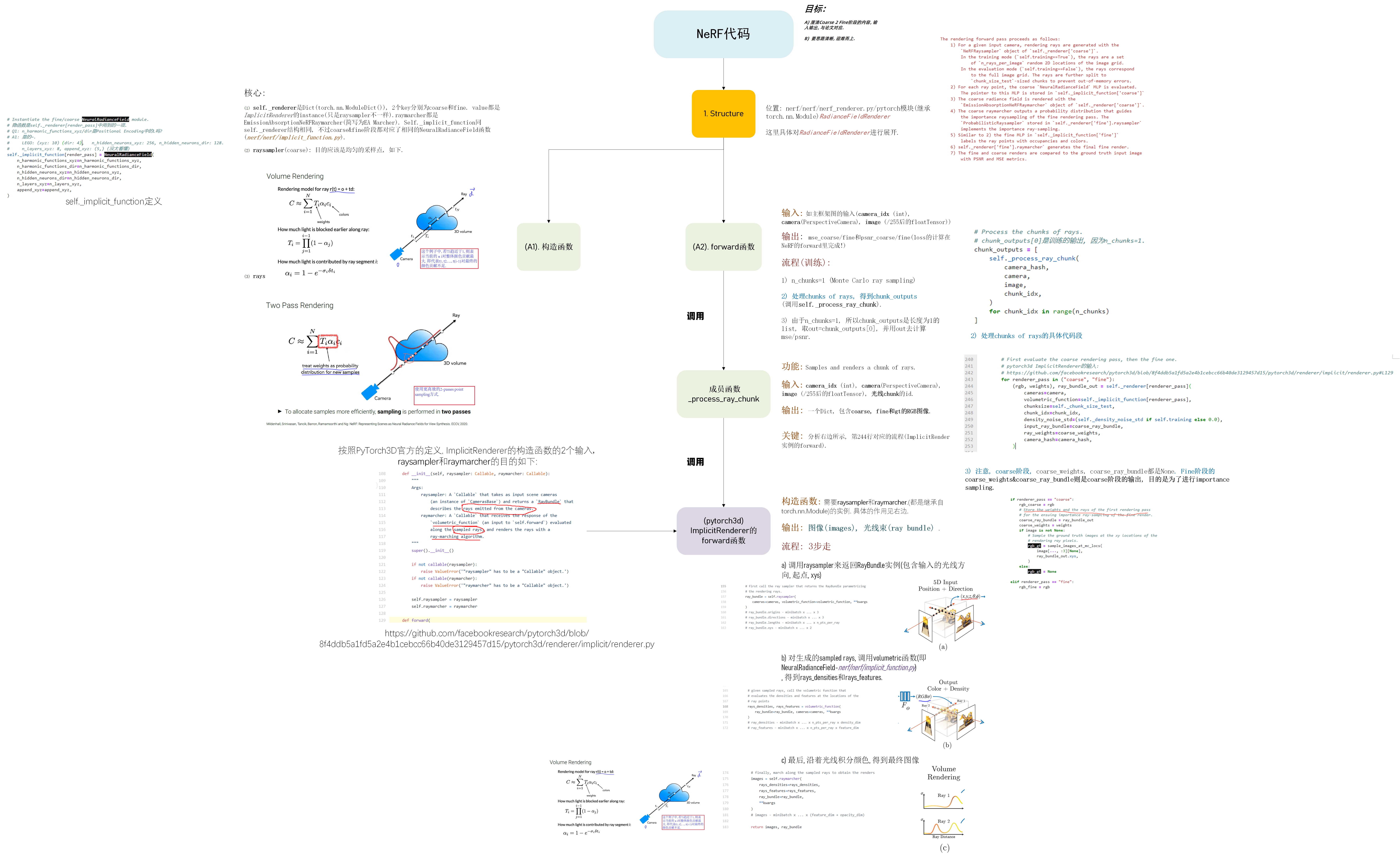
2.1 Structure
位置: nerf/nerf/nerf_renderer.py/pytorch模块(继承torch.nn.Module)RadianceFieldRenderer
说明: 包含pytorch3d.renderer.ImplicitRenderer的instance & 表征NeRF的网络的instance.
渲染过程: coarse2fine(分为3大步, 7小步)
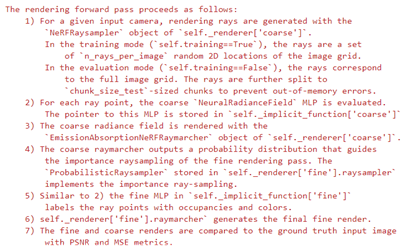
其中
Coarse: 1,2,3
Fine: 4,5,6
Optimization: 7
由于结构远比数据处理的部分复杂, 因此新开一个section进行分析.
3. Structure
这里是结构的整体示意图,为了方便理解,我把相关的代码,图示都放在一起了。请大家放大查看。
3.1 第一步: 使用raysampler生成光线rays
3.2 第二步: 对生成的sampled rays, 调用volumetric函数(即NeuralRadianceField-nerf/nerf/implicit_function.py), 得到rays_densities和rays_features.
3.3 第三步: 最后, 沿着光线积分颜色, 得到最终图像
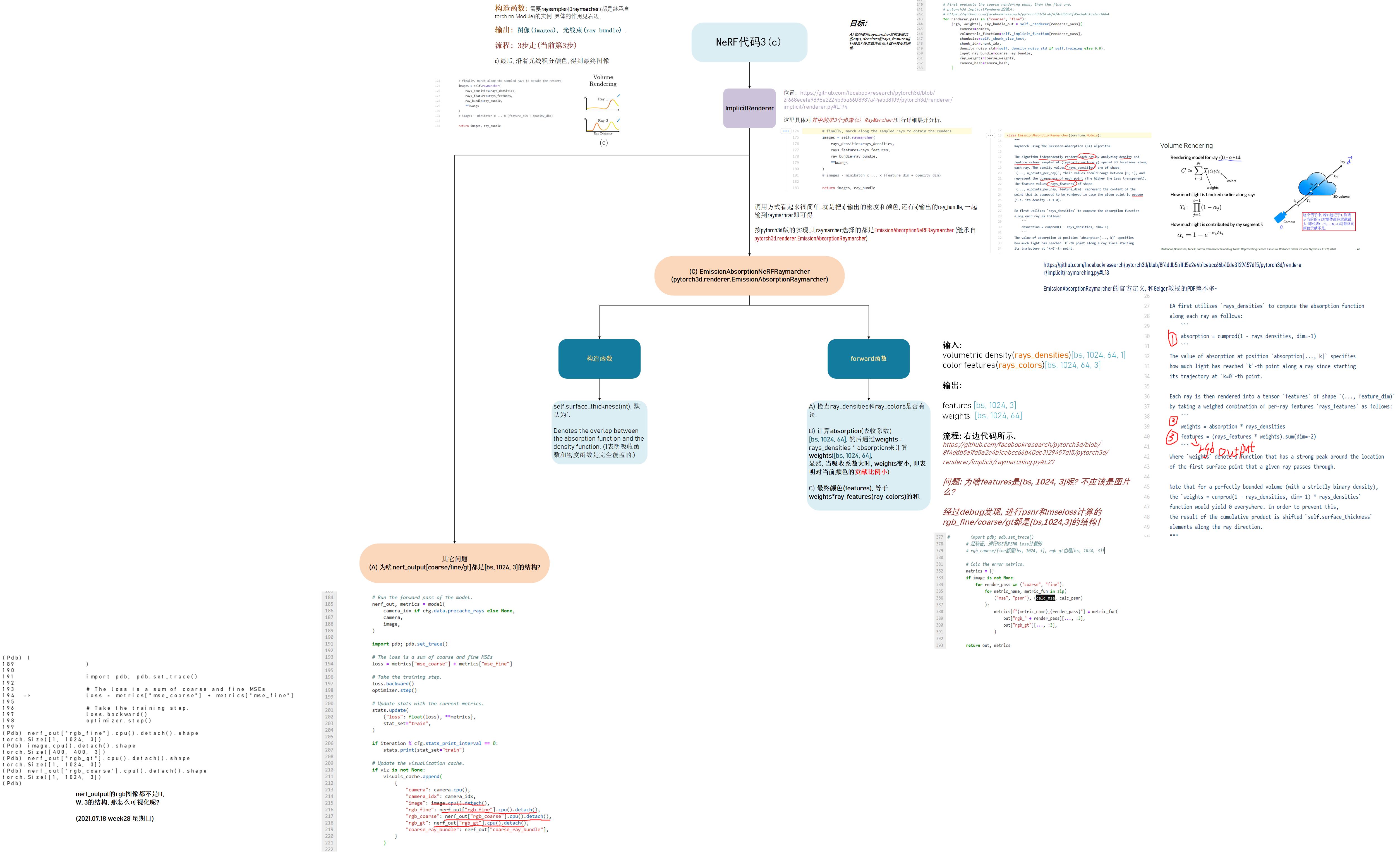
4. 问题
Q1: 为什么生成出来的rgb_coarse, rgb_fine, rgb_gt都是[bs, 1024(n_rays_per_image), 3],而不是[bs, H, W, 3]呢?
A1: 因为体渲染的计算量非常大, 所以一次只计算一部分光线渲染的结果(即对应于图像中的局部patch), 然后再把这个patch结合起来,最终得到渲染的图像.
以H=W=400为例,训练时一直用的是[bs, 1024, 3]进行loss的计算和网络的迭代。
测试时,首先先按照GPU容许的chunk_size进行计算, 得到需要计算的光线束的总量:
step1: nerf/nerf/nerf_renderer.py的第340行左右
if not self.training:
# Full evaluation pass.
# self._renderer['coarse'].raysampler.get_n_chunks是根据xy_grid来计算需要多少个
# chunk (比如400*400, chunk_size_test=6000, 那n_chunks就等于
# (Pdb) math.ceil(160000 / 6000)
# 27
n_chunks = self._renderer["coarse"].raysampler.get_n_chunks(
self._chunk_size_test,
camera.R.shape[0],
)
# print("[n chunks] shape", n_chunks)
# 测试阶段, n_chunks等于27
else:
# MonteCarlo ray sampling.
n_chunks = 1
step2: 根据每次渲染的光线数量(6000)以及总光束的数量(27), 进行渲染,最终将其进行拼接: 26 x 6000+ 1 x 4000 = 160000, 再reshape为400*400的图像即可~
# Process the chunks of rays.
# chunk_outputs[0]是训练的输出, 因为n_chunks=1.
# 测试阶段, 以lego为例, n_chunks=27, chunk_outputs是个list,
# 其中的每个item都是dict, keys为[rgb_coarse, rgb_fine, rgb_gt].
# rgb_coarse/rgb_fine/rgb_gt都是[bs(1), 6000, 3].
chunk_outputs = [
self._process_ray_chunk(
camera_hash,
camera,
image,
chunk_idx,
)
for chunk_idx in range(n_chunks)
]
import pdb; pdb.set_trace()
# (Pdb) len(chunk_outputs)
# 27
# (Pdb) for item in chunk_outputs: print(item['rgb_fine'].shape)
# 可以看到, 26*6000+1*4000 = 160000 = 400*400, 这就是H*W!
# torch.Size([1, 6000, 3])
# torch.Size([1, 6000, 3])
# torch.Size([1, 6000, 3])
# ...
# torch.Size([1, 6000, 3])
# torch.Size([1, 4000, 3])
if not self.training:
# For a full render pass concatenate the output chunks,
# and reshape to image size.
# 拼接即可.
out = {
k: torch.cat(
[ch_o[k] for ch_o in chunk_outputs],
dim=1,
).view(-1, *self._image_size, 3)
if chunk_outputs[0][k] is not None
else None
for k in ("rgb_fine", "rgb_coarse", "rgb_gt")
}
else:
out = chunk_outputs[0]
[1] NeRF
[2]:GRAF介绍
[3]: pytorch3d/nerf
[4]: pytorch3d/PerspectiveCamera