rqt_robot_steering 控制小乌龟
在index ros .rog中查找相关的包:ros_index
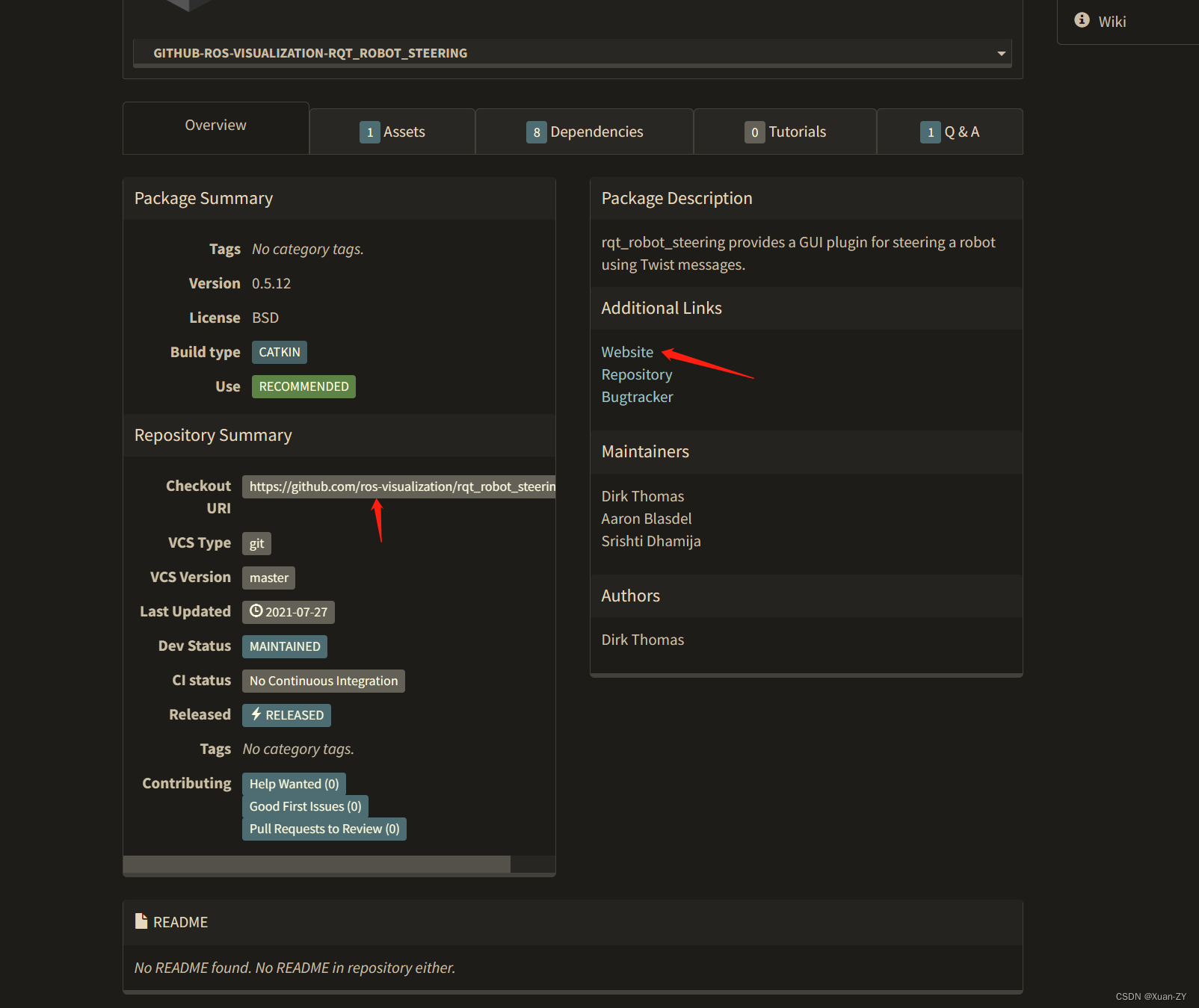
下图是rqt_robot_steering的简介
其中可以查看github源码地址
website可以查看效果图
下载相关的包
sudo apt install ros-kinetic-rqt-robot-steering
roscore
打开ros核心
rosrun rqt_robot_steering rqt_robot_steering
第一个是包的名称,第二个是节点的名称
运行小乌龟
rosrun turtlesim turtlesim_node
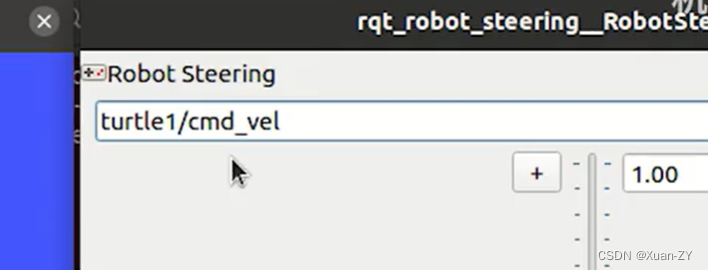
修改"速度"发送主题的名称
创建工作空间

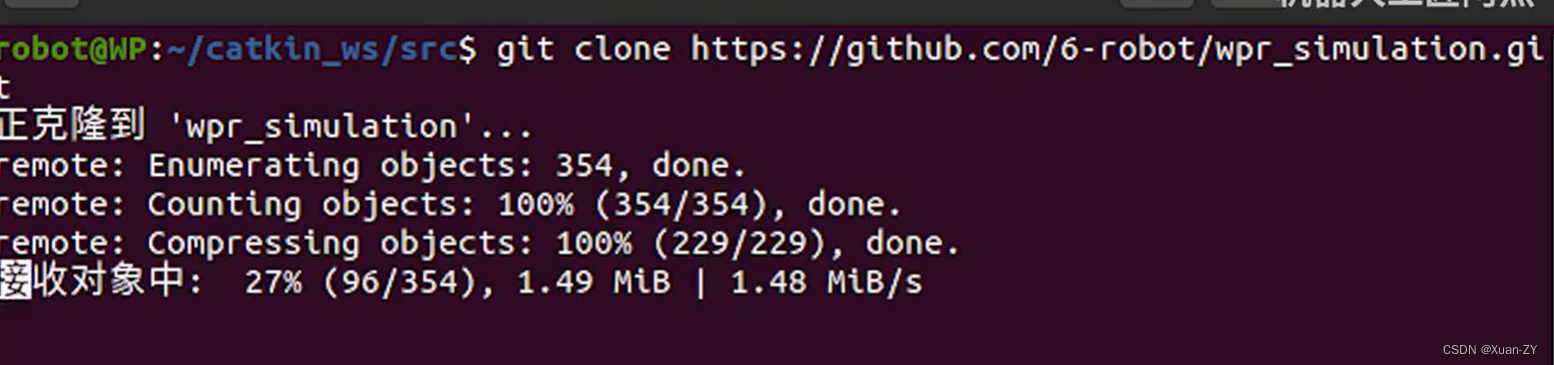
克隆软件包源代码到src目录下
安装py依赖包
./install_for_kinetic.sh
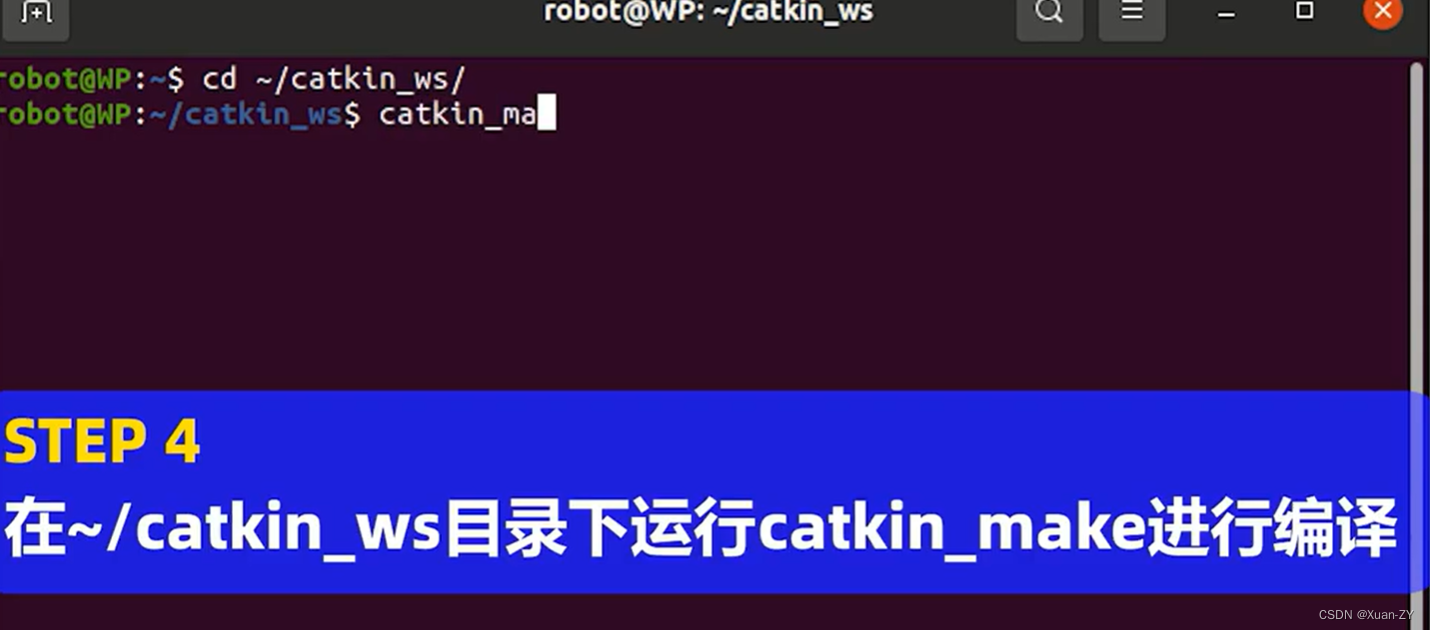
在catkin_ws目录下进行编译
编译工程
对src里面所有源代码工程进行编译
将catkin_ws中工作空间里的环境参数加载到终端程序里面,否则运行指令会提示找不到软件包
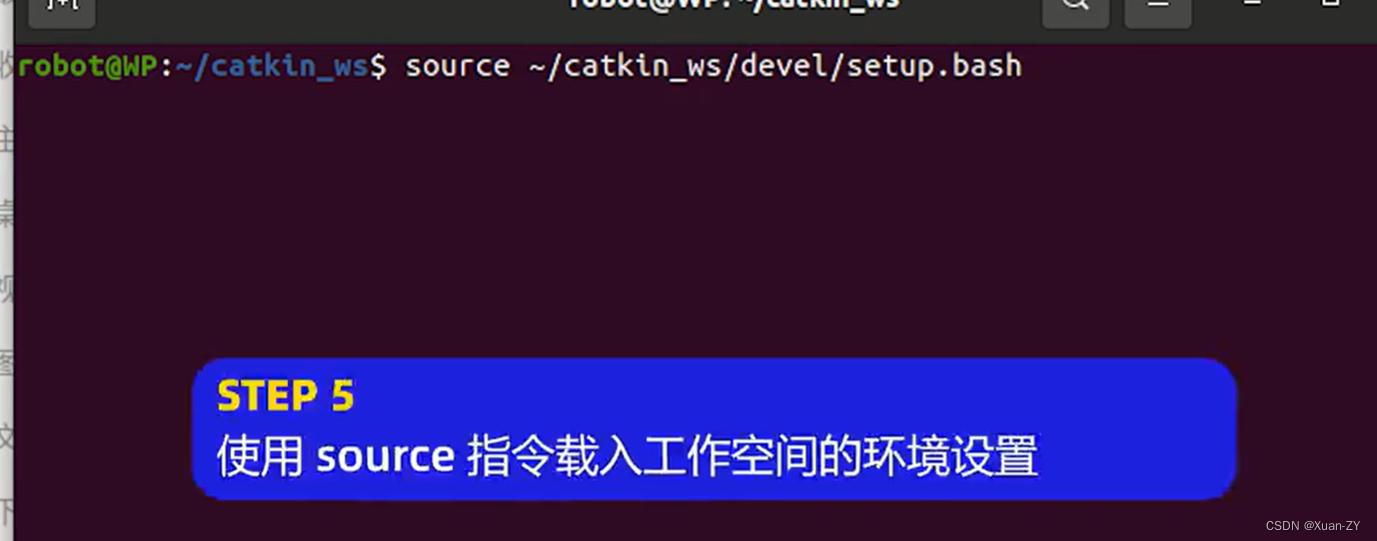
source devel/setup.bash

添加依赖,以后开启终端自动source
gedit ~/.bashrc
source ~/catkintest_ws/devel/setup.bash

Linux下vscode配置
CTRL+shift+B:快速编译工程

"group": {
"kind":"build","isDefault": true},
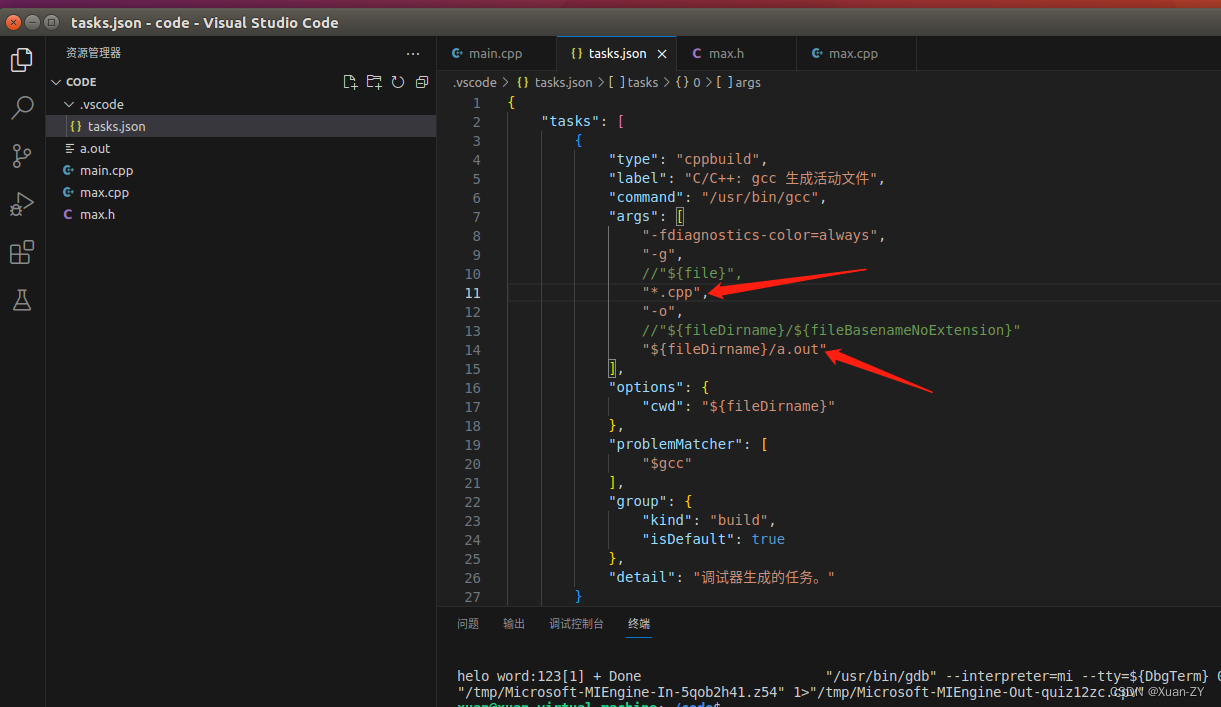
vscode中c/cpp文件编译
task.json
"*.cpp",:编译所有.cpp文件
"${fileDirname}/a.out" :生成可执行文件
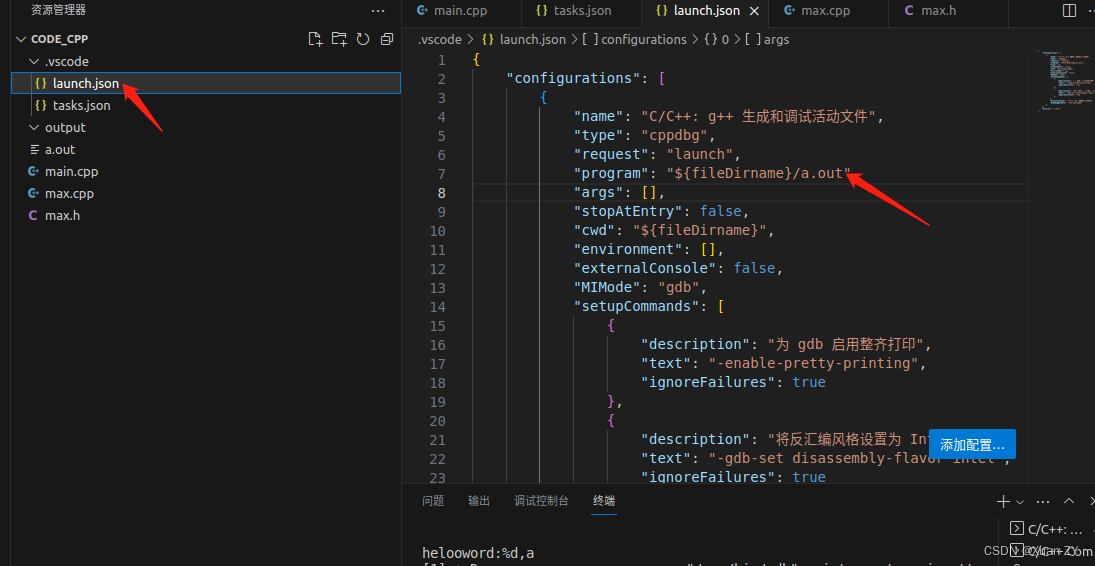
更改可执行文件路径
启动gazebo报错
///====================================================================//
catkin_init_workspace
catkin_make
buid:可执行文件
devel:执行文件
src:功能包
source devel/setup.bash
把工作空间的路径添加到ros中,如果没有souce工作空间无法找到
roscore
需要开启ros才能打开rviz
rviz
roslaunch grid_path_searcher demo.launch