前两篇帖子介绍了暴力递归的过程,总的来说就是利用自然智慧+不断的尝试。这篇文章则会介绍如何将暴力递归转成动态规划。
斐波那契数列
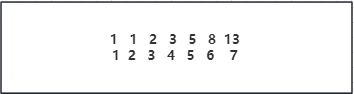
斐波那契数列一定都不陌生,规定第一列的值是1,第二列的值是2的话,那第七列的值就是13,以此类推,整体上是一个 f(N) = f(N -1 ) + f(N - 2)。
那如果尝试着用暴力递归的思想来解决的话代码如下:
public static int f(int N) {
if (N == 1) {
return 1;
}
if (N == 2) {
return 1;
}
return f(N - 1) + f(N - 2);
}
这么简短的几行代码其实就实现了斐波那契数列数列,那如果此时要求f(7)的值,展开来看的话,其实是不是就是一个二叉树的形状。f(7)依赖着f(5)、f(6)。f(6)依赖着f(5)、f(4)以此类推。。。。
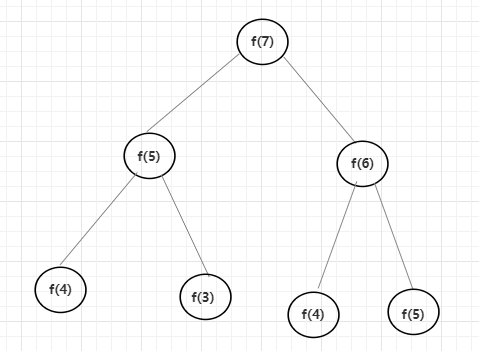
通过画图可以看出,想要求出一个f(7)的值,会依赖很多方法,而且有的方法会执行很多次,那如果此时有一张表结构,可以将之前的结果 “缓存” 起来,以后碰到了直接拿值。是不是就方便了很多,用 O ( N ) O(N) O(N)的时间复杂度就可以解决这个问题。
这个"缓存",就是动态规划。来一道具体的题目巩固一下:
题目
假设有排成一行的N个位置,记为1 ~ N,N >= 2 , 有一个机器人,
开始时,机器人在其中的start位置(start是1 ~ N 中间的一个)。
如果机器人当前在1位置,那下一步只能向右来到2的位置。
如果机器人在N位置,那下一步只能向左来到 N - 1位置。
如果在中间,则可以左右挪动。规定机器人必须走K步,最终来到target位置,(target也是1 ~ N中的一个)。
问机器人从start必须走K步,来到target位置,一共有多少种方法。
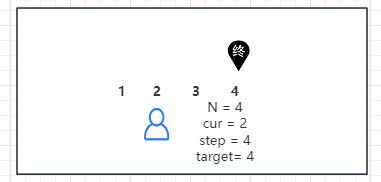
如果所示,假设当前起点在2,终点在4,共4个位置,一共走4步,共有几种方法可以走到:共三种
- 2 -> 1 -> 2 - >3 -> 4
- 2 -> 3 -> 4 -> 3 -> 4
- 2 -> 3 -> 2 -> 3 -> 4
暴力递归
- 根据题目分析,确认base case ,当step 为0,说明没有步数可以走, 就return。
- 如果cur = 1,那下一步只能向右走。
- 如果cur = N,那下一步只能向左走。
- 否则,在中间,则左右都可以,那向左走到达target的方法 + 向右走到达target的方法,就是总共的方法数。
代码
参数cur:当前机器人所在位置 step:剩余的步数 target:目标位置 N:一共N个位置
K:一共有多少步
//方法返回机器人从cur出发,走step步,到达target的方法数
public static int ways(int cur, int K, int target, int N) {
return process(cur, K, target, N);
}
public static int process(int cur, int step,int target, int N) {
//当步数为0时,看当前位置是否在目标位置,如果在,则方法数 + 1,否则认为没走到为0
if (step == 0) {
return cur == target ? 1 : 0;
}
//无论怎么走,每走一步 step 一定 -1
//当前位置为1时,必须向右,所以下一步会是在2位置
if (cur == 1) {
return process(2, step - 1, target, N);
}
//当前位置为N时,必须向左,所以下一步在N -1位置
if (cur == N) {
return process(N - 1, step - 1, target, N);
}
//否则,在中间,可能向左走,也可能向右走
return process(cur + 1, step - 1, target, N) + process(cur - 1, step - 1, target, N);
}
优化
如何利用暴力递归优化成动态规划其中很重要的一点就是,根据调用过程,看有没有重复接,如果出现重复解的情况,则一定可以优化成动态规划。
从上面的代码中可以分析出,影响ways方法结果的因素都有什么?
N是固定不变的,target也是固定不变的,而上面的代码中,是不是只有cur当前位置的变化以及step在不停的减少。所以,影响整个结果的参数是当前位置和步数。
将过程展开来看。比如说现在start = 7, target = 15,step = 10,从7位置出发走到15位置,要走10步,看看它都有什么走法。
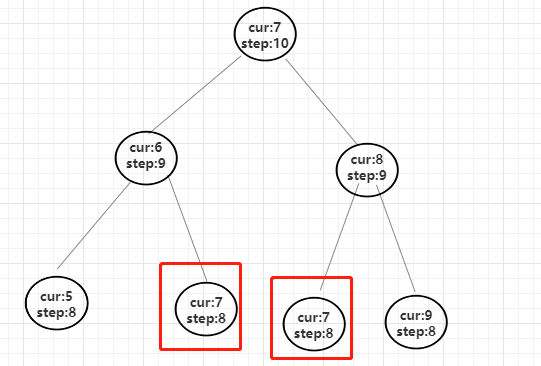
7是中间位置,出发后,左右两边都可以走,当走到当前位置为7时,剩余步数是8,子过程有重复调用情况,说明可以由暴力递归优化成动态规划。此时不用在意之前的调用情况。
因为此时两个画圈地方的当前位置都是7,剩余步数是8,以及target是15是固定不变的,所以此时到target的方法数一定是一样的。所以不用在意是 7 -> 6 -> 7 还是 7- > 8 -> 7。
由此可以分析出,cur和step是决定状态的key,只要这两个确定了,那结果就可以确定了。
找到了key,根据key创建一个二维数组,来代表缓存的表。如果来到当前位置,并且剩余步数还一样,那到达target的方法数也一定相同,如果缓存表中存在,可直接通过缓存表获取即可。
代码
//cur范围:0 ~ N
//step范围:0 ~ K
public static int ways2(int cur, int K, int target, int N) {
//创建一个N + 1和 K + 1返回的数组,保证到任何位置都能囊括进去
int[][] dp = new int[N + 1][K + 1];
for (int i = 0; i <= N; i++) {
for (int j = 0; j <= K; j++) {
dp[i][j] = -1;
}
}
return process2(cur, K, target, N, dp);
}
public static int process2(int cur, int step, int target, int N, int[][] dp) {
//不等于 -1 说明 之前计算过当来到cur位置时,剩余step 到达target的方法数
if (dp[cur][step] != -1) {
return dp[cur][step];
}
//走到这,说明没算过
int ans = 0;
if (step == 0) {
ans = cur == target ? 1 : 0;
} else if (cur == 1) {
ans = process2(2, step - 1, target, N, dp);
} else if (cur == N) {
ans = process2(N - 1, step - 1, target, N, dp);
} else {
ans = process2(cur + 1, step - 1, target, N, dp) + process2(cur - 1, step - 1, target, N, dp);
}
//记录当前位置到达target的方法数。
dp[cur][step] = ans;
return ans;
}
此时,代码已经经历了"傻缓存"的优化,通过dp表来记录每一步的方法数,这种从顶向下的动态规划,名字叫做"记忆化搜索",本质上走每一个分支就是搜索,通过缓存表形成记忆化,利用空间换时间,通过一张缓存表来换取更大的时间。
如何将上面代码进行再次的优化?
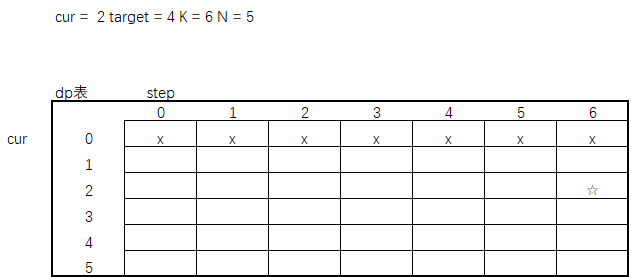
上面通过cur当前所在位置以及剩余步数step构建了一个二维数组的缓存表,这个二维数组包含了给定的cur和step内每一步所有结果,那是不是可以尝试将这个dp表画出来?假设,当前机器人在2位置,总共5个位置,要走6步,目标是走到位置4。
所以cur = 2 K = 6 N =5 target = 4 ,画出来的图是这样的。
其中行是当前所在位置,列是步数,因为不可能到达0行,所以0行所在位置标记x。初始位置是2,还剩6步,标星星。
我只要将图补全,将当前位置和每一步的结果方法数填充到格子中。是不是就可以直接从表中知道2-6位置的步数。
那该如何完善这个表么?从最开始的暴力递归代码做起,有一些base case会直接给我们答案。根据代码逻辑一行一行的完善。
public static int process(int cur, int step, int target, int N) {
if (step == 0) {
return cur == target ? 1 : 0;
}
if (cur == 1) {
return process(2, step - 1, target, N);
}
if (cur == N) {
return process(N - 1, step - 1, target, N);
}
return process(cur + 1, step - 1, target, N) + process(cur - 1, step - 1, target, N);
}
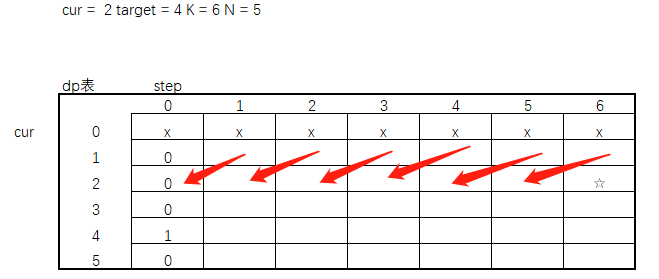
先从base case来,如果我剩余步数为0,此时如果 cur 的位置在 target 上的话,是不是说明有一种方法是可以到达的,其余不在target位置上方法数就是0,所以第一列就出来了。

继续接着往下看,当前是cur、step的状态(参数传进来的)那如果当前位置 cur = 1,根据题意,下一步只能向2位置挪动,而每移动一次step - 1,所以如果此时是cur = 1,step = 1的情况下,依赖的是cur = 2,step = 0的结果。所以cur在第一行任意位置依赖关系是这样的。
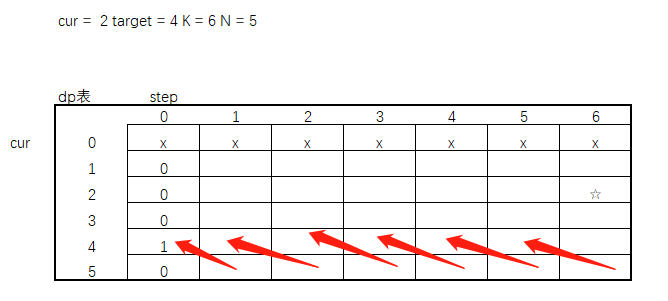
继续往下,如果当前cur = N,那下一步只能向左移动(N -1),同样每移动一次step - 1,所以cur在N行任意位置的依赖关系是这样的。
好,现在只剩普遍位置了,假设此时 cur = 3,看代码,可以左移也可以右移。所以此时的依赖关系是这样的。
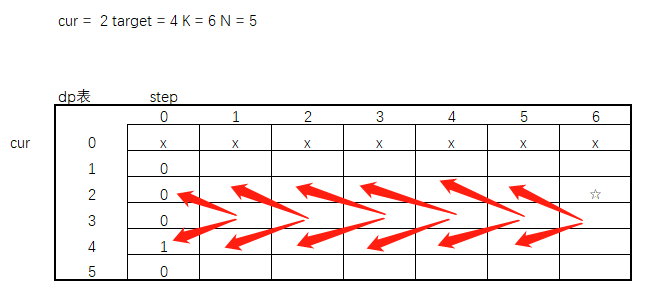
在根据代码,如果此时cur = 3,是不是将依赖结果进行相加,那此时dp表是不是就完整了。
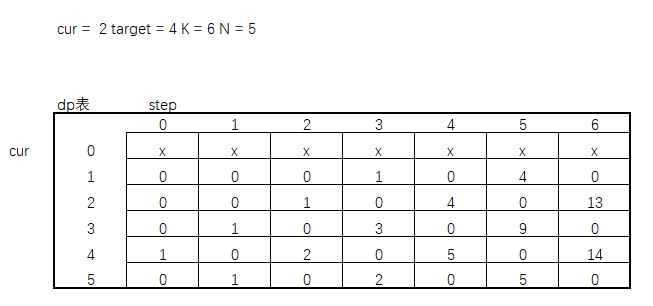
可以看到,cur = 2,step = 6时,一共13个方法解可到达target = 4的位置。此时如果将dp表直接构建出来,是不是就可以根据变量cur和step来直接获取到结果。
代码
整个动态规划代码很简洁。
public static int ways3(int cur, int K, int target, int N) {
int[][] dp = new int[N + 1][K + 1];
//先将对应target位置标1
//初始化int[][]默认值都是0,所以其他值不用管
dp[target][0] = 1;
//按列遍历
for (int step = 1; step <= K; step++) {
//先将第一列的值确定
dp[1][step] = dp[2][step - 1];
//因为我单独遍历N行时的值,所以这个遍历到 N -1即可
for (int j = 2; j < N; j++) {
//按照依赖关系,当前位置依赖左上和左下的位置
dp[j][step] = dp[j - 1][step - 1] + dp[j + 1][step - 1];
}
//再将最后一列的值确定
dp[N][step] = dp[N - 1][step - 1];
}
return dp[cur][K];
}