一、spi四种模式详解
不同的模式采集数据的方式是不一样的。
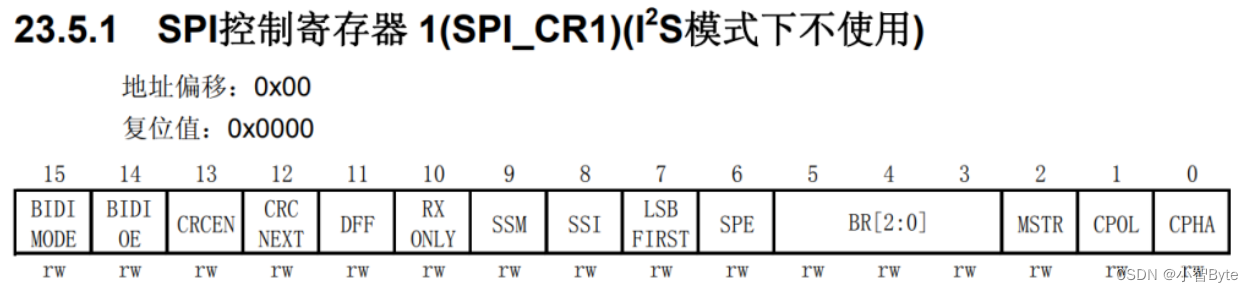
一般内置SPI的单片机上,都有两个寄存器配置位CPOL和CPHA
我们拿STM32单片机来举例,可以通过结构体成员配置。
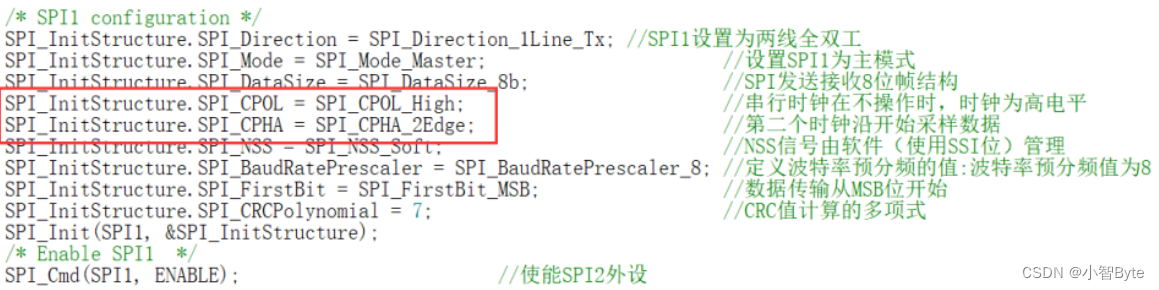
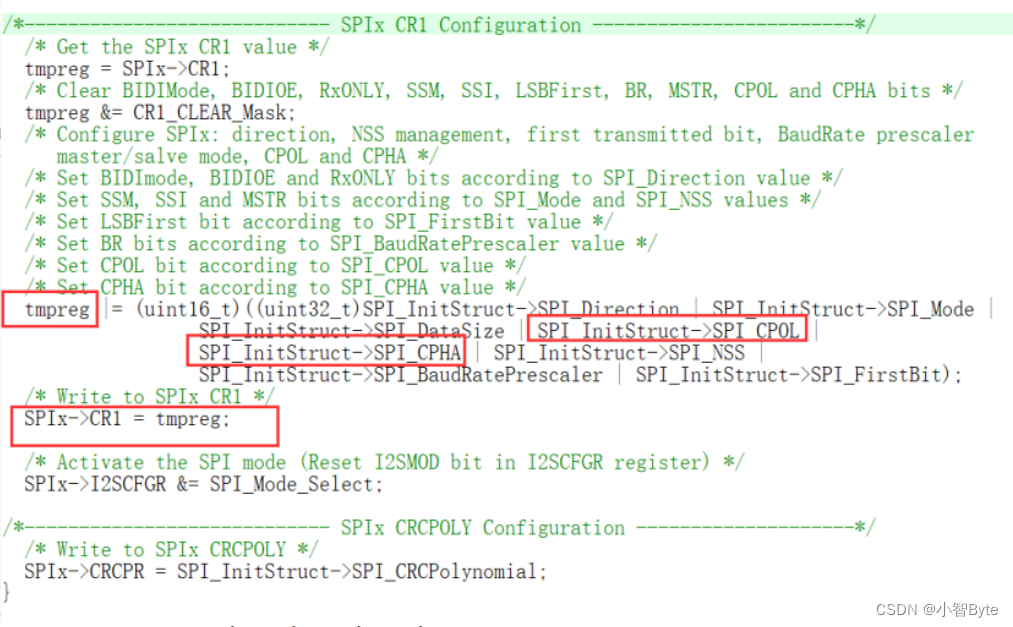
这是通过固件库直接配置,固件库的底层也是配置相应的寄存器。
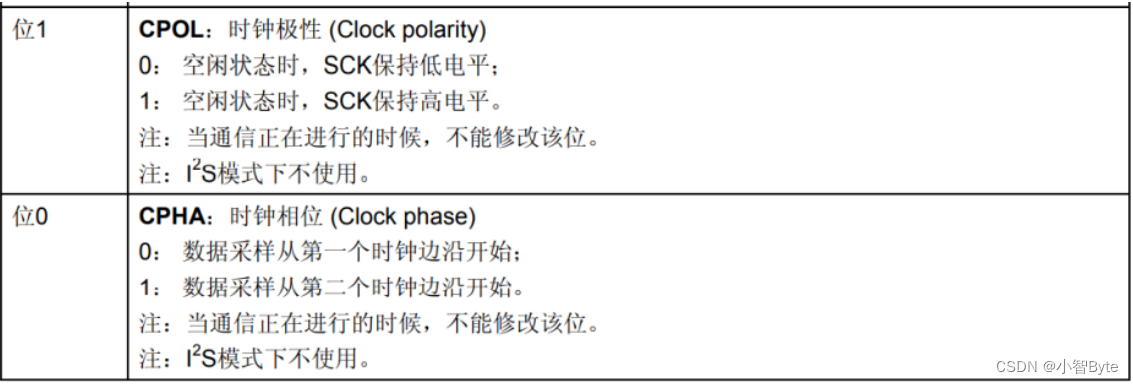
CPOL:时钟极性
CPHA:始终相位
CPOL和CPHA的作用。
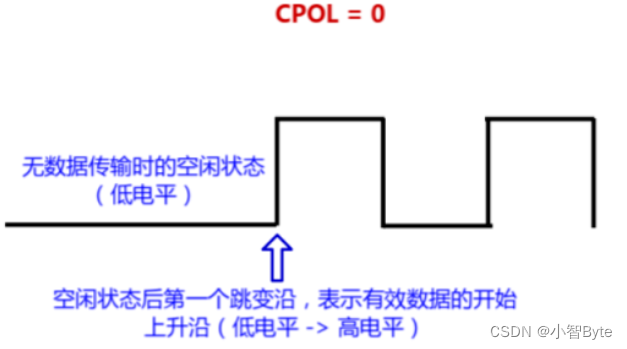
CPOL就是决定SCLK这根时钟信号线,在没有数据传输时候的电平状态(空闲的时候)
CPOL = 0:空闲状态时,SCLK保持低电平
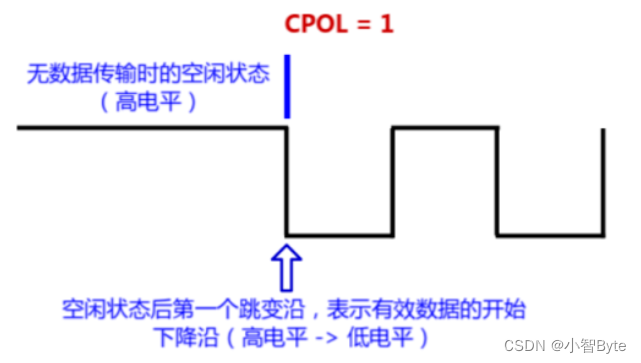
CPOL = 1:空闲状态时,SCLK保持高电平
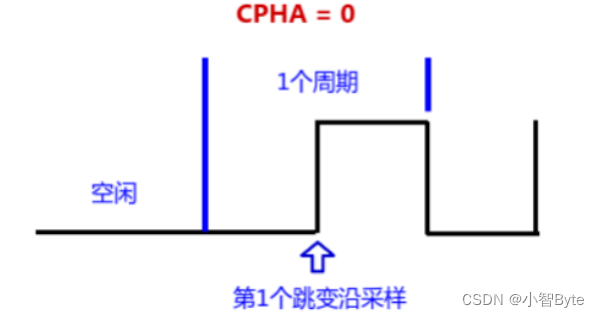
CPHA就是决定数据位传输是从第一个时钟(SCLK)边沿开始,还是从第二个时钟(SCLK)边沿开始
CPHA = 0:数据从第一个时钟(SCLK)边沿开始传输数据
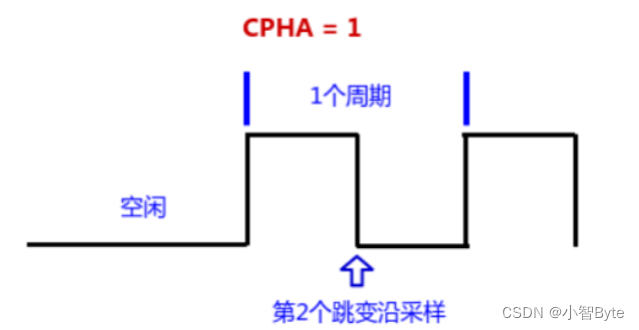
CPHA = 1:数据从第二个始终(SCLK)边沿开始传输数据
CPOL与CPHA组合的四种模式
CPOL和CPHA合体就形成了SPI四种模式。
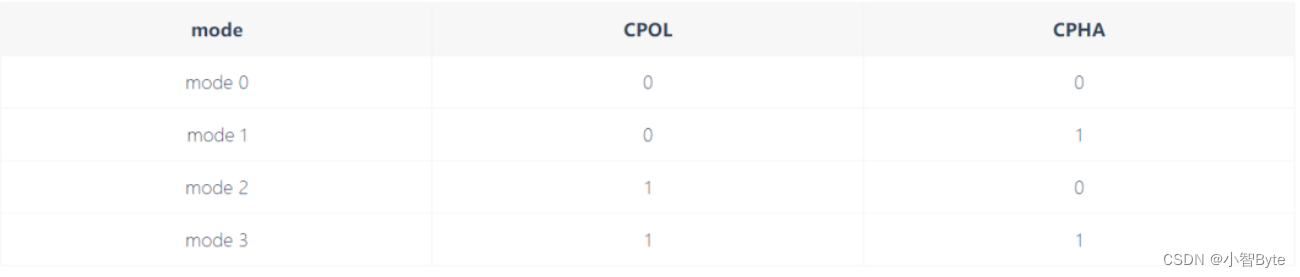
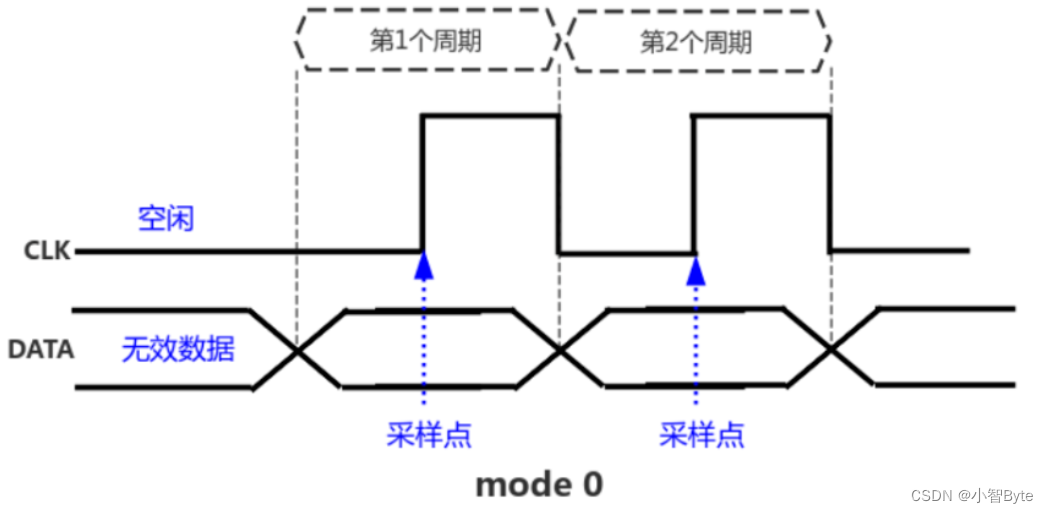
1、模式0(CPOL = 0, CPHA = 0)
模式0特性:
CPOL = 0:空闲时是低电平,第一个跳变沿是上升沿,第二个跳变沿是下降沿
CPHA = 0:数据在第一个跳变沿(上升沿)采样
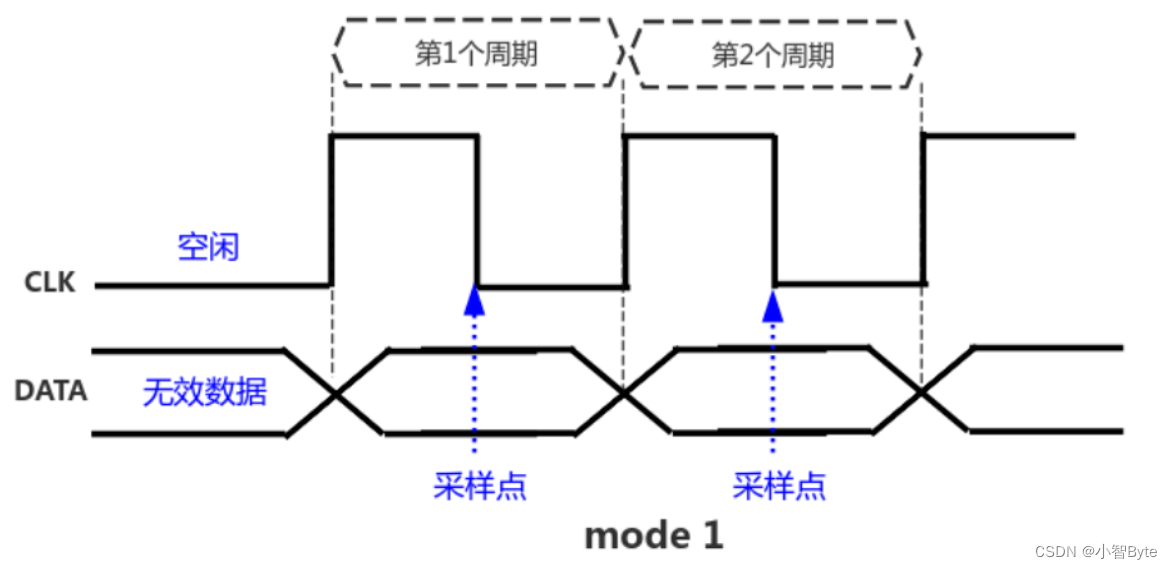
2、模式1(CPOL = 0, CPHA = 1)
模式1特性:
CPOL = 0:空闲时是低电平,第一个跳变沿是上升沿,第二个跳变沿是下降沿
CPHA = 1:数据在第二个跳变沿(下降沿)采样
3、模式2(CPOL = 1, CPHA = 0)
CPOL = 1:空闲时是高电平,第一个跳变沿是下降沿,第二个跳变沿是上升沿
CPHA = 0:数据在第一个跳变沿(下降沿)采样

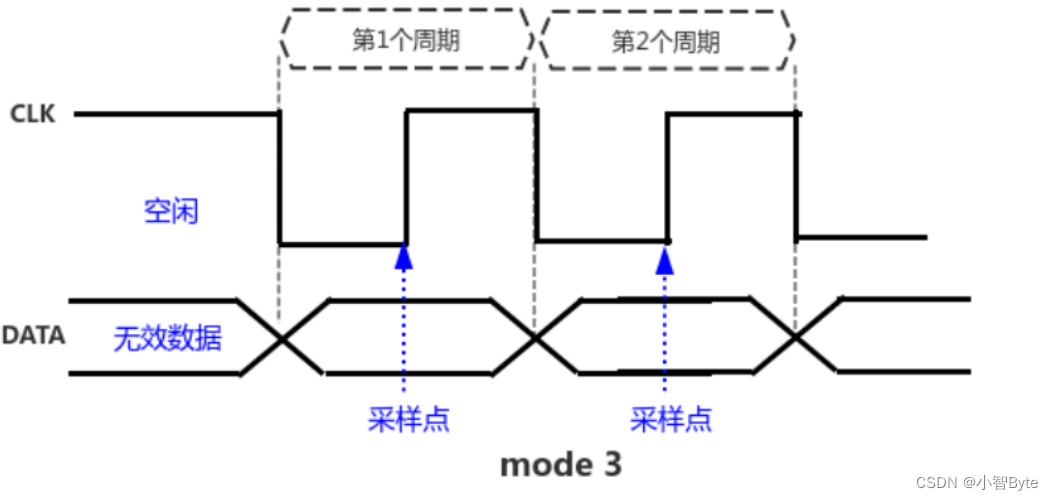
4、模式3(CPOL = 1, CPHA = 1)
CPOL = 1:空闲时是高电平,第一个跳变沿是下降沿,第二个跳变沿是上升沿
CPHA = 1:数据在第二个跳变沿(上升沿)采样
模式不同就是:空闲时间的电平状态和数据采样的起点不同
spi时序图详解
以W25Q64这个Flash芯片举例
- 这种芯片在SPI通信里都是作为从机的角色,也就SPI Slave。一般由单片机或者其它处理器作为主控和它通信,SLCK时钟也是由主控发出。
下面是W25Q64读数据指令的时序图:
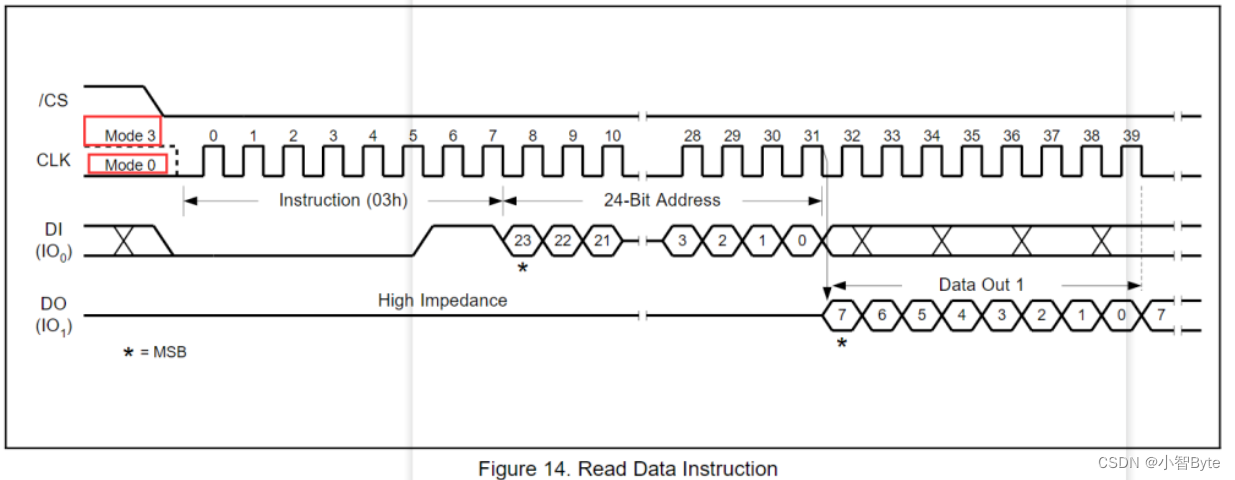
1.先确定芯片支持什么SPI哪种模式读写数据
确定了使用哪种模式,单片机才能确定数据采集的方式,主控和从机要保持一致。
如果有些芯片的数据手册是没有告诉是哪种模式时,需要自己看时序图分析
第一步:
- 通过时序图分析CLK空闲时的电平状态。图上显示,空闲时高低电平都可。先用低电平分析
第二步:
- 分析DI和DO是在时钟的上升沿还是下降沿采集数据。(DI代表从机MISO)(DO代表从机MOSI)
- 主要是通过DI与DO在数据有效区时,CLK时上升沿还是下降沿来判断
什么是数据有效区?
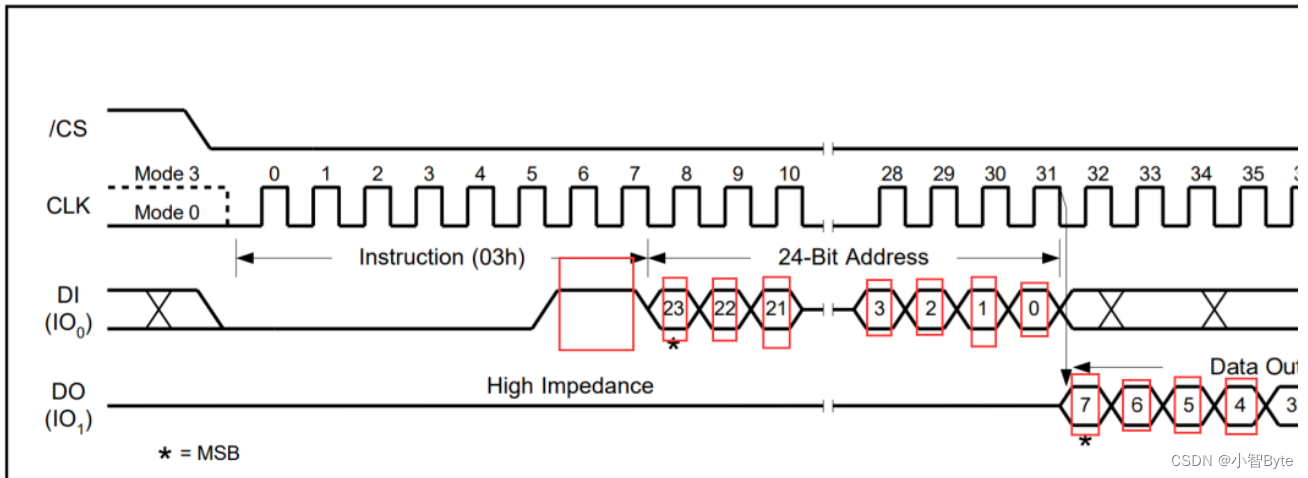
红色框起来的区域就是数据有效区。
- 一般数据是通过DI和DO两个引脚传输的,所以有效区就是,这两个引脚的值只能是高电平或者低电平
- 相当于有效区的电平就是最终要传输的数据位,低电平代表0,高电平代表1
- 传输8个位,代表1个字节的数据
什么是无效数据区?
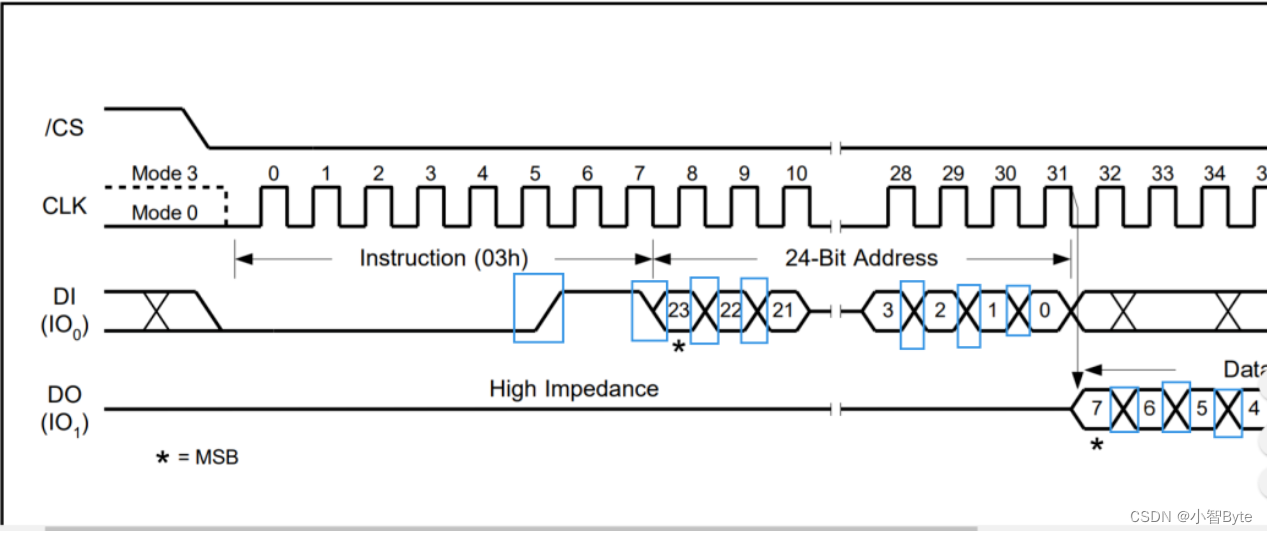
上图蓝色框的区域就是无效数据区
- 这个时刻CLK数据采集的时钟还没有到来,所以DI和DO引脚的电平是可变的
需要关心是的DI和DO在数据有效区的时候,CLK是上升沿还是下降沿。
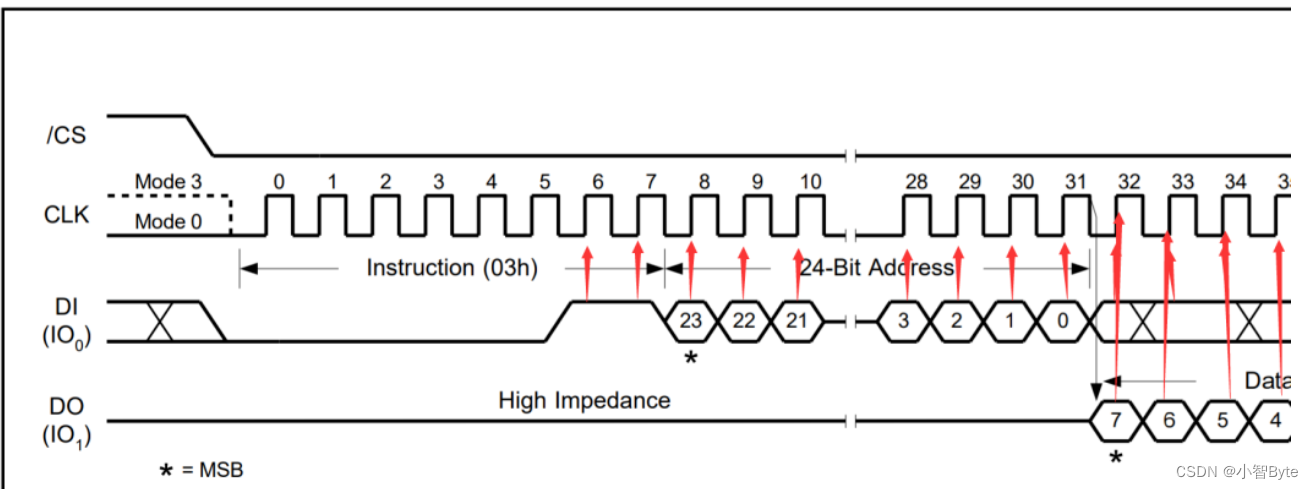
从上图可以看出
- DI和DO在数据有效区时,CLK是上升沿。在CLK是下降沿时,DI和DO引脚电平是可以变化的
所以就只有模式0和模式3可以满足当前从机的时序逻辑。
分析整体时序
W25Q64这个Flash芯片读取存储的数据。
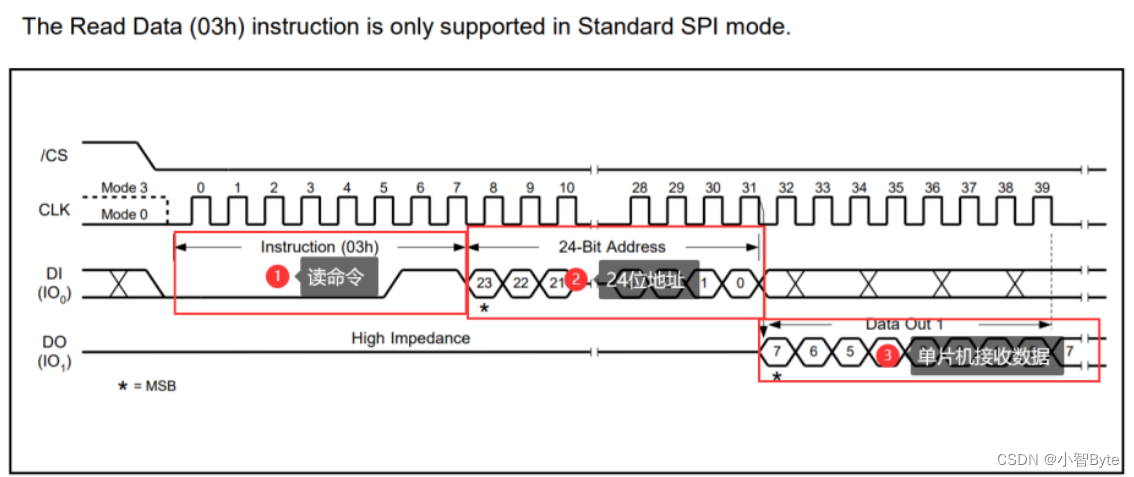
把整个时序按CLK脉冲顺序拆分成3个部分:
①读指令:
-
读指令数据是在W25Q64的DI引脚产生的,DI相当于W25Q64的MISO,就是接受单片机发送过来的数据
-
这个读指令(0x03)是单片机发给W25Q64的。
-
0x03内拆分为8个Bit在DI引脚上传输,每个CLK传输一位Bit
②24位地址
- 发完读指令之后,单片机继续发24位的内存地址,相当于单片机要读取W25Q64哪个内存地址的数据
- 这个数据的地址是由单片机确定的,不是固定的。数据位可以是高电平,也可以是低电平
③单片机接收数据
- 这个时候通信双方的角色就变了,单片机变成数据的接收方了,W25Q64变成数据的发送方
- 数据从W25Q64的DO引脚发送(MOSI)
- 通过时序,单片机就可以读取到存储在W25Q64中存储的数据
单片机程序注意
51单片机一般没有内置SPI模块,所以整个时序需要自己写程序去模拟,简称模拟SPI。
而STM32单片机一般有内置SPI,就不用自己写程序去模拟时序,直接应用。
但是如果用内置SPI有一个细节,特别容易被忽略,就是你读数据的时候,读一个字节之前要先发一个字节任意值数据。(哑数据)
发送一个字节的哑数据是为了维持主从设备之间的通信时序同步,确保数据的可靠传输。这个细节容易被忽略,但它在SPI通信中非常重要。