SPI,是英语Serial Peripheral Interface的缩写,顾名思义就是串行外围设备接口。SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议。
SPI是一个环形总线结构,由ss(cs)、sck、sdi、sdo构成,其时序其实很简单,主要是在sck的控制下,两个双向移位寄存器进行数据交换。上升沿发送、下降沿接收、高位先发送。
上升沿到来的时候,sdo上的电平将被发送到从设备的寄存器中。
下降沿到来的时候,sdi上的电平将被接收到主设备的寄存器中。
SPI总线是Motorola公司推出的三线同步接口,同步串行3线方式进行通信:一条时钟线SCK,一条数据输入线MOSI,一条数据输出线MISO;用于 CPU与各种外围器件进行全双工、同步串行通讯。
SPI主要特点有:可以同时发出和接收串行数据;可以当作主机或从机工作;提供频率可编程时钟;发送结束中断标志;写冲突保护;总线竞争保护等。
SPI总线有四种工作方式(SP0, SP1, SP2, SP3),其中使用的最为广泛的是SPI0和SPI3方式。
SPI模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。如果CPOL=0,串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。如果 CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。 SPI主模块和与之通信的外设音时钟相位和极性应该一致。
SPI时序图详解-SPI接口在模式0下输出第一位数据的时刻
SPI接口在模式0下输出第一位数据的时刻。
SPI接口有四种不同的数据传输时序,取决于CPOL和CPHL这两位的组合。图1中表现了这四种时序,
时序与CPOL、CPHL的关系也可以从图中看出。

CPOL是用来决定SCK时钟信号空闲时的电平,CPOL=0,空闲电平为低电平,CPOL=1时,空闲电平为高电平。CPHA是用来决定采样时刻的,CPHA=0,在每个周期的第一个时钟沿采样,CPHA=1,在每个周期的第二个时钟沿采样。由于我使用的器件工作在模式0这种时序(CPOL=0,CPHA=0),所以将图1简化为图2,只关注模式0的时序。
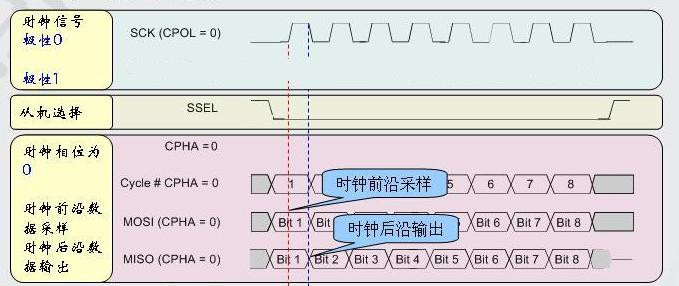
我们来关注SCK的第一个时钟周期,在时钟的前沿采样数据(上升沿,第一个时钟沿),在时钟的后沿输出数据(下降沿,第二个时钟沿)。首先来看主器件,主器件的输出口(MOSI)输出的数据bit1,在时钟的前沿被从器件采样,那主器件是在何时刻输出bit1的呢?bit1的输出时刻实际上在SCK信号有效以前,比 SCK的上升沿还要早半个时钟周期。bit1的输出时刻与SSEL信号没有关系。再来看从器件,主器件的输入口MISO同样是在时钟的前沿采样从器件输出的bit1的,那从器件又是在何时刻输出bit1的呢。从器件是在SSEL信号有效后,立即输出bit1,尽管此时SCK信号还没有起效。关于上面的主器件和从器件输出bit1位的时刻,可以从图3、4中得到验证。
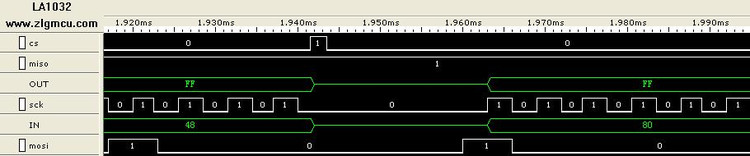
注意图3中,CS信号有效后(低电平有效,注意CS下降沿后发生的情况),故意用延时程序延时了一段时间,之后再向数据寄存器写入了要发送的数据,来观察主器件输出bit1的情况(MOSI)。可以看出,bit1(值为1)是在SCK信号有效之前的半个时钟周期的时刻开始输出的(与CS信号无关),到了SCK的第一个时钟周期的上升沿正好被从器件采样。
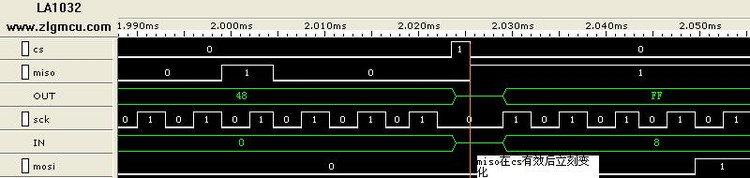
图4中,注意看CS和MISO信号。我们可以看出,CS信号有效后,从器件立刻输出了bit1(值为1)。
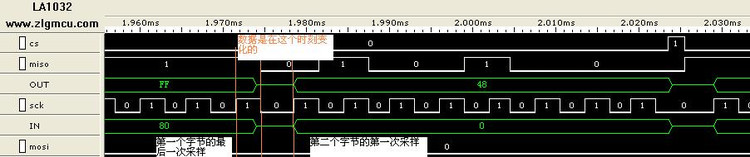
通常我们进行的spi操作都是16位的。图5记录了第一个字节和第二个字节间的相互衔接的过程。第一个字节的最后一位在SCK的上升沿被采样,随后的SCK下降沿,从器件就输出了第二个字节的第一位。
SPI总线协议介绍(接口定义,传输时序)
一、技术性能
SPI接口是Motorola 首先提出的全双工三线同步串行外围接口,采用主从模式(Master Slave)架构;支持多slave模式应用,一般仅支持单Master。
时钟由Master控制,在时钟移位脉冲下,数据按位传输,高位在前,低位在后(MSB first);SPI接口有2根单向数据线,为全双工通信,目前应用中的数据速率可达几Mbps的水平。
-------------------------------------------------------
二、接口定义
SPI接口共有4根信号线,分别是:设备选择线、时钟线、串行输出数据线、串行输入数据线。
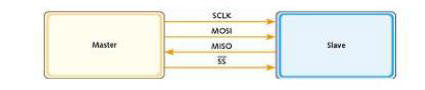
(1)MOSI:主器件数据输出,从器件数据输入
(2)MISO:主器件数据输入,从器件数据输出
(3)SCLK :时钟信号,由主器件产生
(4)/SS:从器件使能信号,由主器件控制
-------------------------------------------------------
三、内部结构
四、传输时序
SPI接口在内部硬件实际上是两个简单的移位寄存器,传输的数据为8位,在主器件产生的从器件使能信号和移位脉冲下,按位传输,高位在前,低位在后。如下图所示,在SCLK的下降沿上数据改变,上升沿一位数据被存入移位寄存器。
SPI接口没有指定的流控制,没有应答机制确认是否接收到数据。
五、GPIO模拟SPI
#include "s3c24xx.h"
/* 用GPIO模拟SPI */
static void SPI_GPIO_Init(void)
{
/* GPG2 CSn output
* GPG5 SPIMISO input
* GPG6 SPIMOSI output
* GPG7 SPICLK output
*/
GPGCON &= ~((3<<(2*2)) | (3<<(4*2)) | (3<<(5*2)) | (3<<(6*2)) | (3<<(7*2)));
GPGCON |= ((1<<(2*2)) | (1<<(4*2)) | (1<<(6*2)) | (1<<(7*2)));
GPGDAT |= (1<<2);
}
static void SPI_Set_CLK(char val)
{
if (val)
GPGDAT |= (1<<7);
else
GPGDAT &= ~(1<<7);
}
static void SPI_Set_DO(char val)
{
if (val)
GPGDAT |= (1<<6);
else
GPGDAT &= ~(1<<6);
}
static char SPI_Get_DI(void)
{
if (GPGDAT & (1<<5))
return 1;
else
return 0;
}
void SPISendByte(unsigned char val)
{
int i;
for (i = 0; i < 8; i++)
{
SPI_Set_CLK(0);
SPI_Set_DO(val & 0x80);
SPI_Set_CLK(1);
val <<= 1;
}
}
unsigned char SPIRecvByte(void)
{
int i;
unsigned char val = 0;
for (i = 0; i < 8; i++)
{
val <<= 1;
SPI_Set_CLK(0);
if (SPI_Get_DI())
val |= 1;
SPI_Set_CLK(1);
}
return val;
}
void SPIInit(void)
{
/* 初始化引脚 */
SPI_GPIO_Init();
}五、参考文献