百度飞桨零基础实践深度学习目标检测系列学习笔记
目标检测任务目的: 所属类别 + 目标位置
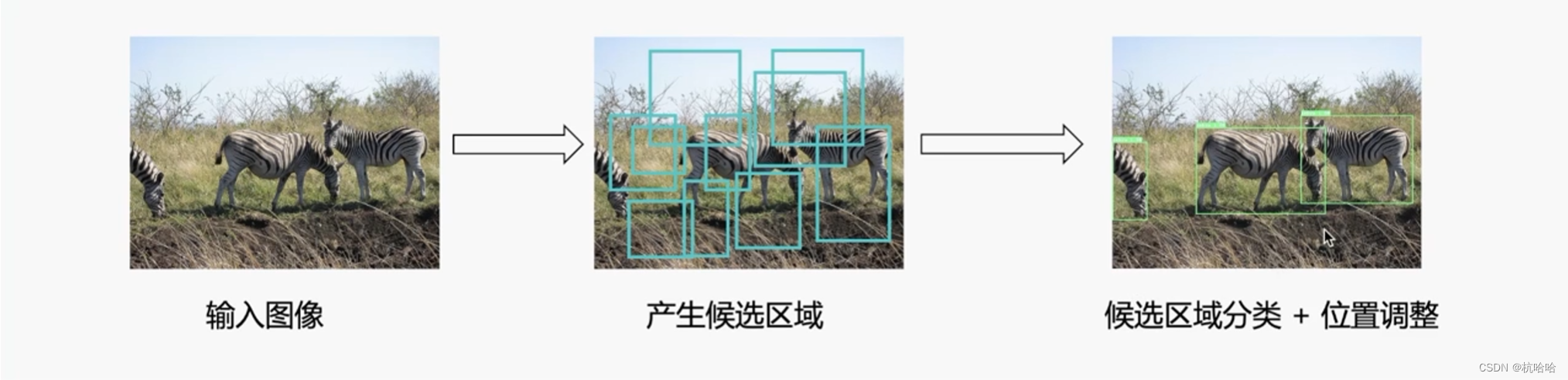
面对的核心问题:
1.如何产生候选区域 2.如何提取图像特征
目录
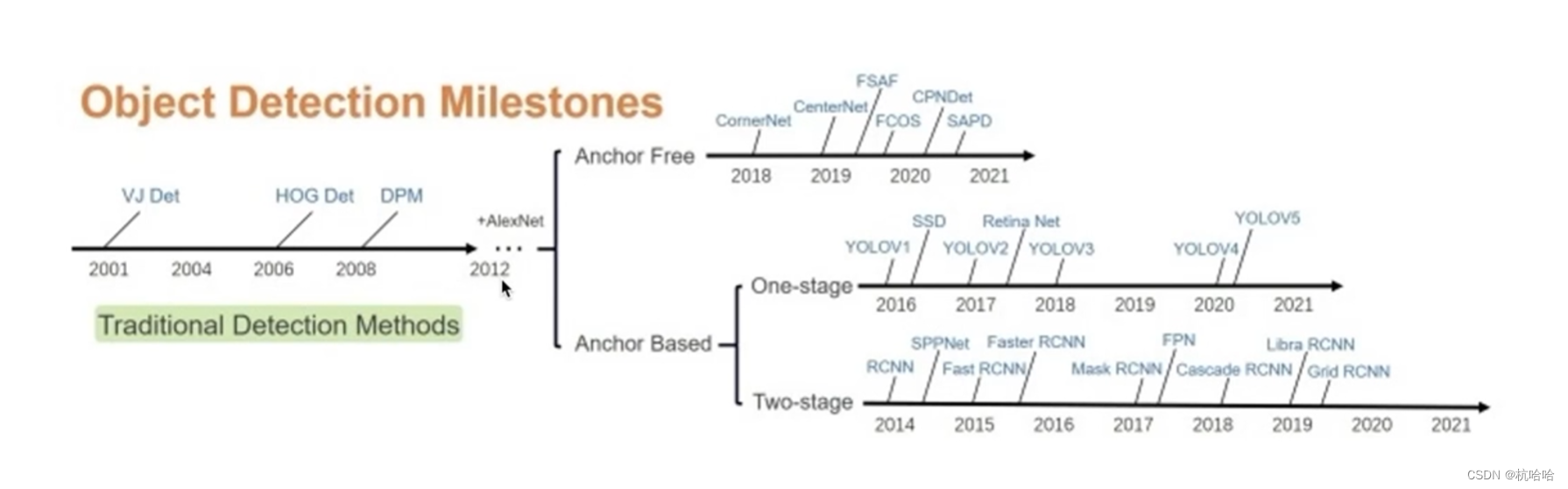
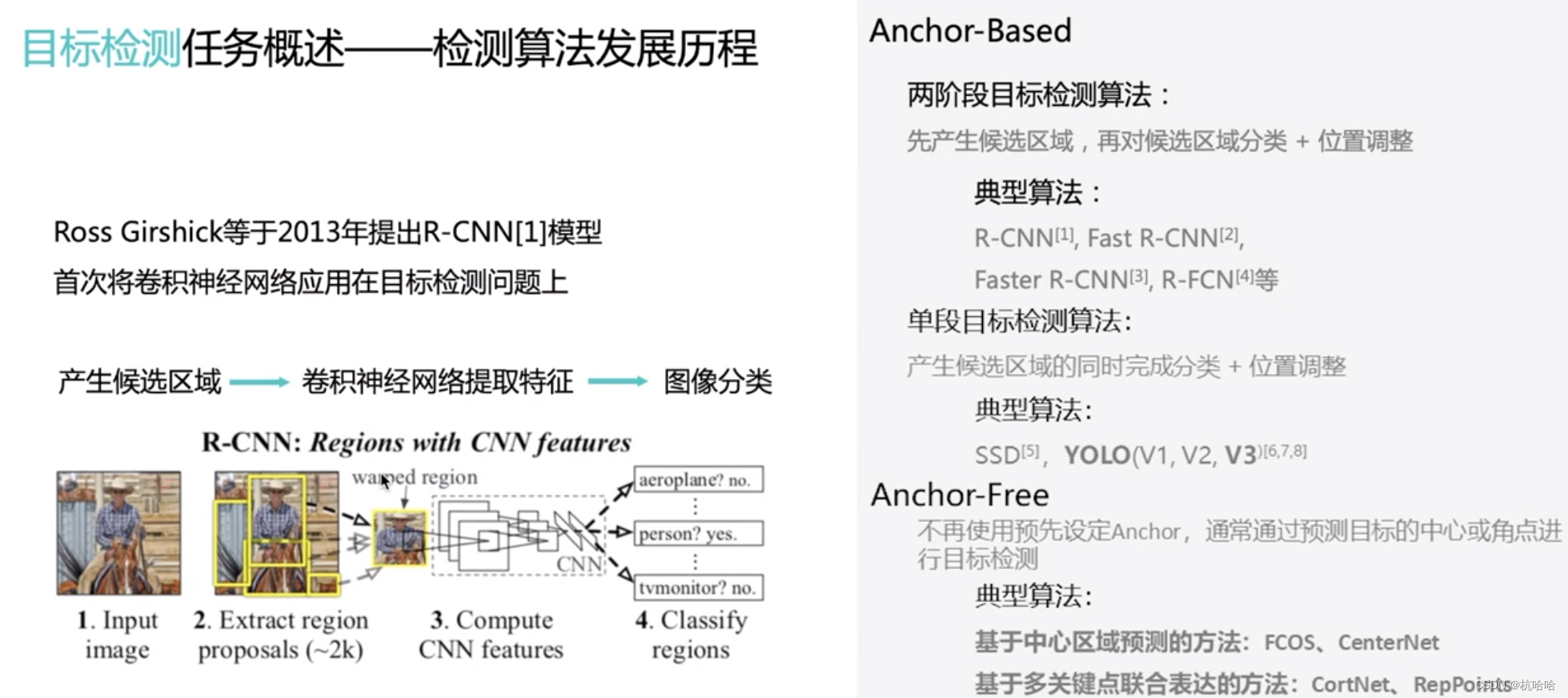
目标检测发展进程:
当前主要为两个方向:
(1):Anchor-Free
一种是基于中心点的方法,另一种是基于边界框的方法。
1.基于中心点的方法通常将每个像素点视为目标中心点的可能性,并在此基础上预测目标的大小和类别。
2.基于边界框的方法则直接从特征图中预测目标的边界框,而不需要预定义的锚框。
(2):Anchor-Based
在预测目标位置和大小时使用预定义的锚框(Anchor Box)或先验框(Prior Box)。
目标检测基础知识:
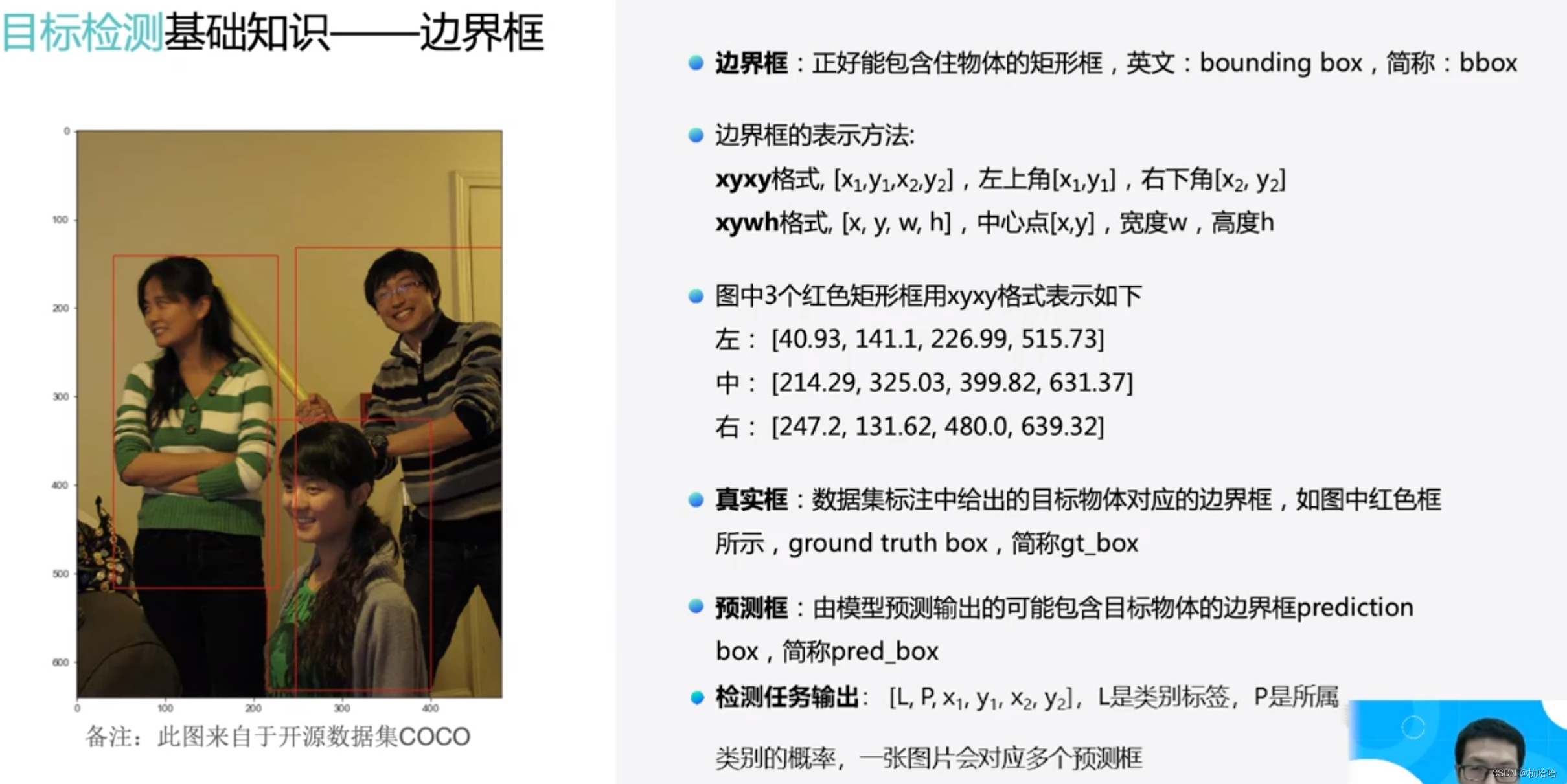
(1)边界框bbox
bbox用于标识出图像中的目标物体,并且通常与目标的类别一起表示。模型会根据输入的图像和bbox来预测目标的类别和位置,并输出相应的检测结果。
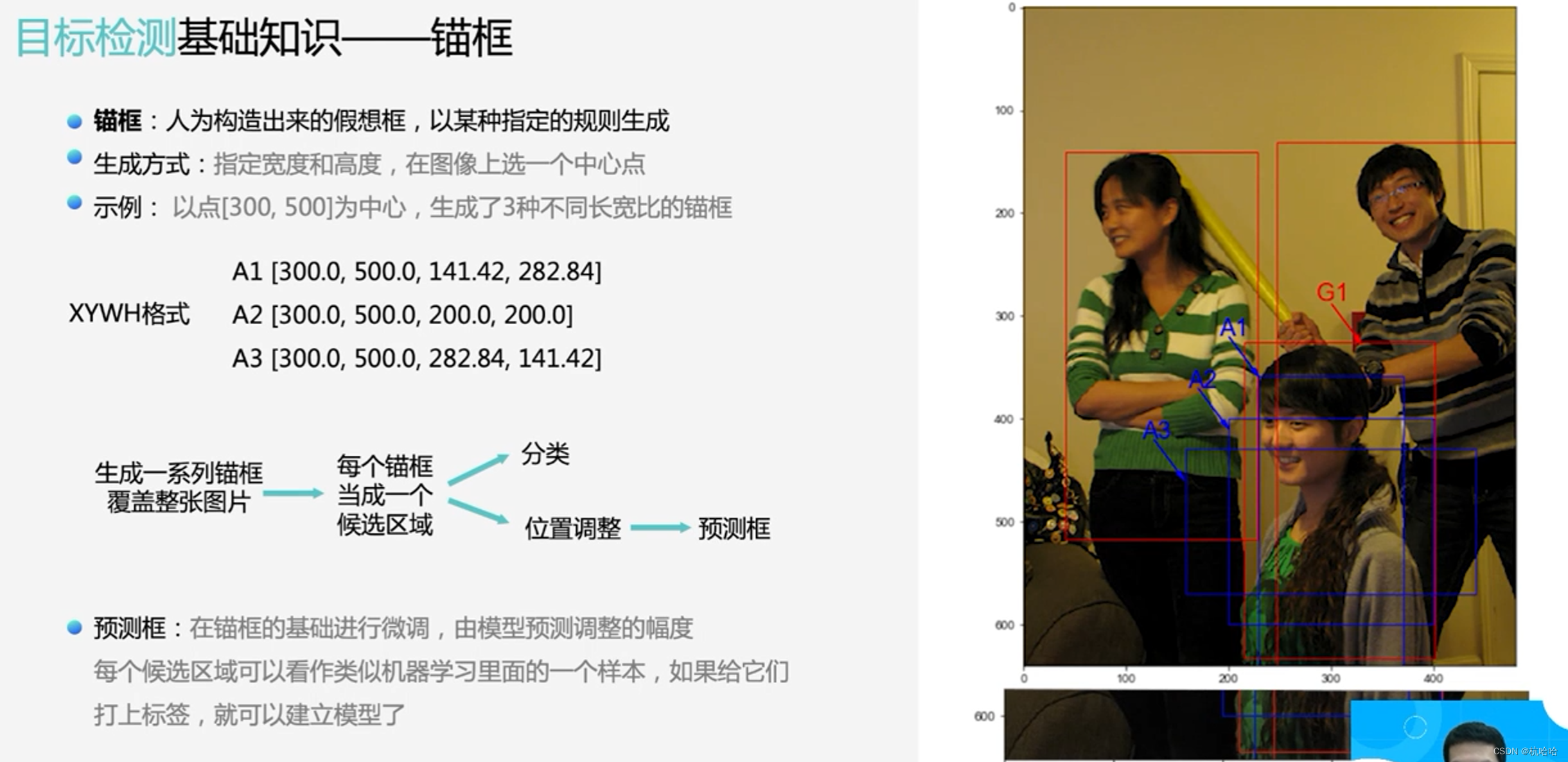
(2)锚框AnchorBox
锚框(Anchor Box),也称为先验框(Prior Box),是一种在目标检测中用于生成候选框的技术。锚框是一组预定义的框,每个框具有不同的尺寸和长宽比,用于尝试匹配输入图像中的不同目标。锚框通常是在输入图像的每个位置生成的,以尝试捕获不同尺度和长宽比的目标。
在目标检测的训练过程中,模型会根据预定义的锚框和实际目标的位置和大小进行训练,以学习如何预测目标的类别和位置。在推理过程中,模型会根据预测结果和锚框的位置和大小来确定目标的位置和大小。
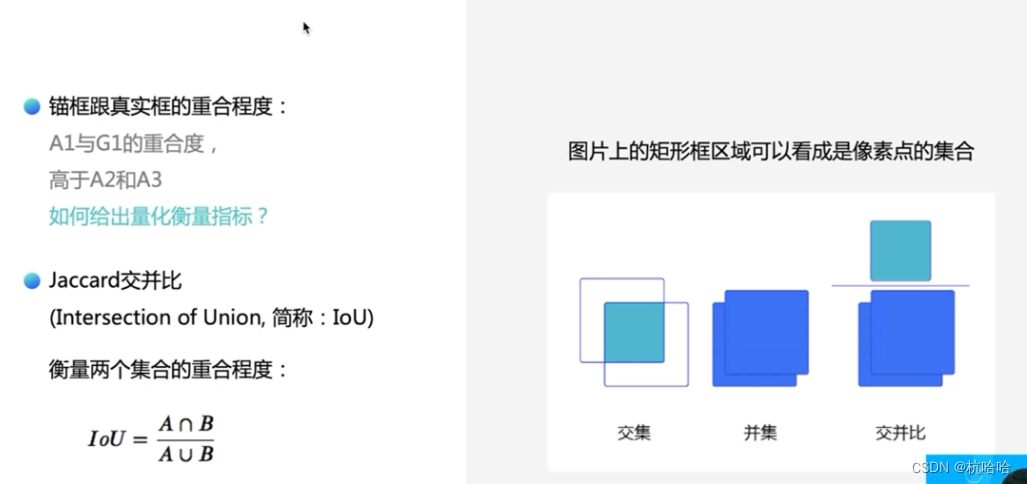
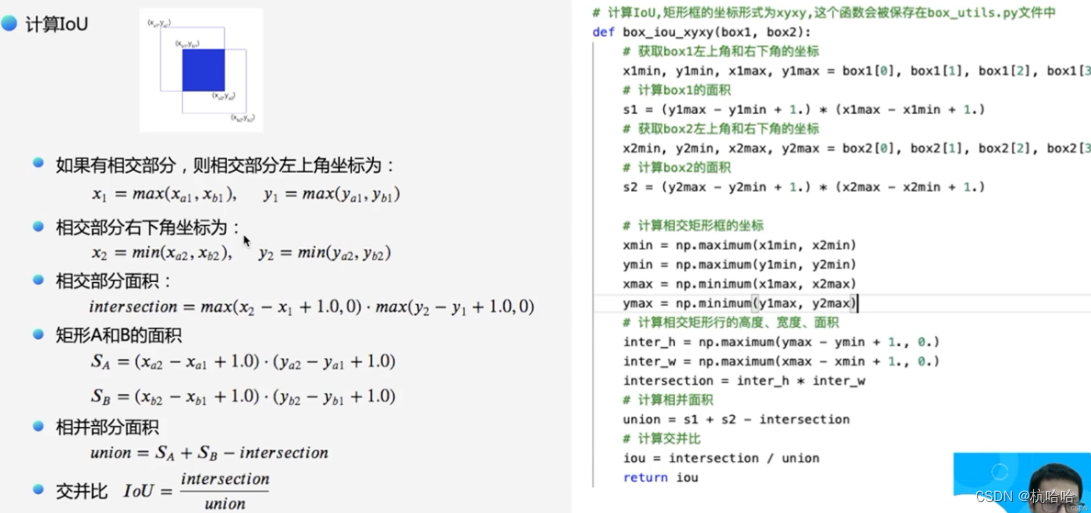
(3)交并比IOU
交并比(Intersection over Union,IoU)是一种用于评估目标检测算法性能的指标。在目标检测中,IoU通常用于衡量模型预测的边界框(bbox)与实际目标边界框的重叠程度。
IoU的计算公式为:IoU=交集面积/并集面积。
其中,交集面积是指模型预测的bbox和实际目标bbox之间的重叠部分面积,而并集面积是指两个bbox的面积加上它们的重叠部分面积。
通常情况下,IoU的阈值会根据具体的任务和需求进行设置,例如在目标检测中,通常将IoU阈值设置为0.5或0.7,以判断模型是否成功检测到目标。 除了用于评估模型性能外,IoU还可以用于一些目标检测算法中的bbox优化和调整,例如非极大值抑制(NMS)算法就是基于IoU的。
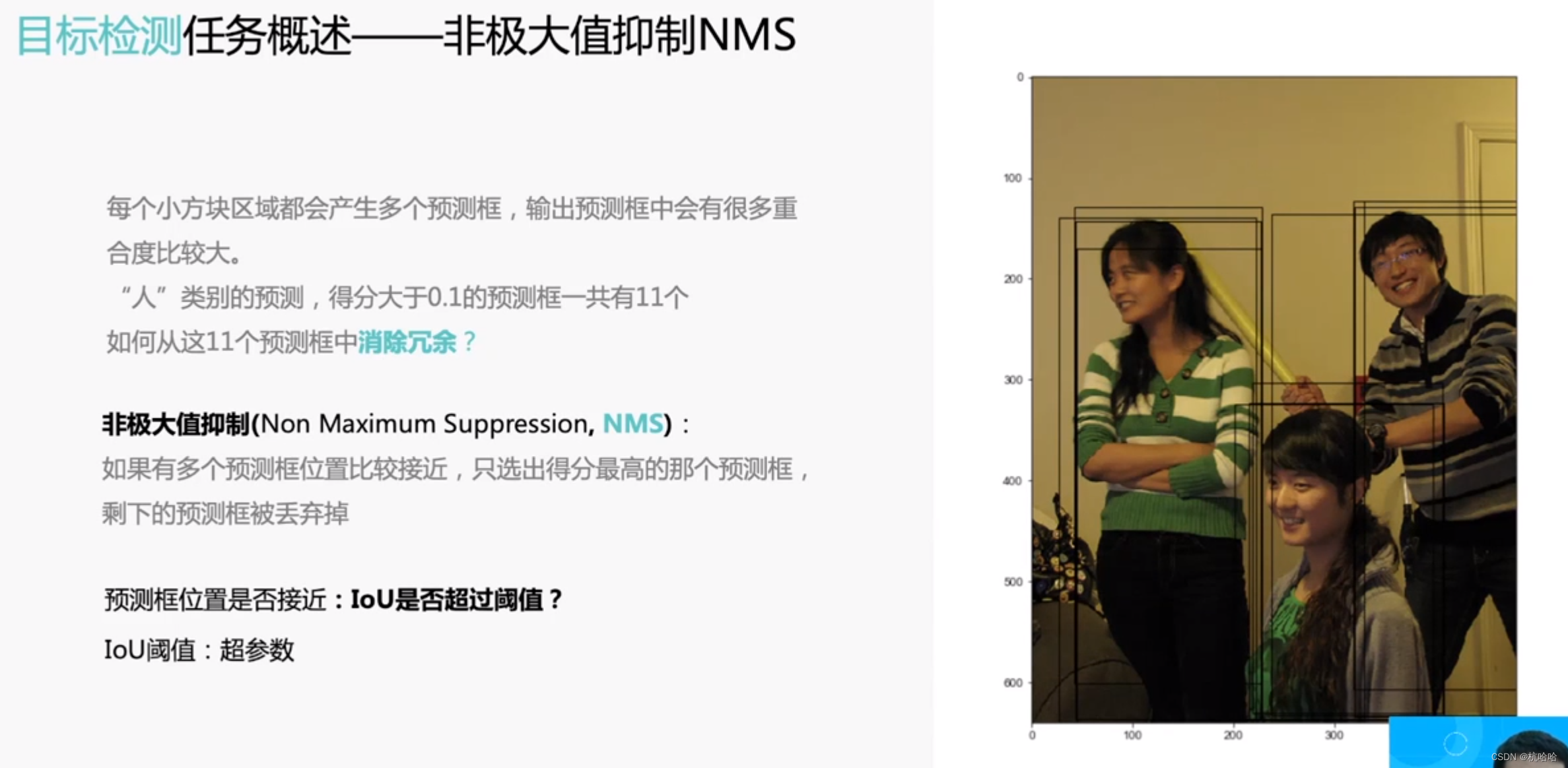
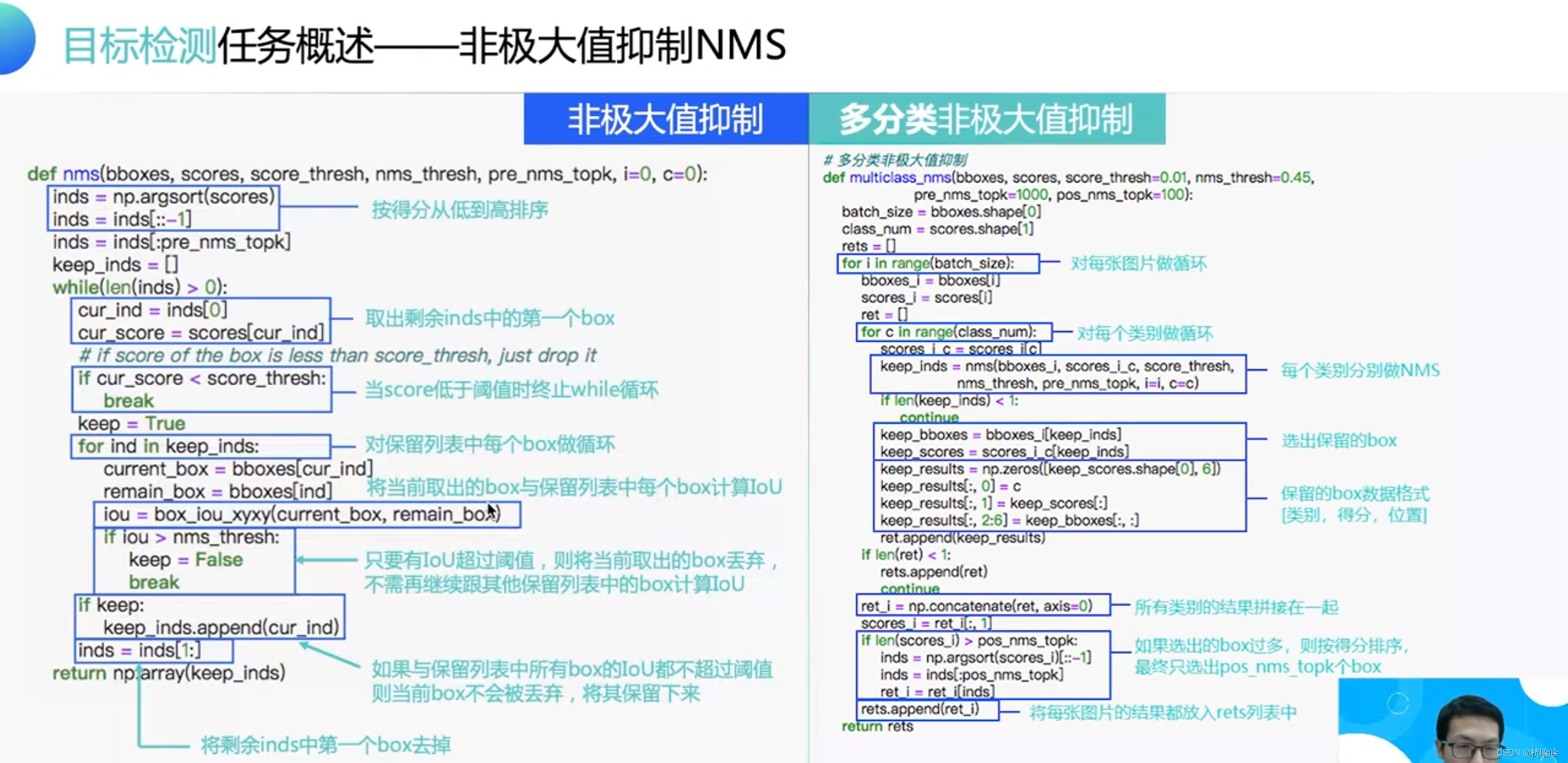
(4)非极大值抑制NMS
如果有多个预测框位置比较接近,只选出得分最高的那个预测框,剩下的预测框被丢弃掉。