接着之前45.在ROS中实现global planner(1)和46.在ROS中实现global planner(2)的铺垫,在ROS中实现AStar Global Planner
1. planner package
- 照着之前的模板,修改下名称
git clone -b https://gitee.com/pibot/sample_global_planner.git astar_global_planner
再替换下所有的sample_global_planner–>astar_global_planner
- 基于这个我们新增之前的
astar算法
拷贝astar_planner.h 和astar_planner.cpp 分别至include和src目录 - 修改
CMakeLists.txt- 添加编译
add_library(${ PROJECT_NAME} src/planner_node.cpp src/astar_planner.cpp # 新增 )- 添加opencv的依赖
find_package(catkin REQUIRED COMPONENTS costmap_2d OpenCV)c++11支持
使用了c++11 cmake打开配置
add_compile_options(-std=c++11)
直接编译试下
catkin_make -DCATKIN_WHITELIST_PACKAGES=astar_global_planner
头文件报错,稍微修改下
#include "astar_global_planner/astar_planner.h"
2. 规划实现
前面加入了编译,下面我们具体新增其的使用
2.1 添加AStarPlanner
-
把之前实现好的
AStarPlanner添加为GlobalPlanner的一个成员std::unique_ptr<AStarPlanner> planner_; // 这里我们指定为指针 -
初始化接口添加对其的实例化
planner_ = std::unique_ptr<AStarPlanner>(new AStarPlanner());
2.2 接口调用
AStarPlanner 主要的接口就是
bool Plan(const Mat& cost_map, const Point& start_point, const Point& end_point, std::vector<Point>& path, PlannerAction planner_action);
主要接收一个地图参数cost_map, 一个起点start_point,一个终点end_point, 输出为路径path
planner_action为回调函数 之前调试显示用,这里用不到, 传入nullptr
- 地图
地图参数在GlobalPlanner的initialize接口有指定,我们只需要在这里保存下来,保存至成员,后续函数中使用
void GlobalPlanner::initialize(std::string name, costmap_2d::Costmap2DROS* costmap_ros) {
costmap_ = costmap_ros->getCostmap();
int nx = costmap_->getSizeInCellsX(), ny = costmap_->getSizeInCellsY();
double resolution = costmap_->getResolution();
cv::Mat costmap_mat = cv::Mat(costmap_->getSizeInCellsY(), costmap_->getSizeInCellsX(), CV_8UC1, costmap_->getCharMap());
costmap_mat_ = costmap_mat.clone(); // costmap_mat_保存地图的拷贝
}
- 起点&终点
规划接口中传入了2个参数分别是起点和终点,但需要注意传入的点的坐标系为世界坐标系,并非地图的坐标,所以需要做转换,initialize传入参数costmap_ros带有转换接口worldToMap直接调用即可,如下
unsigned int start_x_i, start_y_i, goal_x_i, goal_y_i;
double wx = start.pose.position.x;
double wy = start.pose.position.y;
costmap_->worldToMap(wx, wy, start_x_i, start_y_i);
wx = goal.pose.position.x;
wy = goal.pose.position.y;
costmap_->worldToMap(wx, wy, goal_x_i, goal_y_i)
- 执行规划
只需要调用AStarPlanner的Plan接口,传入相应的参数即可
std::vector<Point> path;
bool vaild = planner_->Plan(costmap_mat_, {
start_x_i, start_y_i}, {
goal_x_i, goal_y_i}, path, nullptr);
- 输出路径
同起点&终点相反,这里输出路径保存的是地图坐标,所有需要转换到世界坐标返回,同样使用costmap_ros的下mapToWorld接口即可
另外AStarPlanner Plan接口输出的路径是从终点到起点的,这里需要反序列后输出
bool GlobalPlanner::makePlan(const geometry_msgs::PoseStamped& start,
const geometry_msgs::PoseStamped& goal,
std::vector<geometry_msgs::PoseStamped>& plan) {
...
geometry_msgs::PoseStamped pose = goal;
// 使用path反向迭代器循环
for (auto it = path.rbegin(); it != path.rend(); it++) {
costmap_->mapToWorld(it->x, it->y, pose.pose.position.x, pose.pose.position.y);
plan.push_back(pose);
}
// plan 即为需要返回和pub的路径
....
}
3. 测试
-
修改
move_base_params.yaml中的base_global_plannerbase_global_planner: astar_global_planner/GlobalPlanner -
启动模拟器
pibot_simulator -
查看插件是否加载
❯ rosparam get /move_base/base_global_planner astar_global_planner/GlobalPlanner -
打开
rviz查看
pibot_view
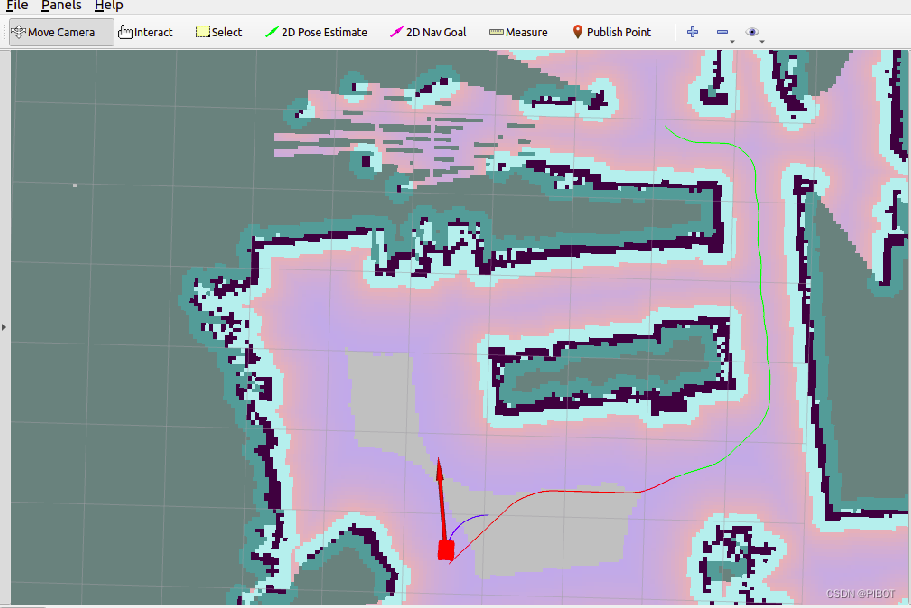
可以看出来
AStar Global Planner已经生效了,规划路径也出来了, 很不幸的是local planner一直无法正常运行,显然这个路径规划的太贴近障碍物。导致规划的结果无法在实际机器人场景使用, 后续我们看看如何做优化。
4. 优化
4.1 规划优化
我们的A* 算法没有考虑到障碍无的距离,导致可能紧挨着障碍物,我们需要在启发函数新增里障碍物的距离值,以使得规划路径尽量远离障碍物。
在ROS中的地图是cost map,所谓cost map也就是每个grid点有自己的cost, 如官方的这张图片
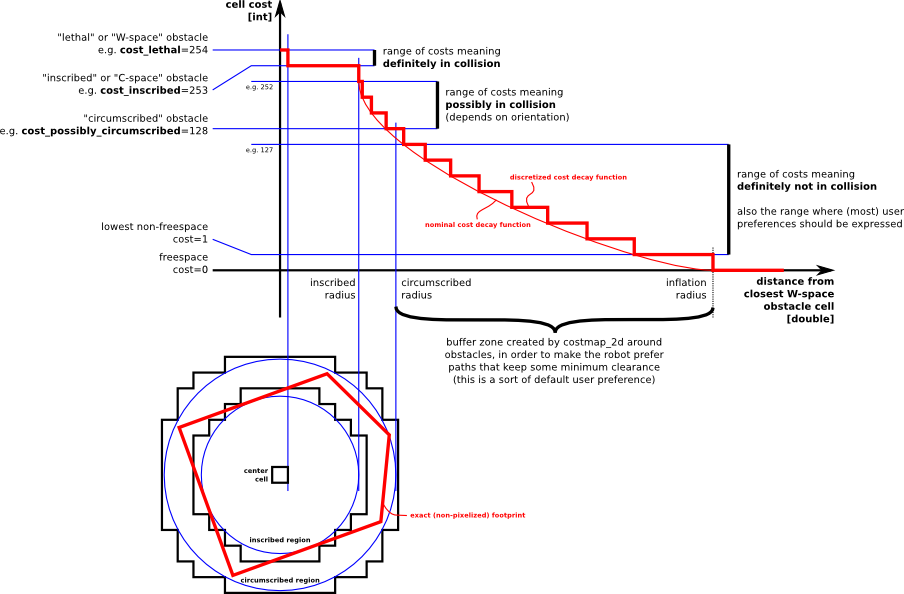
简单的说在ROS中,未知区域值255, 障碍物为254,其他就是远离障碍物就越越小
-
这样我们在计算H的函数新增个参数,同时添加相应的
weightfloat Point2PointPlanner::CalcH(const Point& current_point, const Point& end_point) { ... return min_diff * kCornerCost + (max_diff - min_diff) * kLineCost; }改为
float Point2PointPlanner::CalcH(const Point& current_point, const Point& end_point, float cost) { ... return min_diff * kCornerCost + (max_diff - min_diff) * kLineCost + cost * kCost; } -
计算时传入每个
grid的cost... open_list_.emplace(start_point, 0, CalcH(start_point, end_point, cost_map_.at<unsigned char>(start_point.y, start_point.x))); ...` all_grid_[index].Update(neighbor, point, G, CalcH(neighbor, end_point, cost_map_.at<unsigned char>(neighbor.y, neighbor.x))); ...
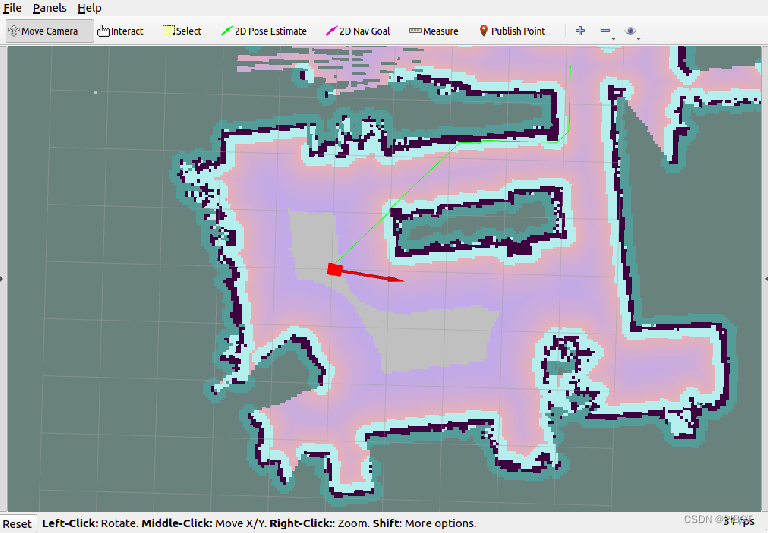
再次编译测试,结果如下图,可以看到规划的路径在道路中间,并且local planner可以正常工作。`

4.2 路径优化
可以看到,规划的路径是还存在瑕疵,路径是锯齿状的,对local planner的控制有一定影响,我们可以添加平滑处理,使得路径更为平滑
参考ROS:一种简单的基于global_planner的全局路径优化方法得到效果如下