ROS高级组件之 TF坐标变换 其一
1 资料
从本文开始,我们使用三个博客学习TF坐标变化,TF即transform,话说电影变形金刚的英文就是transformer。
本文的参考资料如下:
(1)《ROS机器人开发实践》胡春旭 第4章第二节
(2)右手坐标系:机器人中的xyz坐标系和右手定则
(3)欧拉角与四元数:
详解 欧拉角与四元数
四元数与欧拉角(RPY角)的相互转换
四元数与欧拉角(Yaw、Pitch、Roll)的转换
2 正文
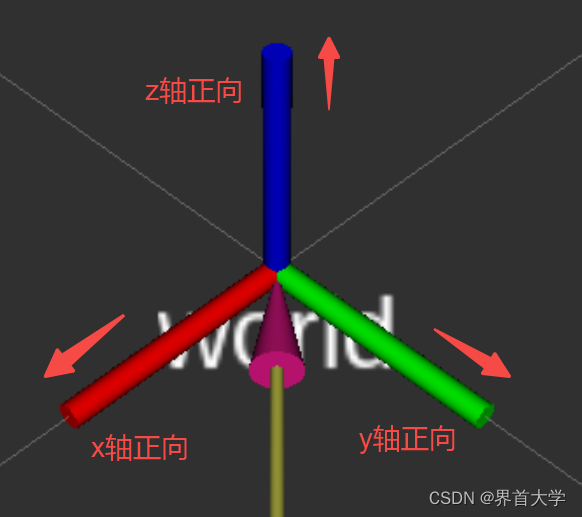
2.1 右手坐标系
机器人和自动驾驶领域,所有的坐标系都是右手坐标系:伸出右手,从x轴正向向y轴正向握,大拇指的方向就是z轴正向。

2.2 欧拉角
在三维空间中,Roll、Pitch 和 Yaw 是描述物体旋转的三个基本角度,也被称为欧拉角。
欧拉角用来描述一个物体相对于自身原始坐标系的旋转变化,以飞机举例,其自身原始三维坐标系是:机身沿着x轴,机头朝向x轴正方向,根据右手定则,y轴在飞机的左侧,z轴在飞机的上面。
(1)Roll(横滚):物体绕其本身的x轴旋转的角度。
(2)Pitch(俯仰):物体绕其本身的y轴旋转的角度。
(3)Yaw(偏航):物体绕其本身的z轴旋转的角度。
这里有一个组图,也可以帮助理解欧拉角:

2.3 欧拉角与四元数
欧拉角和四元数都用来描述物理在三维空间内的旋转,这里进行比较:
(1)欧拉角用三个旋转角度,直观清晰,但会有万向节锁死的问题。具体见:详解 欧拉角与四元数
(2)四元数描述一个物体的旋转,使用旋转向量 + 旋转角度的组合,向量用x,y,z表示,角度用w,即q=(x,y,z,w),也就是四元数。而且其中的x,y,z是个复数,即:q=xi+yj+zk+w, i2 = j2 = k2 = -1。
(3)四元数有运算效率高,无万向节死锁问题,且方便进行插值运算等优点。但由于四元数无法直观从物理意义上理解,很抽象,因此,通常情况下,人们使用欧拉角描述旋转,需要运算时,再转换为四元数。
(4)四元数与欧拉角之间有一套固定的矩阵运算转换公式(这里不深究,也确实不好懂):四元数与欧拉角(Yaw、Pitch、Roll)的转换
2.4 TF 软件包的由来
一个机器人通常有很多个坐标系:手部,脚部,头部,关节等等
一个自动驾驶车辆(也属于机器人系统)往往有很多个坐标系,比如:
(1)通用横轴墨卡托投影(UTM,GPS坐标一般会转化为这个坐标值)
(2)lidar坐标系:lidar的点云数据都是用这个坐标系描述的
(3)radar坐标系(多个):同上
(4)相机坐标系(多个):同上
(5)imu的坐标系:
(6)车体坐标系:原点位于后轴中心
(7)当地水平坐标系:ENU,俗称世界坐标系
自动驾驶车辆所有的传感器和GPS数据,都是相对于自身坐标系的值。使用时,需要转换到同一个坐标系,才能使用,一般选取ENU坐标系,不然就是散乱的无效数据。
通常情况下,两个三维坐标系的转换包括平移和旋转,平移关系比较简单,也就是两个坐标原点之间的移动关系;而旋转关系比较复杂,需要使用欧拉角和四元数。
机器人系统的三维坐标系的数据转换是非常复杂的,ros提供了 TF 包来解决这个棘手的问题,避免开发者手动进行坐标变换。
2.5 以turtle_tf为例学习 TF 包
ROS 提供了 turtle_tf 作为样例,供开发者学习 TF 软件包的基本原理。
(1)运行 turtle_tf 样例
roslaunch turtle_tf turtle_tf_demo.launch
rosrun turtlesim turtle_teleop_key
// 如果rviz无显示,看这个博客:https://www.codestudyblog.com/cs2201ai/40115063750.html
rosrun rviz rviz 'rospack find turtle_tf' /rviz/turtle_rviz.rviz
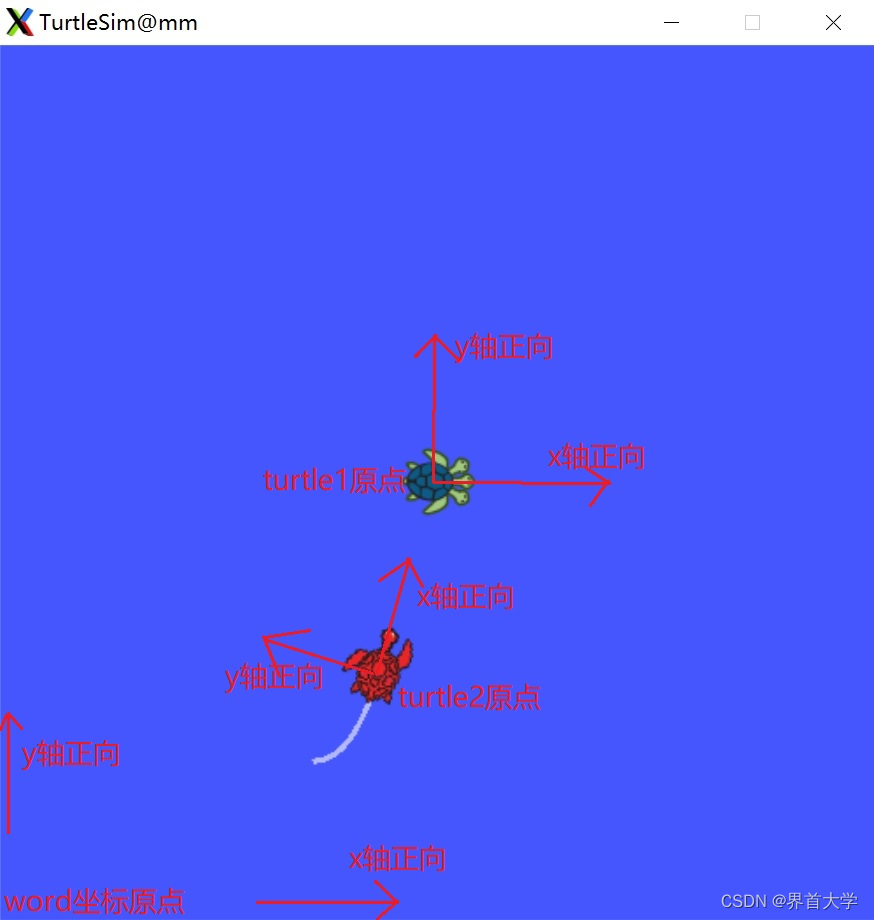
turtle_tf 设计了两个乌龟,操作者使用键盘控制第一个乌龟的移动,第二个乌龟会主动跟上去,如下图。

(2)turtle_tf 的三个坐标系
world坐标系:原点位于窗口的左下角,x轴从原点出发,朝向右侧;y轴从原点出发,朝向上侧;根据右手定则,z轴垂直于屏幕,朝向人;由于仿真环境是二位的,所以z轴不需要考虑。
turtle1坐标系:turtle1自身坐标系,turtle1沿着x轴,头部朝向x轴正方形,y轴在turtle1左侧,z轴在turtle1上面(不用考虑)
turtle2坐标系:turtle2自身坐标系,同turtle1
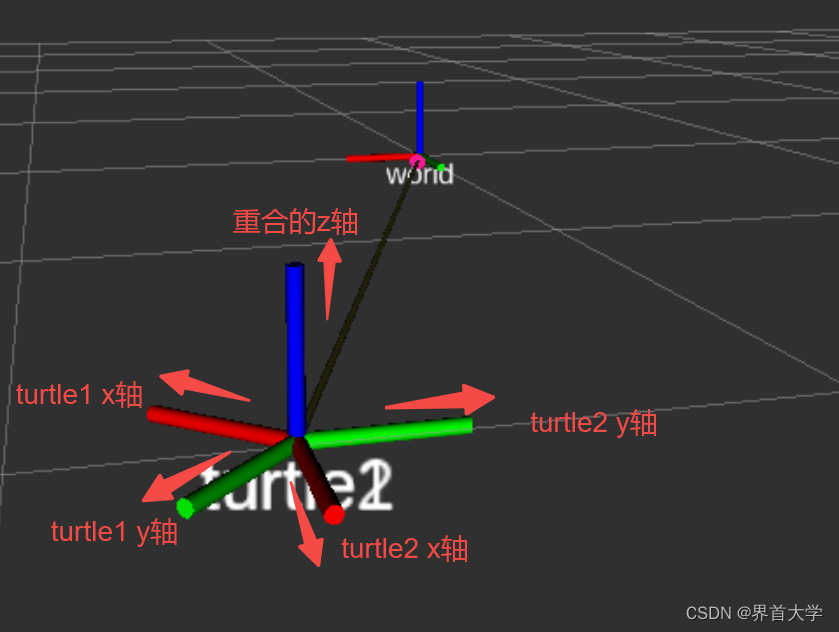
在rviz里,三个坐标系长这样(注意:两个截图并不是同一时刻):
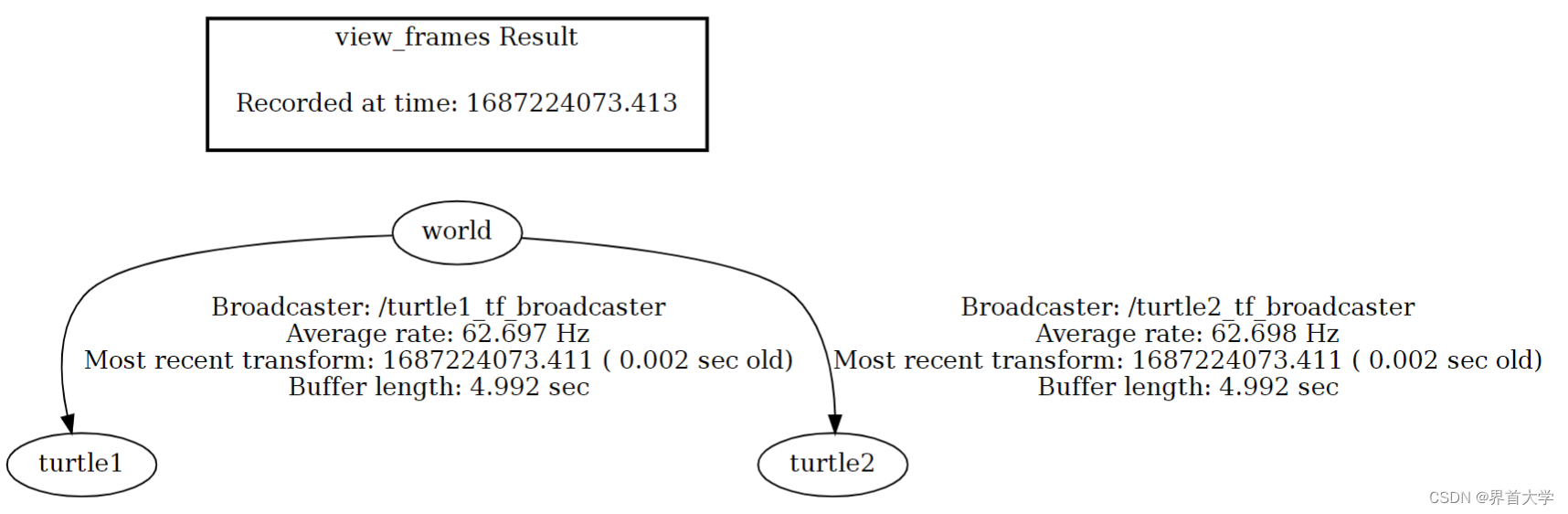
(3)TF 软件包管理坐标系的逻辑:TF 坐标系树
TF 包会把各个坐标系在内部组织成坐标系树。如 turtle_tf 包,坐标系树根节点是world坐标系,左右子节点是两个turtle的自身坐标系。两个turtle各自创建自己的 TF 广播器,把自身坐标系与world坐标系的tf数据广播出来,TF 包就能实时建立坐标系树。
执行下面的指令,导出turtle_tf 的TF 坐标系树:
// ubuntu20.04执行下面命令会崩溃,解决方式:https://github.com/ros/geometry/pull/193
rosrun tf view_frames
(4)有了 TF 坐标系树,可以通过创建 TF 监听器,实时获取turtle1 相对于turtle2 坐标系的平移和旋转关系。执行下面的指令:
rosrun tf tf_echo turtle2 turtle1
运行输出:
At time 1688002771.829
// 平移向量,也就是两个坐标原点的平移,即在turtle2坐标系下,turtle1的位置
- Translation: [-0.403, 0.072, 0.000]
// 四元数描述的旋转关系,即在turtle2坐标系下,turtle1的朝向
- Rotation: in Quaternion [0.000, 0.000, -0.089, 0.996]
// 弧度描述的欧拉角,因为是二维平面,只有yaw(绕z轴)角有值
in RPY (radian) [0.000, 0.000, -0.178]
// 角度描述的欧拉角
in RPY (degree) [0.000, 0.000, -10.174]
利用获取到的坐标变化关系,turtle2就能实时的跟着turtle1跑,具体的实现见 ROS高效进阶第一章 – ROS高级组件之 TF坐标变换 其二。
2.6 理解turtlesim::Pose和geometry_msgs/Twist
在 ROS高效入门系列中,我们写了很多样例,都用到了 turtlesim::Pose和geometry_msgs/Twist 消息。前者的topic名为:/turtle1/pose,用来描述turtle1的位置信息;后者的topic名为:/turtle1/cmd_vel,用来控制turtle1的运行。
由于之前没有坐标系的知识,我们对这两个消息的数据域理解并不深入,这里我们深入分析下
(1)turtlesim::Pose是一个定义了在world坐标系下,乌龟位置和朝向的消息类型。它包含如下五个字段:
x,y:是world坐标系下的位置
theta:是world坐标系下,乌龟相对于z轴的旋转;
如果乌龟头朝向world坐标系x轴正向,则theta为0;
逆时针旋转时,theta增加,最大为pi;
顺时针旋转时,theta减小,最小为-pi
linear_velocity:线速度,米每秒
angular_velocity:角速度,弧度每秒
(2)geometry_msgs/Twist的域是两个向量:
geometry_msgs/Vector3 linear // turtle相对于自身坐标系的线速度向量
float64 x // 沿x轴方向的线速度(m/s),正值为前进,负值为后退
float64 y // 沿y轴方向的线速度(m/s),由于turtle永远沿着自身坐标系x轴朝向正方向,不会侧向运动,因此此值一直为0
float64 z // 沿z轴方向的线速度(m/s),由于turtle位于二维平面内,不会上下运动,因此此值一直为0
geometry_msgs/Vector3 angular // turtle相对于自身坐标系的角速度向量
float64 x // 绕x轴的角速度(以弧度/秒为单位),由于turtle不会绕x轴旋转,因此为零
float64 y // 绕y轴的角速度(以弧度/秒为单位),由于turtle不会绕y轴旋转,因此为零
float64 z // 绕z轴的角速度(以弧度/秒为单位),表示turtlez左转(正值),右转(负值)
// 这条命令是让turtle1顺时针画圆,圆半径就是r = v / w = 2.0 m/s / 1.8 rad/s ~= 1.11 m
rostopic pub /turtlesim1/turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
3 总结
这节我们从数学出发,系统梳理了三维坐标变化的知识,并利用 ros 自带的 turtle_tf 初步学习了 TF 软件包的原理。基于本节的知识,下节我们将手动实现一个 turtle_tf 样例,掌握 TF 库的接口调用,掌握 TF广播器和 TF监听器的编写方法,见 ROS高效进阶第一章 – ROS高级组件之 TF坐标变换 其二