目前有不少博客已经写过了使用MATLAB完成相机和激光雷达的标定,但是在做的时候发现和官方以及其他博客中写的已经不同了。MATLAB已经可以实现直接由图像和点云直接输出外参(无需再手动导入相机内参)的整个过程。
和之前所有版本不同,本版本无需像之前一样不留空白(当然仍然推荐不留空白),上下左右都可以使用padding(如下图)。并且无需再输入长于宽(之前如6*8)

关于标定板的制作这里姐不在赘述,大家根据需求定制,值得注意的是不要形变太大即可。
关于如何提取图像和点云并转成pcd格式可以参考:
https://github.com/young147/capture_pcd_img
将其编译在你的catkin_ws/src中,值得注意的是上述代码中:
删除.jpg后的endl否则导入电脑会出现格式错误。

导入数据后可以选择手动导入相机内参或者自动运行即可。

剔除outlier,再次标定可以得到重投影效果,并export外参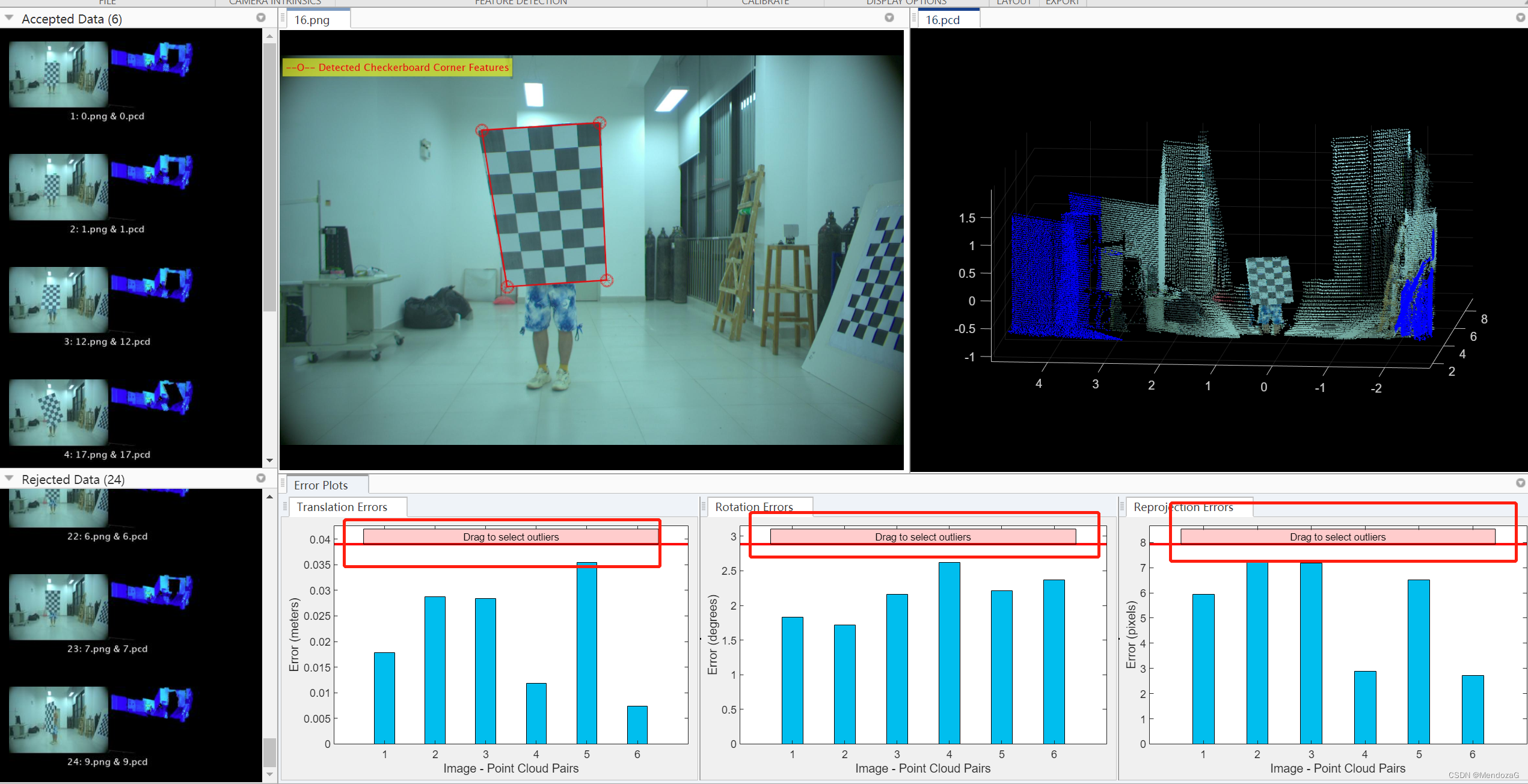
可以看到未被接受的数据也有较好的效果:


