相机位姿
相机位姿估计是指给定若干图像,估计其相机运动的问题。求解方法通常分为特征点法和直接法。
1、特征点法
特征点法的思路是先从图像当中提取许多特征,然后在图像间进行特征匹配,这样就得到许多匹配好的点,再根据这些点进行相机位姿的求解。根据传感器形式的不同,可以分成三种情况:
(1)2D-2D:单目相机获取的图像,只能获取像素坐标
(2)3D-3D配对点: RGBD图像或双目相机,可以获取深度信息
(3)3D-2D:已知一张图中的3D信息,另一张图只有2D信息
从问题的角度分析:
在两帧各自的相机坐标系中,设P点的相机坐标系的坐标分别为P1、P2,如图1所示。
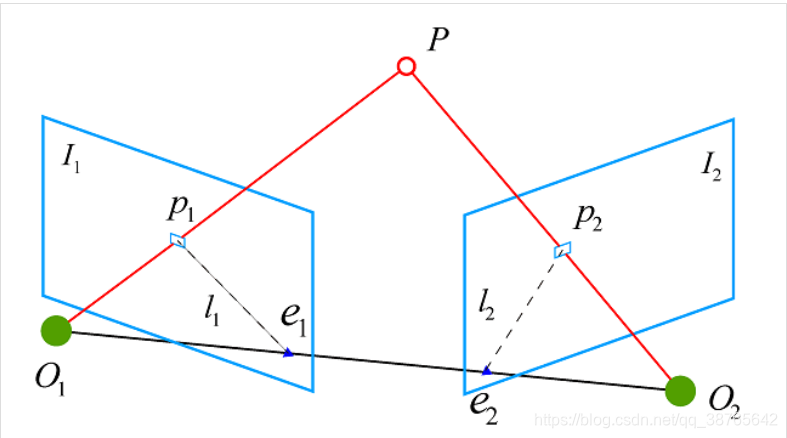
其中 ,
P1=(X1 Y1 Z1),P2=(X2 Y2 Z2)
相机从第一帧移动到第二帧,其旋转矩阵设为R,平移向量设为t。这里的R表示的旋转是相对于第一帧的姿态改变量。那么有:
P2=RP1+t
相机位姿估计的最终目的就是要根据这个运动方程,求解出相机的运动,也就是R、t。注意这里的R、t并不是相机外参!
由于P1、P2的坐标未知,但其在像素坐标系的坐标p1、p2已知,因此,根据小孔成像模型寻找p1、p2和P1、P2之间的关系。
2、小孔成像模型
小孔成像模型的示意图如图2所示。设P点在世界坐标系下坐标为Pw,在相机坐标系下坐标为Pc,物理成像平面对应坐标为 P′, 像素平面对应坐标为p, 有:
p=(u v),P‘=(X‘ Y‘ Z‘),Pc=(Xc Yc Zc),Pw=(Xw Yw Zw)
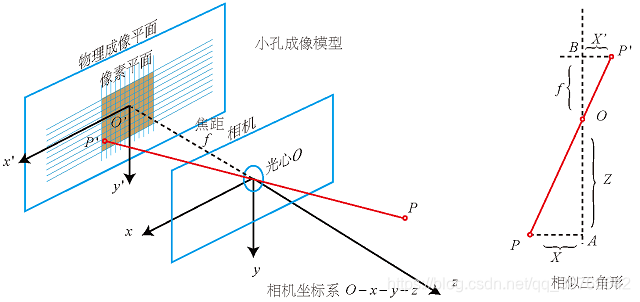
根据小孔成像模型,有如下公式:

该公式给出了点P相机坐标系下坐标与像素平面坐标之间的关系。
其余解释详细见