中值滤波器(Median Filter)
中值滤波的思想就是比较一定领域内的像素值的大小,取出其中值作为这个领域的中心像素新的值。假设对一定领域内的所有像素从小到大进行排序,如果存在孤立的噪声点,比如椒盐噪声(椒噪声——较小的灰度值,呈现的效果是小黑点;盐噪声——较大的灰度值,呈现的效果是小白点),那么从小到大排序的这个数组中,那些孤立的噪声一定会分布在两边(要么很小,要么很大),这样子取出的中值点可以很好地保留像素信息,而滤除了噪声点的影响。
中值滤波器受滤波窗口大小影响较大,用于消除噪声和保护图像细节,两者会存在冲突。如果窗口较小,则能较好地保护图像中的一些细节信息,但对噪声的过滤效果就会打折扣;反之,如果窗口尺寸较大则会有较好的噪声过滤效果,但也会对图像造成一定的模糊效果,从而丢失一部分细节信息。另外,如果在滤波窗口内的噪声点的个数大于整个窗口内像素的个数,则中值滤波就不能很好的过滤掉噪声。
本文福利,莬费领取Qt开发学习资料包、技术视频,内容包括(Qt实战项目,C++语言基础,C++设计模式,Qt编程入门,QT信号与槽机制,QT界面开发-图像绘制,QT网络,QT数据库编程,QT项目实战,QSS,OpenCV,Quick模块,面试题等等)↓↓↓↓↓↓见下面↓↓文章底部点击莬费领取↓↓
自适应中值滤波器(Adaptive Median Filter)
在噪声密度不是很大的情况下(根据经验,噪声的出现的概率小于0.2),使用中值滤波的效果不错。但是当噪声出现的概率比较高时,原来的中值滤波算法就不是很有效了。只有增大滤波器窗口尺寸,尽管会使图像变得模糊。
使用自适应中值滤波器的目的就是,根据预设好的条件,动态地改变中值滤波器的窗口尺寸,以同时兼顾去噪声作用和保护细节的效果。
下面是自适应中值滤波器算法的详细描述:
预先定义好以下符号:
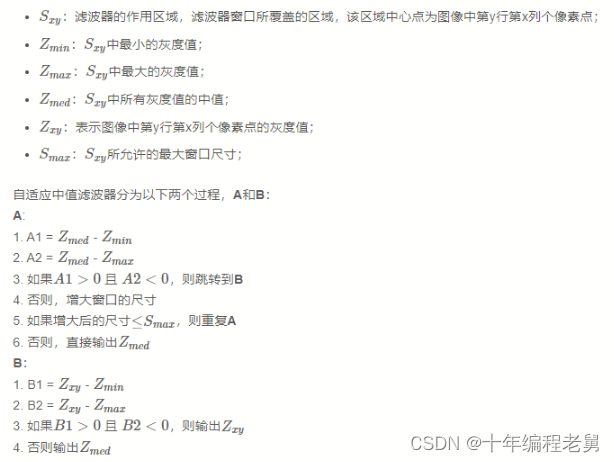
直观解释
在自适应中值滤波算法中,A步骤里面会先判断是否满足Zmin<Zmed<ZmaxZmin<Zmed<Zmax。这一步骤实质是判断当前区域的中值点是否是噪声点,通常来说是满足Zmin<Zmed<ZmaxZmin<Zmed<Zmax这个条件的,此时中值点不是噪声点,跳转到B;考虑一些特殊情况,如果Zmed=ZminZmed=Zmin或者Zmed=ZmaxZmed=Zmax,则认为是噪声点,应该扩大窗口尺寸,在一个更大的范围内寻找一个合适的非噪声点,随后再跳转到B,否则输出的中值点是噪声点;
接下来考虑跳转到B之后的情况:判断中心点的像素值是否是噪声点,判断条件为Zmin<Zxy<ZmaxZmin<Zxy<Zmax,原理同上,因为如果Zxy=ZminZxy=Zmin或者Zxy=ZmaxZxy=Zmax,则认为是噪声点。如果不是噪声点,我们可以保留当前像素点的灰度值;如果是噪声点,则使用中值替代原始灰度值,滤去噪声。
程序实现
程序中定义了产生椒噪声和盐噪声函数,以及中值滤波和自适应中值滤波的函数。
程序很基础,不做赘述。
#include <stdio.h>
#include <opencv2/opencv.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
//盐噪声
void saltNoise(cv::Mat img, int n)
{
int x, y;
for (int i = 0;i < n / 2;i++)
{
x = std::rand() % img.cols;
y = std::rand() % img.rows;
if (img.type() == CV_8UC1)
{
img.at<uchar>(y, x) = 255;
}
else if (img.type() == CV_8UC3)
{
img.at<cv::Vec3b>(y, x)[0] = 255;
img.at<cv::Vec3b>(y, x)[1] = 255;
img.at<cv::Vec3b>(y, x)[2] = 255;
}
}
}
//椒噪声
void pepperNoise(cv::Mat img, int n)
{
int x, y;
for (int i = 0;i < n / 2;i++)
{
x = std::rand() % img.cols;
y = std::rand() % img.rows;
if (img.type() == CV_8UC1)
{
img.at<uchar>(y, x) = 0;
}
else if (img.type() == CV_8UC3)
{
img.at<cv::Vec3b>(y, x)[0] = 0;
img.at<cv::Vec3b>(y, x)[1] = 0;
img.at<cv::Vec3b>(y, x)[2] = 0;
}
}
}
// 中值滤波器
uchar medianFilter(cv::Mat img, int row, int col, int kernelSize)
{
std::vector<uchar> pixels;
for (int y = -kernelSize / 2;y <= kernelSize / 2;y++)
{
for (int x = -kernelSize / 2;x <= kernelSize / 2;x++)
{
pixels.push_back(img.at<uchar>(row + y, col + x));
}
}
sort(pixels.begin(), pixels.end());
auto med = pixels[kernelSize*kernelSize / 2];
return med;
}
// 自适应中值滤波器
uchar adaptiveMedianFilter(cv::Mat &img, int row, int col, int kernelSize, int maxSize)
{
std::vector<uchar> pixels;
for (int y = -kernelSize / 2;y <= kernelSize / 2;y++)
{
for (int x = -kernelSize / 2;x <= kernelSize / 2;x++)
{
pixels.push_back(img.at<uchar>(row + y, col + x));
}
}
sort(pixels.begin(), pixels.end());
auto min = pixels[0];
auto max = pixels[kernelSize*kernelSize - 1];
auto med = pixels[kernelSize*kernelSize / 2];
auto zxy = img.at<uchar>(row, col);
if (med > min && med < max)
{
// to B
if (zxy > min && zxy < max)
return zxy;
else
return med;
}
else
{
kernelSize += 2;
if (kernelSize <= maxSize)
return adaptiveMedianFilter(img, row, col, kernelSize, maxSize);// 增大窗口尺寸,继续A过程。
else
return med;
}
}
int main()
{
int minSize = 3;
int maxSize = 7;
cv::Mat img;
img = cv::imread("lena.bmp");
cv::cvtColor(img, img, cv::COLOR_BGR2GRAY);
cv::imshow("src", img);
saltNoise(img, 40000);
pepperNoise(img, 40000);
cv::imshow("noise", img);
cv::Mat temp = img.clone();
// 自适应中值滤波
cv::Mat img1;
// 扩展图像的边界
cv::copyMakeBorder(img, img1, maxSize / 2, maxSize / 2, maxSize / 2, maxSize / 2, cv::BorderTypes::BORDER_REFLECT);
// 图像循环
for (int j = maxSize / 2;j < img1.rows - maxSize / 2;j++)
{
for (int i = maxSize / 2;i < img1.cols - maxSize / 2;i++)
{
img1.at<uchar>(j, i) = adaptiveMedianFilter(img1, j, i, minSize, maxSize);
}
}
cv::imshow("adaptiveMedianFilter", img1);
// 中值滤波
cv::Mat img2;
int kernelSize = 3;
cv::copyMakeBorder(temp, img2, kernelSize / 2, kernelSize / 2, kernelSize / 2, kernelSize / 2, cv::BorderTypes::BORDER_REFLECT);
for (int j = kernelSize / 2;j < img2.rows - kernelSize / 2;j++)
{
for (int i = kernelSize / 2;i < img2.cols - kernelSize / 2;i++)
{
img2.at<uchar>(j, i) = medianFilter(img2, j, i, kernelSize);
}
}
cv::imshow("medianFilter", img2);
cv::waitKey();
cv::destroyAllWindows();
return 0;
}结果截图
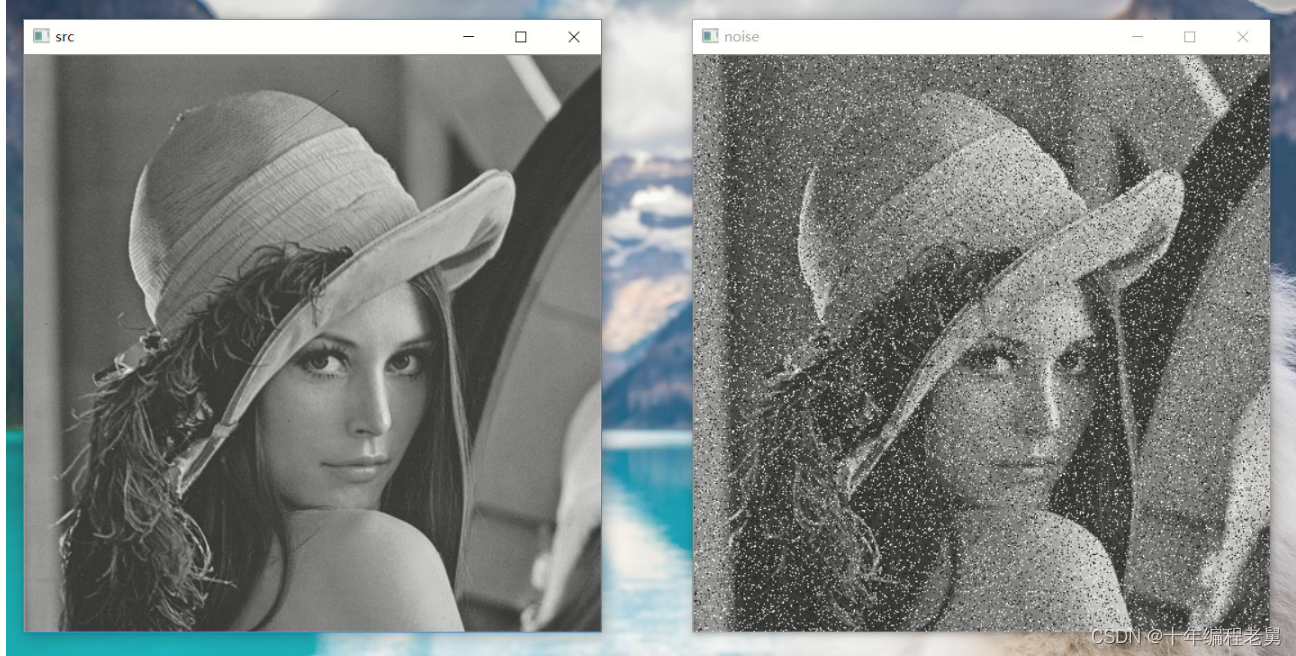
原始图像和添加椒盐噪声后的图像。
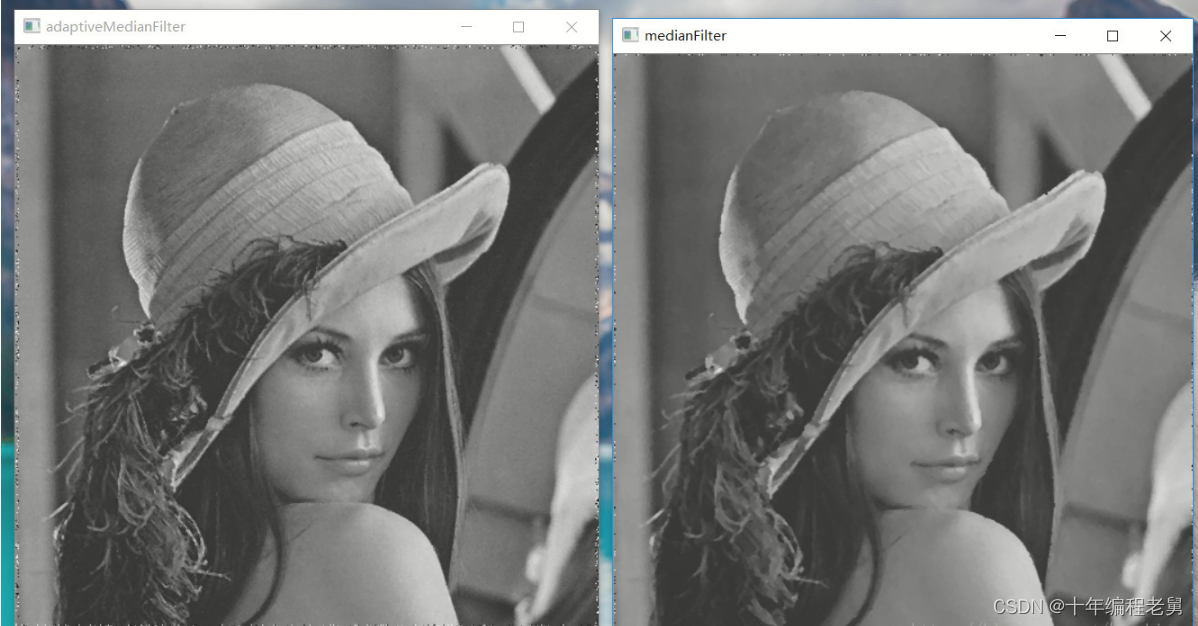
其实截图中看不出很明显的区别,在自己电脑上运行后看结果会清楚点。可以看到使用普通中值滤波的结果相比另一个会模糊一些,且局部仍然会有一小的噪声点。图像边缘多出来的区域不好做中值滤波处理保留了原始图像,所以边缘那一圈仍然有噪声。
原文地址:https://www.cnblogs.com/ybqjymy/p/17514444.html
本文福利,莬费领取Qt开发学习资料包、技术视频,内容包括(Qt实战项目,C++语言基础,C++设计模式,Qt编程入门,QT信号与槽机制,QT界面开发-图像绘制,QT网络,QT数据库编程,QT项目实战,QSS,OpenCV,Quick模块,面试题等等)↓↓↓↓↓↓见下面↓↓文章底部点击莬费领取↓↓