点击下方卡片,关注“CVer”公众号
AI/CV重磅干货,第一时间送达
转载自:机器之心
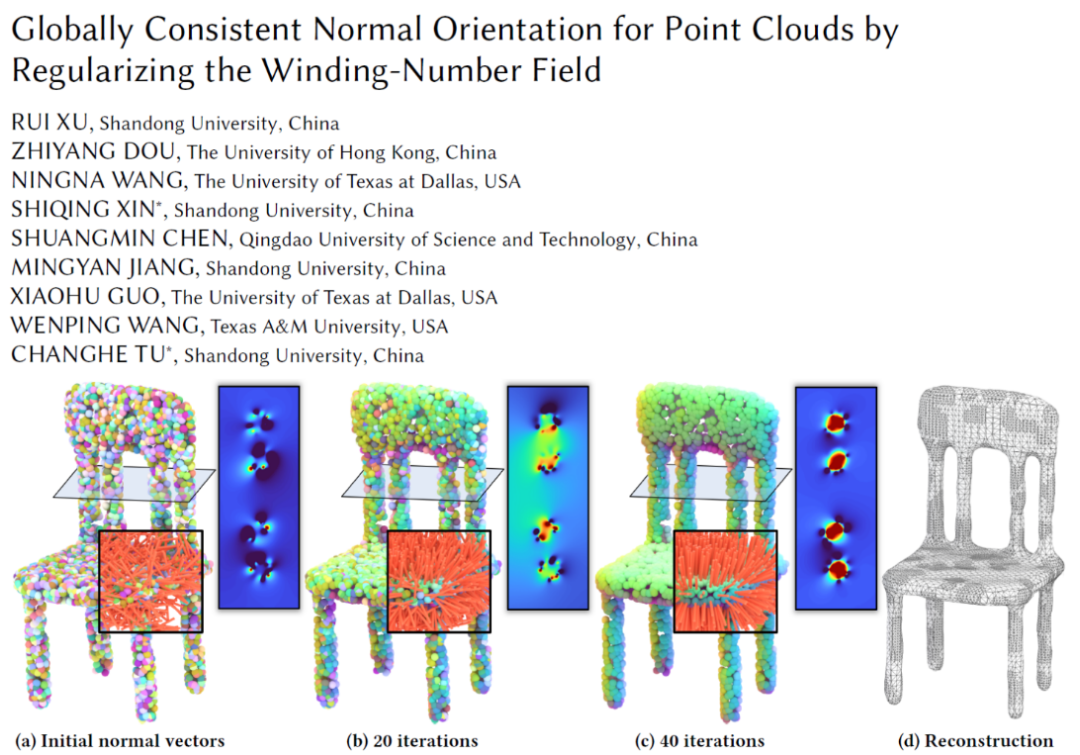
2023 年 7 月 7 日,计算机图形学顶级会议 ACM SIGGRAPH 2023 最佳论文奖评选结果揭晓。其中,山东大学计算机科学与技术学院交叉研究中心(IRC)的科研团队发表的学术论文 “Globally Consistent Normal Orientation for Point Clouds by Regularizing the Winding-Number Field” 被评为五篇最佳论文之一。这是自 SIGGRAPH (NA) 设立最佳论文奖以来,国内科研团队首次以第一单位荣获该奖项。
该论文的第一作者是山东大学硕士二年级学生徐瑞,指导教师是山东大学交叉研究中心的屠长河教授和辛士庆副教授。合作者还包括香港大学的博士生窦志扬、美国德州大学达拉斯分校的博士生王宁娜、青岛科技大学的陈双敏副教授、山东大学的江铭炎教授、美国德州大学达拉斯分校的郭小虎教授以及美国德州农工大学的王文平教授。
论文项目主页:https://xrvitd.github.io/Projects/GCNO/index.html
代码:https://github.com/Xrvitd/GCNO
介绍视频
该论文的研究主题是点云法线定向问题。考虑到传统方法未能充分利用形状全局先验(流形、水密、可定向),作者利用全局一致法向与规范卷绕数场(Winding Number Field)之间的强耦合关系,提出了一个光滑的优化函数,从而获取能够反映潜在形状的定向信息。
点云数据可以认为是一组落在某个可定向水密流形曲面上的采样点集。估算法向是三维重建任务的重要一步,并为很多几何处理任务提供必要的信息支持。具体地说,法向的估算又可细分为定向一致性问题和法向精确性问题。然而,原始点云可能存在各种瑕疵(噪声、稀疏、不均匀、缺失等),潜在形状可能非常复杂(薄板、细管、尖边尖角、高亏格),这进一步加剧了法向估算的难度。本论文观察到定向一致性问题和法向精确性问题不是两个独立的问题,因此将它们一并考虑,针对无法向点云直接恢复具有精确性和一致性的法向信息。
传统定向算法多是基于传播的范式,由近及远,层层向外传播。然而,这种过程式的算法存在 “一步错,步步错” 的先天缺陷。归根到底,如何充分利用形状全局先验,以克服点云数据存在的二义性,是解决该困难问题的关键。作者观察到正确的定向能够产生规范的卷绕数场(非 0 即 1),因而以 “编码了全局形状信息的卷绕数场” 为工具,提出了基于规范化卷绕数场的新思路。如图 1 所示,当点云的法线完全随机时,点云的卷绕数场几乎处处为零;而当点云的法线完全正确时,点云的卷绕数场非 0 即 1,且模型外部为 0,内部为 1。
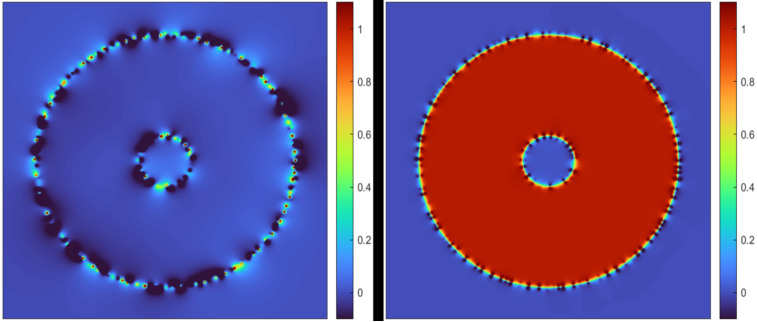
图 1. 左侧为随机法向产生的卷绕数场,右侧为正确法向产生的卷绕数场
如图 2 所示,为了迫使卷绕数 “非 0 即 1”,作者使用物理学中的双势阱函数鼓励卷绕数向 0 或者 1 演化。同时,为了阻止全零卷绕数,本文在双势阱函数中添加了一个修正项,进一步提高取值为 1 的倾向性。其对应的函数是:
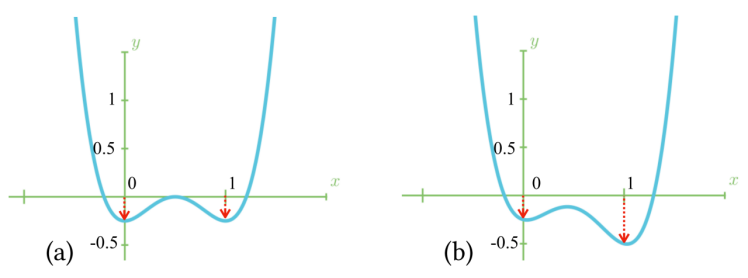
图 2. 普通双势阱函数及修正后的函数图像
作者观察到,尽管定向一致性问题和法向精确性问题分别反映了全局和局部几何结构,但它们之间存在关联。已有研究表明,空间 Voronoi 图能够描述局部几何结构,在法线准确估计方面具备优势。因此,本文首先求解三维空间中的 Voronoi 图,然后以 Voronoi 顶点作为观测点,定义法向的全局一致性和局部精确性。假设共有 M 个 Voronoi 顶点,那么卷绕数场的规范性可被描述为:

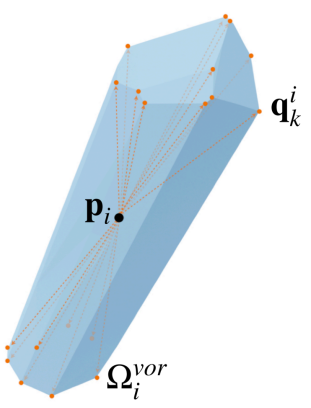

图 3. 每个点的 Voronoi cell,上图为 Voronoi 顶点,下图为极点 (最远点)
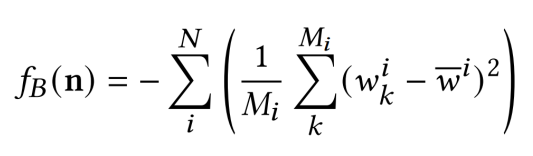
在采样比较稠密的情况下,每个采样点的 Voronoi cell 部分在内、部分在外。外部 Voronoi 顶点对应的卷绕数为 0,内部 Voronoi 顶点对应的卷绕数为 1。为了抑制 “全 0” 或者 “全 1” 的情况,确保潜在曲面将三维空间分为内外两部分,引入平衡项:
如图 3 所示,对于 Voronoi cell 来说,有一个离站点最远的内部顶点和一个离站点最远的外部顶点,它们均称作极点。已有研究表明,极点为法线朝向的精确性提供了几何依据。因此,论文还引入一个对齐项,用于刻画法线的走向是否与极点所处的方位保持一致:
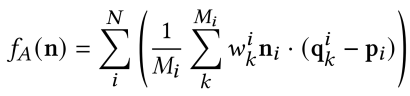
图 4. 迭代优化过程
最终,一致性需求和精确性需求被描述为一个由三个能量项构成的目标函数,其最小值反映了一致性和精确性:

其中 n 为点云的待求法向。作者严格地证明了该目标函数存在非平凡的最优解。优化过程如图 4 所示。即使对于薄板、细管等具有挑战性的模型,无论是随机法线初始化还是球面法线初始化,均能得到整齐的法线信息。

图 5. 法向一致性结果对比 (红色点为预测错误)
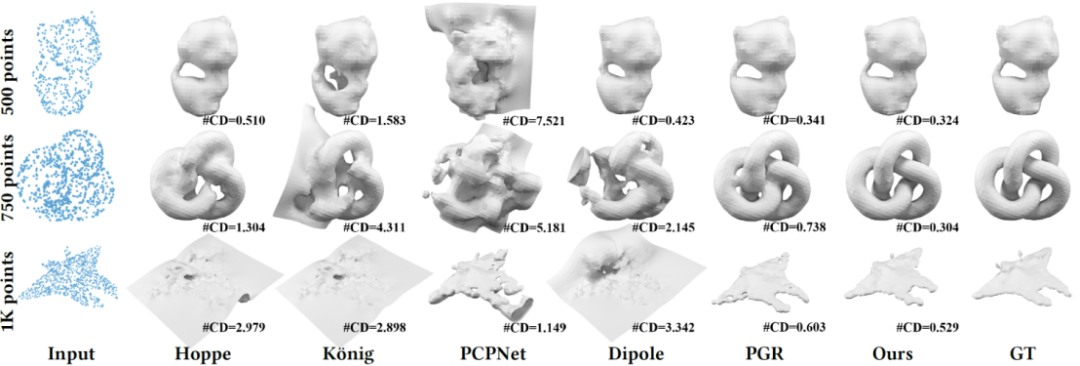
图 6. 稀疏点云泊松重建结果
本文对现有的法线估计算法进行了比较(图 5),并使用泊松重建(Poisson Reconstruction)进行了黑盒测试(图 6),充分表明了该方法的有效性。即使在稀疏、噪声、复杂(图 7)甚至只有线框(图 8)的模型上,该算法仍能获得高质量的法线信息和重建结果。
图 7. 复杂模型重建结果
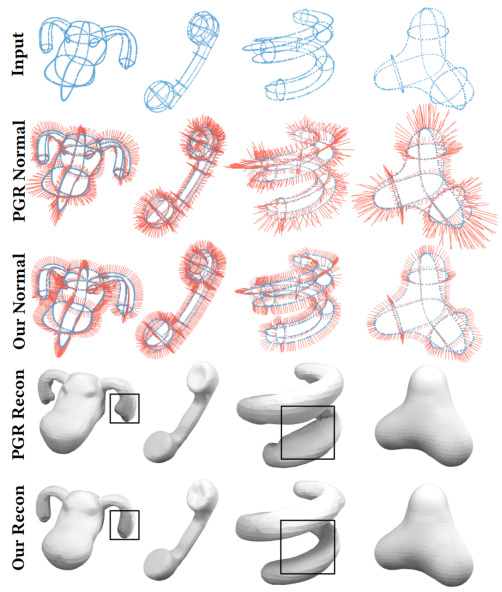
图 8. 线框点云法向估计及重建结果
总结起来,本文提出了一种通过规范化卷绕场获得全局一致法线的方法。该方法以卷绕数场非 0 即 1 为基本要求,同时考虑了精确性(与 Voronoi 极点对齐)和内外可分性(0-1 平衡),将法线定向问题转化为一个最小化问题。本文对具有各种缺陷和挑战的点云进行了广泛实验,例如噪声、稀疏、缝隙、薄板和高度复杂的几何 / 拓扑结构,实验结果表明了该方法的优越性。该技术有望应用于逆向工程、智能制造、三维影像、无人驾驶、人机交互、数字城市、电影娱乐等领域。值得一提的是,论文相关视频还入选了 SIGGRAPH 2023 技术论文宣传片,突显了其重要性和创新性。

山东大学交叉研究中心(Interdisciplinary Research Center, IRC)成立于 2013 年 9 月,重点关注视觉感知与交互相关领域新兴技术的发展与应用。自成立以来,中心面向国家在智能制造、虚拟现实与增强现实、大数据可视化、智能机器人等方面的重大需求,建设计算机图形学、计算机视觉、可视化与可视分析三个方向。
ICCV / CVPR 2023论文和代码下载
后台回复:CVPR2023,即可下载CVPR 2023论文和代码开源的论文合集
后台回复:ICCV2023,即可下载ICCV 2023论文和代码开源的论文合集目标检测和Transformer交流群成立
扫描下方二维码,或者添加微信:CVer333,即可添加CVer小助手微信,便可申请加入CVer-目标检测或者Transformer 微信交流群。另外其他垂直方向已涵盖:目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪、去雾、去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索、论文投稿&交流、PyTorch、TensorFlow和Transformer等。
一定要备注:研究方向+地点+学校/公司+昵称(如目标检测或者Transformer+上海+上交+卡卡),根据格式备注,可更快被通过且邀请进群
▲扫码或加微信号: CVer333,进交流群
CVer计算机视觉(知识星球)来了!想要了解最新最快最好的CV/DL/AI论文速递、优质实战项目、AI行业前沿、从入门到精通学习教程等资料,欢迎扫描下方二维码,加入CVer计算机视觉,已汇集数千人!
▲扫码进星球
▲点击上方卡片,关注CVer公众号整理不易,请点赞和在看![]()