在RTT下为什么推荐使用RTT统一标准的SPI接口
在《【龙芯1c库】封装硬件SPI接口和使用示例》http://blog.csdn.net/caogos/article/details/78353988中提到了,龙芯1c的每路SPI有4个片选,在多任务的实时系统中需要注意互斥的问题。龙芯1C库中的SPI接口仅仅是把龙芯1C的SPI硬件相关特别封装成了一个一个的软件接口。而RT-Thread中统一的标准SPI接口刚好解决了互斥的问题。即只要把龙芯1c库中的SPI接口稍加修改,与RTT中统一的标准SPI接口适配好后,就可以实现使用RTT标准SPI接口编程,而不需考虑互斥的问题。下面以函数 rt_spi_transfer()为例来看看RTT是如何实现互斥的。
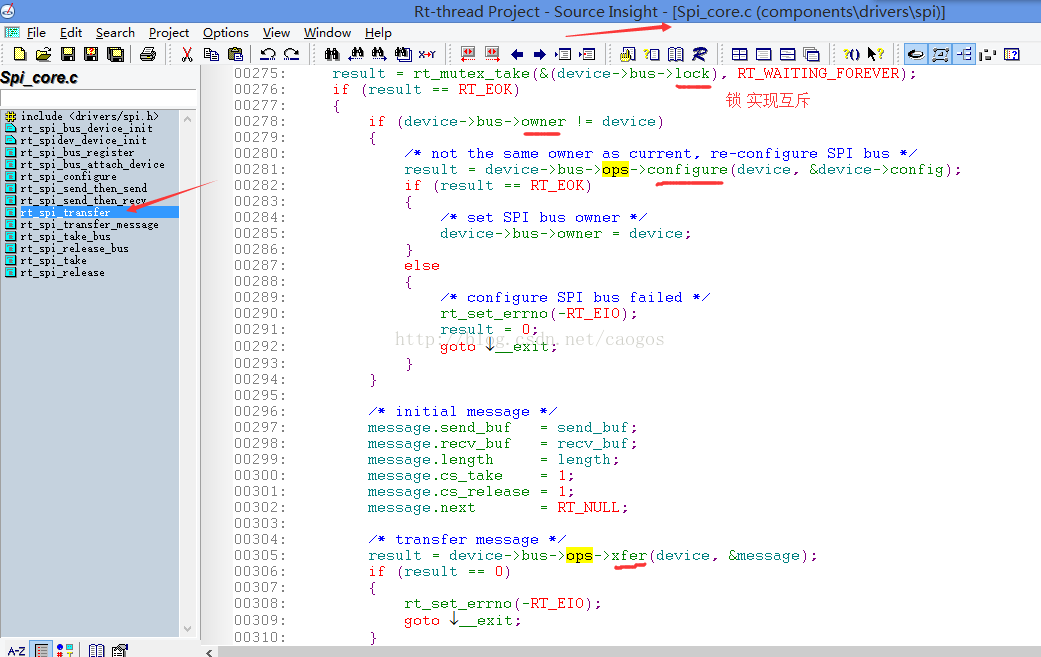
程序的大概意思是,在SPI收发之前首先获取锁,以此实现互斥。然后判断上一次SPI通信的从设备是否与当前从设备为同一个,对应代码为if (device->bus->owner != device),如果不是,需要调用evice->bus->ops->configure()函数重新配置SPI的时钟频率,极性和相位等,最后才是调用device->bus->ops->xfer()实现具体的SPI收发。
其实,在刚开始接触RTT和龙芯1C时,不用关注这么多细节,我已经把RTT统一的标准的SPI接口移植到龙芯1C上了,只需要知道怎么使用这些接口即可。如果之前在STM32上用过RTT的SPI,那么我告诉你,在龙芯1C上也是一样的。因为是RTT统一的SPI接口和具体的芯片“无关”。下面来看看RTT提供了几个统一的SPI接口,都有什么功能。
RTT统一的标准的SPI接口简介
注册SPI总线
函数原型
/* * 初始化并注册龙芯1c的spi总线 * @SPI SPI总线,比如LS1C_SPI_0, LS1C_SPI_1 * @spi_bus_name 总线名字 * @ret */ rt_err_t ls1c_spi_bus_register(rt_uint8_t SPI, const char *spi_bus_name)
函数ls1c_spi_bus_register()调用RTT的统一标准接口rt_spi_bus_register(),实现SPI总线的注册
使用示例
// SPI模块编号
#define LS1C_SPI_0 (0)
#define LS1C_SPI_1 (1)
#define LS1C_SPI0_BUS_NAME ("spi0")
ls1c_spi_bus_register(LS1C_SPI_1, LS1C_SPI0_BUS_NAME);
挂接SPI从设备到SPI总线
函数原型
rt_err_t rt_spi_bus_attach_device(struct rt_spi_device *device,
const char *name,
const char *bus_name,
void *user_data)
这个直接就是RTT的统一标准接口rt_spi_bus_attach_device()。
使用示例
#define LS1C_SPI0_BUS_NAME ("spi0")
#define TM7705_SPI_DEVICE_NAME ("tm7705")
struct rt_spi_device tm7705_spi_device;
static struct ls1c_spi_cs spi_cs;
// 把从设备(tm7705)挂在SPI总线上
spi_cs.cs = LS1C_SPI_CS_1;
result = rt_spi_bus_attach_device(&tm7705_spi_device,
TM7705_SPI_DEVICE_NAME,
LS1C_SPI0_BUS_NAME,
&spi_cs);
if (RT_EOK != result)
{
rt_kprintf("[%s] attach spi device tm7705 fail.\n", __FUNCTION__);
return ;
}
注意,这里把片选信息以入参的形式传递给RTT。变量tm7705_spi_device和spi_cs常定义为static类型,我这里把tm7705_spi_device定义为全局变量了,也是可以的。目的是不能把这两个变量作为函数的临时变量,所占的空间不能被自动释放。
片选信息的结构体定义在头文件“bsp\ls1cdev\drivers\drv_spi.h”里,如下
struct ls1c_spi_cs
{
unsigned char cs; // LS1C_SPI_CS_0, LS1C_SPI_CS_1, LS1C_SPI_CS_2 or LS1C_SPI_CS_3
};
片选的几个可选值在头文件“bsp\ls1cdev\libraries\ls1c_spi.h”中已定义好了,如下
// 片选 #define LS1C_SPI_CS_0 (0) #define LS1C_SPI_CS_1 (1) #define LS1C_SPI_CS_2 (2) #define LS1C_SPI_CS_3 (3)
注意,这几个片选宏的值不能随意更改,函数ls1c_spi_set_cs()使用这几个值来设置龙芯1C的SPI片选控制寄存器的。实际上也没必要修改这几个宏的值,直接调用即可。
配置SPI
函数原型
t_err_t rt_spi_configure(struct rt_spi_device *device,
struct rt_spi_configuration *cfg)
配置信息的结构体为
/**
* SPI configuration structure
*/
struct rt_spi_configuration
{
rt_uint8_t mode;
rt_uint8_t data_width;
rt_uint16_t reserved;
rt_uint32_t max_hz;
};
注意,龙芯1C只关注其中的mode和max_hz就可以了。data_width和reserved可以忽略。
使用示例
struct rt_spi_device tm7705_spi_device; struct rt_spi_configuration cfg; // 配置SPI cfg.mode = RT_SPI_MODE_3; cfg.max_hz = 100*1000; rt_spi_configure(&tm7705_spi_device, &cfg);
几个常用的SPI收发函数
rt_spi_send()
函数原型
rt_inline rt_size_t rt_spi_send(struct rt_spi_device *device,
const void *send_buf,
rt_size_t length)
使用示例
struct rt_spi_device tm7705_spi_device;
const unsigned char send_buf[4] = {0xFF};
rt_spi_send(&tm7705_spi_device, send_buf, 4);
rt_spi_recv()
函数原型
rt_inline rt_size_t rt_spi_recv(struct rt_spi_device *device,
void *recv_buf,
rt_size_t length)
使用示例
struct rt_spi_device tm7705_spi_device;
Unsigned char recv_buf[4] = {0};
rt_spi_recv(&tm7705_spi_device, recv_buf, 4);
rt_spi_send_then_recv()
函数原型
rt_err_t rt_spi_send_then_recv(struct rt_spi_device *device,
const void *send_buf,
rt_size_t send_length,
void *recv_buf,
rt_size_t recv_length)
使用示例
struct rt_spi_device tm7705_spi_device;
unsigned char send_buf[1] = {0};
unsigned char recv_buf[2] = {0};
rt_spi_send_then_recv(&tm7705_spi_device, send_buf, 1, recv_buf, 2);
RTT还提供了rt_spi_send_then_send()、rt_spi_transfer()等,具体查看源码,应该很容易看懂的。
设置引脚复用(不是必须的)
可能需要设置引脚复用,引脚复用接口使用头文件“bsp\ls1cdev\libraries\ls1c_pin.h”中的pin_set_remap()即可。例如
// spi复用 #define LS1C_SPI_1_CS_0_GPIO (49) // gpio49/spi1_cs0/CAMHSYNC #define LS1C_SPI_1_CS_1_GPIO (50) // gpio50/spi1_cs1/CAMDATA0 #define LS1C_SPI_1_CS_2_GPIO (51) // gpio51/spi1_cs2/CAMDATA1 #define LS1C_SPI_1_CS_3_GPIO (52) // gpio52/spi1_cs3/CAMDATA2 #define LS1C_SPI_1_MISO_GPIO (47) // gpio47/spi1_miso/CAMCLKOUT #define LS1C_SPI_1_MOSI_GPIO (48) // gpio48/spi1_mosi/CAMVSYNC #define LS1C_SPI_1_CLK_GPIO (46) // gpio46/spi1_clk/CAMPCLKIN // SPI1 CS1 pin_set_remap(LS1C_SPI_1_MISO_GPIO, PIN_REMAP_THIRD); pin_set_remap(LS1C_SPI_1_MOSI_GPIO, PIN_REMAP_THIRD); pin_set_remap(LS1C_SPI_1_CLK_GPIO, PIN_REMAP_THIRD); pin_set_remap(LS1C_SPI_1_CS_1_GPIO, PIN_REMAP_THIRD); // cs1
综合应用示例——在龙芯1C上接双路16位AD芯片TM7705
本示例为3d打印机中使用tm7705+NTC热敏电阻实现温度测量的那部分代码,有兴趣的可以移步到
《【龙印】在龙芯1c上用TM7705+NTC热敏电阻实现温度测量》http://blog.csdn.net/caogos/article/details/53126628
《【龙印】龙芯1c上双路16位AD芯片TM7705的linux驱动》http://blog.csdn.net/caogos/article/details/53034196
这里直接贴源码了。
application.c
bsp\ls1cdev\applications\application.c/*
* File : application.c
* This file is part of RT-Thread RTOS
* COPYRIGHT (C) 2006-2012, RT-Thread Develop Team
*
* The license and distribution terms for this file may be
* found in the file LICENSE in this distribution or at
* http://www.rt-thread.org/license/LICENSE
*
* Change Logs:
* Date Author Notes
* 2010-06-25 Bernard first version
* 2011-08-08 lgnq modified for Loongson LS1B
* 2015-07-06 chinesebear modified for Loongson LS1C
*/
#include <rtthread.h>
#include "net/synopGMAC.h"
#include <lwip/api.h>
#include "test_spi.h"
// 测试用的线程
#define THREAD_TEST_PRIORITY (25)
#define THREAD_TEST_STACK_SIZE (4*1024) // 4k
#define THREAD_TEST_TIMESLICE (10)
struct rt_thread thread_test;
ALIGN(8)
rt_uint8_t thread_test_stack[THREAD_TEST_STACK_SIZE];
// 测试用的线程的入口
void thread_test_entry(void *parameter)
{
float temp_f;
// tm7705初始化
tm7705_init();
rt_kprintf("[%s] tm7705 init ok!\r\n", __FUNCTION__);
while (1)
{
temp_f = tm7705_get_temperature();
rt_thread_delay(2*1000);
}
}
void rt_init_thread_entry(void *parameter)
{
/* initialization RT-Thread Components */
rt_components_init();
// 网口EMAC初始化
rt_hw_eth_init();
}
int rt_application_init(void)
{
rt_thread_t tid;
rt_err_t result;
/* create initialization thread */
tid = rt_thread_create("init",
rt_init_thread_entry, RT_NULL,
4096, RT_THREAD_PRIORITY_MAX/3, 20);
if (tid != RT_NULL)
rt_thread_startup(tid);
// 初始化测试用的线程
result = rt_thread_init(&thread_test,
"thread_test",
thread_test_entry,
RT_NULL,
&thread_test_stack[0],
sizeof(thread_test_stack),
THREAD_TEST_PRIORITY,
THREAD_TEST_TIMESLICE);
if (RT_EOK == result)
{
rt_thread_startup(&thread_test);
}
else
{
return -1;
}
return 0;
}
test_spi.c
bsp\ls1cdev\applications\test_spi.c
// 测试硬件spi源文件
#include <rtthread.h>
#include <drivers/spi.h>
#include "../libraries/ls1c_public.h"
#include "../libraries/ls1c_pin.h"
#include "../libraries/ls1c_gpio.h"
#include "../libraries/ls1c_delay.h"
#include "../drivers/drv_spi.h"
// spi复用
#define LS1C_SPI_1_CS_0_GPIO (49) // gpio49/spi1_cs0/CAMHSYNC
#define LS1C_SPI_1_CS_1_GPIO (50) // gpio50/spi1_cs1/CAMDATA0
#define LS1C_SPI_1_CS_2_GPIO (51) // gpio51/spi1_cs2/CAMDATA1
#define LS1C_SPI_1_CS_3_GPIO (52) // gpio52/spi1_cs3/CAMDATA2
#define LS1C_SPI_1_MISO_GPIO (47) // gpio47/spi1_miso/CAMCLKOUT
#define LS1C_SPI_1_MOSI_GPIO (48) // gpio48/spi1_mosi/CAMVSYNC
#define LS1C_SPI_1_CLK_GPIO (46) // gpio46/spi1_clk/CAMPCLKIN
// 通信寄存器bit定义
enum
{
// 寄存器选择 RS2 RS1 RS0
TM7705_REG_COMM = (0 << 4), // 通信寄存器
TM7705_REG_SETUP = (1 << 4), // 设置寄存器
TM7705_REG_CLOCK = (2 << 4), // 时钟寄存器
TM7705_REG_DATA = (3 << 4), // 数据寄存器
TM7705_REG_TEST = (4 << 4), // 测试寄存器
TM7705_REG_OFFSET = (6 << 4), // 偏移寄存器
TM7705_REG_GAIN = (7 << 4), // 增益寄存器
// 读写操作
TM7705_WRITE = (0 << 3), // 写操作
TM7705_READ = (1 << 3), // 读操作
// 通道
TM7705_CH_1 = 0, // AIN1+ AIN1-
TM7705_CH_2 = 1, // AIN2+ AIN2-
TM7705_CH_3 = 2, // AIN1- AIN1-
TM7705_CH_4 = 3 // AIN1- AIN2-
};
/* 设置寄存器bit定义 */
enum
{
TM7705_MD_NORMAL = (0 << 6), /* 正常模式 */
TM7705_MD_CAL_SELF = (1 << 6), /* 自校准模式 */
TM7705_MD_CAL_ZERO = (2 << 6), /* 校准0刻度模式 */
TM7705_MD_CAL_FULL = (3 << 6), /* 校准满刻度模式 */
TM7705_GAIN_1 = (0 << 3), /* 增益 */
TM7705_GAIN_2 = (1 << 3), /* 增益 */
TM7705_GAIN_4 = (2 << 3), /* 增益 */
TM7705_GAIN_8 = (3 << 3), /* 增益 */
TM7705_GAIN_16 = (4 << 3), /* 增益 */
TM7705_GAIN_32 = (5 << 3), /* 增益 */
TM7705_GAIN_64 = (6 << 3), /* 增益 */
TM7705_GAIN_128 = (7 << 3), /* 增益 */
/* 无论双极性还是单极性都不改变任何输入信号的状态,它只改变输出数据的代码和转换函数上的校准点 */
TM7705_BIPOLAR = (0 << 2), /* 双极性输入 */
TM7705_UNIPOLAR = (1 << 2), /* 单极性输入 */
TM7705_BUF_NO = (0 << 1), /* 输入无缓冲(内部缓冲器不启用) */
TM7705_BUF_EN = (1 << 1), /* 输入有缓冲 (启用内部缓冲器) */
TM7705_FSYNC_0 = 0, // 模拟调制器和滤波器正常处理数据
TM7705_FSYNC_1 = 1 // 模拟调制器和滤波器不启用
};
/* 时钟寄存器bit定义 */
enum
{
TM7705_CLKDIS_0 = (0 << 4), /* 时钟输出使能 (当外接晶振时,必须使能才能振荡) */
TM7705_CLKDIS_1 = (1 << 4), /* 时钟禁止 (当外部提供时钟时,设置该位可以禁止MCK_OUT引脚输出时钟以省电 */
TM7705_CLKDIV_0 = (0 << 3), // 不分频
TM7705_CLKDIV_1 = (1 << 3), // 2分频,外部晶振为4.9152Mhz时,应2分频
TM7705_CLK_0 = (0 << 2), // 主时钟=1Mhz并且CLKDIV=0,主时钟=2Mhz并且CLKDIV=1
TM7705_CLK_1 = (1 << 2), // 主时钟=2.4576Mhz并且CLKDIV=0, 主时钟=4.9152Mhz并且CLKDIV=1
// 注意输出更新率与clk位有关
// 当TM7705_CLK_0时,输出更新率只能为20,25,100,200
TM7705_UPDATE_20 = (0),
TM7705_UPDATE_25 = (1),
TM7705_UPDATE_100 = (2),
TM7705_UPDATE_200 = (3),
// 当TM7705_CLK_1时,输出更新率只能为50,60,250,500
TM7705_UPDATE_50 = (0),
TM7705_UPDATE_60 = (1),
TM7705_UPDATE_250 = (2),
TM7705_UPDATE_500 = (3)
};
#define TM7705_CHANNEL_NUM (2) // tm7705通道个数
#define TM7705_DRDY_PIN (87) // GPIO87/I2S_DI tm7705的引脚DRDY
#define TM7705_RESET_PIN (89) // GPIO89/I2S_LRCK tm7705的引脚RESET
#define TM7705_AD_MAX ((0x1 << 10) - 1) // ad的最大值,只用了十位的精度
#define TM7705_IS_VALID_AD(ad) ((TM7705_AD_MAX >= (ad)) && (0 <= (ad)))
// 返回值
#define TM7705_RET_TIMEOUT (-1) // 超时
#define TM7705_RET_OK (0) // 正常返回
#define TM7705_RET_OTHER_ERR (1) // 其它错误
#define LS1C_SPI0_BUS_NAME ("spi0")
#define TM7705_SPI_DEVICE_NAME ("tm7705")
// 以下根据ntc热敏电阻参数用脚本生成的adc值与温度一一对应的表格
// 左边为adc值,右边为温度(单位:摄氏度)
// 详细请参考源码目录中的脚本"createTemperatureLookup.py"
// python createTemperatureLookup.py
// Thermistor lookup table for RepRap Temperature Sensor Boards (http://make.rrrf.org/ts)
// Made with createTemperatureLookup.py (http://svn.reprap.org/trunk/reprap/firmware/Arduino/utilities/createTemperatureLookup.py)
// ./createTemperatureLookup.py --r0=100000 --t0=25 --r1=0 --r2=4700 --beta=3950 --max-adc=1023
// r0: 100000
// t0: 25
// r1: 0
// r2: 4700
// beta: 3950
// max adc: 1023
#define TM7705_NTC_NUMTEMPS 40
const short tm7705_ntc_temptable[TM7705_NTC_NUMTEMPS][2] = {
{1, 938},
{27, 326},
{53, 269},
{79, 239},
{105, 219},
{131, 204},
{157, 192},
{183, 182},
{209, 174},
{235, 166},
{261, 160},
{287, 153},
{313, 148},
{339, 143},
{365, 138},
{391, 133},
{417, 129},
{443, 125},
{469, 120},
{495, 116},
{521, 113},
{547, 109},
{573, 105},
{599, 101},
{625, 98},
{651, 94},
{677, 90},
{703, 86},
{729, 82},
{755, 78},
{781, 74},
{807, 70},
{833, 65},
{859, 60},
{885, 54},
{911, 48},
{937, 41},
{963, 31},
{989, 18},
{1015, -8}
};
struct rt_spi_device tm7705_spi_device;
/*
* 通过RESET引脚复位tm7705
*/
void tm7705_reset(void)
{
gpio_set(TM7705_RESET_PIN, gpio_level_high);
delay_ms(1);
gpio_set(TM7705_RESET_PIN, gpio_level_low);
delay_ms(2);
gpio_set(TM7705_RESET_PIN, gpio_level_high);
delay_ms(1);
return ;
}
/*
* 同步SPI接口时序
*/
void tm7705_sync_spi(void)
{
const unsigned char send_buf[4] = {0xFF};
// 在至少32个串行时钟内向TM7705的DIN脚写入逻辑'1'
rt_spi_send(&tm7705_spi_device, send_buf, 4);
return ;
}
/*
* 等待内部操作完成, 时间较长,约180ms
* @ret 成功 或者 超时
*/
int tm7705_wait_DRDY(void)
{
int i = 0;
int time_cnt = 500;
for (i=0; i<time_cnt; i++)
{
if (gpio_level_low == gpio_get(TM7705_DRDY_PIN))
{
break;
}
delay_ms(1);
}
if (i >= time_cnt)
{
return TM7705_RET_TIMEOUT;
}
return TM7705_RET_OK;
}
/*
* 自校准
* @channel 通道
*/
void tm7705_calib_self(unsigned char channel)
{
unsigned char send_buf[2] = {0};
send_buf[0] = TM7705_REG_SETUP | TM7705_WRITE | channel;
send_buf[1] = TM7705_MD_CAL_SELF | TM7705_GAIN_1 | TM7705_UNIPOLAR | TM7705_BUF_EN | TM7705_FSYNC_0;
rt_spi_send(&tm7705_spi_device, send_buf, 2);
// 等待内部操作完成, 时间较长,约180ms
tm7705_wait_DRDY();
delay_ms(50);
return ;
}
/*
* 配置tm7705的指定通道
* @channel 通道
*/
void tm7705_config_channel(unsigned char channel)
{
unsigned char send_buf[2] = {0};
send_buf[0] = TM7705_REG_CLOCK | TM7705_WRITE | channel;
send_buf[1] = TM7705_CLKDIS_0 | TM7705_CLKDIV_1 | TM7705_CLK_1 | TM7705_UPDATE_50;
rt_spi_send(&tm7705_spi_device, send_buf, 2);
// 自校准
tm7705_calib_self(channel);
return ;
}
/*
* 复位tm7705并重新配置
*/
void tm7705_reset_and_reconfig(void)
{
// 通过RESET引脚复位tm7705
tm7705_reset();
// 同步SPI接口时序
delay_ms(5);
tm7705_sync_spi();
delay_ms(5);
// 配置tm7705的指定通道
tm7705_config_channel(TM7705_CH_1);
return ;
}
/*
* tm7705初始化
*/
void tm7705_init(void)
{
static struct ls1c_spi_cs spi_cs;
struct rt_spi_configuration cfg;
rt_err_t result;
// 初始化DRDY和RESET引脚
gpio_init(TM7705_DRDY_PIN, gpio_mode_input);
gpio_init(TM7705_RESET_PIN, gpio_mode_output);
gpio_set(TM7705_RESET_PIN, gpio_level_high);
// 注册SPI总线
ls1c_spi_bus_register(LS1C_SPI_1, LS1C_SPI0_BUS_NAME);
// ls1c_spi_bus_register(LS1C_SPI_0, LS1C_SPI0_BUS_NAME);
// 把从设备(tm7705)挂在SPI总线上
spi_cs.cs = LS1C_SPI_CS_1;
result = rt_spi_bus_attach_device(&tm7705_spi_device,
TM7705_SPI_DEVICE_NAME,
LS1C_SPI0_BUS_NAME,
&spi_cs);
if (RT_EOK != result)
{
rt_kprintf("[%s] attach spi device tm7705 fail.\n", __FUNCTION__);
return ;
}
// 配置SPI
cfg.mode = RT_SPI_MODE_3;
cfg.max_hz = 100*1000;
rt_spi_configure(&tm7705_spi_device, &cfg);
// 复用
// 下面我选择了几路spi进行测试,都通过了的,有需要的可以把注释取消,进行测试
/*
// SPI1 CS0
pin_set_remap(LS1C_SPI_1_MISO_GPIO, PIN_REMAP_THIRD);
pin_set_remap(LS1C_SPI_1_MOSI_GPIO, PIN_REMAP_THIRD);
pin_set_remap(LS1C_SPI_1_CLK_GPIO, PIN_REMAP_THIRD);
pin_set_remap(LS1C_SPI_1_CS_0_GPIO, PIN_REMAP_THIRD); // cs0
*/
// SPI1 CS1
pin_set_remap(LS1C_SPI_1_MISO_GPIO, PIN_REMAP_THIRD);
pin_set_remap(LS1C_SPI_1_MOSI_GPIO, PIN_REMAP_THIRD);
pin_set_remap(LS1C_SPI_1_CLK_GPIO, PIN_REMAP_THIRD);
pin_set_remap(LS1C_SPI_1_CS_1_GPIO, PIN_REMAP_THIRD); // cs1
// 复位tm7705并重新配置
tm7705_reset_and_reconfig();
return ;
}
/*
* 读取指定通道的ad值
* @channel 通道
* @adc_p 读取的AD值
* @ret 成功 或 失败
*/
int tm7705_read_channel(int channel, unsigned short *adc_p)
{
int ret = TM7705_RET_TIMEOUT;
unsigned char send_buf[1] = {0};
unsigned char recv_buf[2] = {0};
unsigned short ad = 0;
// 等待转换完成
ret = tm7705_wait_DRDY();
if (TM7705_RET_OK != ret)
{
rt_kprintf("[%s] tm7705 timeout!\r\n", __FUNCTION__);
return ret;
}
// 读
send_buf[0] = TM7705_REG_DATA | TM7705_READ | channel;
rt_spi_send_then_recv(&tm7705_spi_device, send_buf, 1, recv_buf, 2);
ad = (recv_buf[0] << 8) + recv_buf[1];
if (0xfff == ad)
{
rt_kprintf("[%s] ad=0xfff\r\n", __FUNCTION__);
return TM7705_RET_OTHER_ERR;
}
*adc_p = ad;
return TM7705_RET_OK;
}
/*
* 获取tm7705输出的AD值
* @channel 通道
* @adc_p 读取的AD值
* @ret 成功 或者 失败
*/
int tm7705_get_ad(int channel, unsigned short *adc_p)
{
int i = 0;
int ret = TM7705_RET_TIMEOUT;
unsigned short ad = 0;
// 连续读2次
// 第一次读取的值为上一次采集的结果,第二次读取的才是当前的结果 *
for (i=0; i<2; i++)
{
ret = tm7705_read_channel(channel, &ad);
if (TM7705_RET_OK != ret)
{
// 失败,则重启tm7705并重新配置
tm7705_reset_and_reconfig();
rt_kprintf("[%s] tm7705 reset and reconfig!\r\n", __FUNCTION__);
return ret;
}
// ls1c速度相对tm7705太快,延时一下避免在一次读完后DRDY还未及时改变状态
delay_ms(1);
}
// spi_print_all_regs_info(&tm7705_spi_info);
rt_kprintf("[%s] ad=0x%x\r\n", __FUNCTION__, ad);
ad = ad >> 6; // 只需要10位的精度
*adc_p = ad;
return TM7705_RET_OK;
}
/*
* 根据ad值计算温度值
* @ad 从tm7705读取的AD值
* @ret 温度值
*
* ntc热敏电阻的阻值温度曲线被分为n段,每段可以近似为直线
* 所以温度值的计算就转变为查表再计算
*/
float tm7705_calc_temp_from_ad(unsigned short ad)
{
float temp_f;
int i = 0;
// 判断ad值是否在量程范围内
if (!(TM7705_IS_VALID_AD(ad)))
{
return 0;
}
// 判断是否在表格所表示的范围内
if (ad < tm7705_ntc_temptable[0][0]) // 小于表格的最小adc
{
return tm7705_ntc_temptable[0][1]; // 取最小值
}
if (ad > tm7705_ntc_temptable[TM7705_NTC_NUMTEMPS-1][0]) // 大于表格的最大adc
{
return tm7705_ntc_temptable[TM7705_NTC_NUMTEMPS-1][1]; // 取最大值
}
// 查表
for (i=1; i<TM7705_NTC_NUMTEMPS; i++)
{
if (ad < tm7705_ntc_temptable[i][0])
{
// rt_kprintf("[%s] ad=%d\r\n", __FUNCTION__, ad);
// t = t0 + (adc - adc0) * k
temp_f = tm7705_ntc_temptable[i-1][1] + // t0
(ad - tm7705_ntc_temptable[i-1][0]) * // adc - adc0
((float)(tm7705_ntc_temptable[i][1] - tm7705_ntc_temptable[i-1][1])
/ (float)(tm7705_ntc_temptable[i][0] - tm7705_ntc_temptable[i-1][0]));
rt_kprintf("[%s] temp_f=%d\r\n", __FUNCTION__, (int)temp_f);
return temp_f;
}
}
return 0;
}
/*
* 获取温度值
* @ret 温度值
*/
float tm7705_get_temperature(void)
{
int ret = TM7705_RET_TIMEOUT;
float temp_f = 0;
unsigned short ad = 0;
// 获取AD值
ret = tm7705_get_ad(TM7705_CH_1, &ad);
if (TM7705_RET_OK != ret)
{
rt_kprintf("[%s] tm7705_get_ad() fail, ret=%d\r\n", __FUNCTION__, ret);
return ret;
}
// 计算温度值
temp_f = tm7705_calc_temp_from_ad(ad);
return temp_f;
}
把RTT统一的标准的SPI接口移植到龙芯1C上
这一部分主要讨论一下移植的具体细节和思路。整个移植最核心的也就是两个函数configure()和xfer(),这两个函数为struct rt_spi_ops的成员,也是RTT的SPI接口的核心所在。
在龙芯1c库的SPI接口中,已经实现了配置和收发功能,只是配置功能被拆分为多个函数而已。比如设置时钟调用ls1c_spi_set_clock(),设置spi模式调用ls1c_spi_set_mode()等。
源码行数不多,相信大家一看就能明白,这里直接贴源码了
drv_spi.c
bsp\ls1cdev\drivers\drv_spi.c
/*
* File : drv_spi.c
* This file is part of RT-Thread RTOS
* COPYRIGHT (C) 2006 - 2012, RT-Thread Development Team
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; either version 2 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License along
* with this program; if not, write to the Free Software Foundation, Inc.,
* 51 Franklin Street, Fifth Floor, Boston, MA 02110-1301 USA.
*
* Change Logs:
* Date Author Notes
* 2017-11-02 勤为本 first version
*/
#include <rtthread.h>
#include <drivers/spi.h>
#include "drv_spi.h"
//#define DEBUG
#ifdef DEBUG
#define DEBUG_PRINTF(...) rt_kprintf(__VA_ARGS__)
#else
#define DEBUG_PRINTF(...)
#endif
static rt_err_t configure(struct rt_spi_device *device, struct rt_spi_configuration *configuration);
static rt_uint32_t xfer(struct rt_spi_device *device, struct rt_spi_message *message);
static struct rt_spi_ops ls1c_spi_ops =
{
.configure = configure,
.xfer = xfer
};
static rt_err_t configure(struct rt_spi_device *device,
struct rt_spi_configuration *configuration)
{
struct rt_spi_bus *spi_bus = NULL;
struct ls1c_spi *ls1c_spi = NULL;
unsigned char SPIx = 0;
void *spi_base = NULL;
unsigned char cpol = 0;
unsigned char cpha = 0;
unsigned char val = 0;
RT_ASSERT(NULL != device);
RT_ASSERT(NULL != configuration);
spi_bus = device->bus;
ls1c_spi = (struct ls1c_spi *)spi_bus->parent.user_data;
SPIx = ls1c_spi->SPIx;
spi_base = ls1c_spi_get_base(SPIx);
{
// 使能SPI控制器,master模式,关闭中断
reg_write_8(0x53, spi_base + LS1C_SPI_SPCR_OFFSET);
// 清空状态寄存器
reg_write_8(0xc0, spi_base + LS1C_SPI_SPSR_OFFSET);
// 1字节产生中断,采样(读)与发送(写)时机同时
reg_write_8(0x03, spi_base + LS1C_SPI_SPER_OFFSET);
// 关闭SPI flash
val = reg_read_8(spi_base + LS1C_SPI_SFC_PARAM_OFFSET);
val &= 0xfe;
reg_write_8(val, spi_base + LS1C_SPI_SFC_PARAM_OFFSET);
// spi flash时序控制寄存器
reg_write_8(0x05, spi_base + LS1C_SPI_SFC_TIMING_OFFSET);
}
// baudrate
ls1c_spi_set_clock(spi_base, configuration->max_hz);
// 设置通信模式(时钟极性和相位)
if (configuration->mode & RT_SPI_CPOL) // cpol
{
cpol = SPI_CPOL_1;
}
else
{
cpol = SPI_CPOL_0;
}
if (configuration->mode & RT_SPI_CPHA) // cpha
{
cpha = SPI_CPHA_1;
}
else
{
cpha = SPI_CPHA_0;
}
ls1c_spi_set_mode(spi_base, cpol, cpha);
DEBUG_PRINTF("ls1c spi%d configuration\n", SPIx);
return RT_EOK;
}
static rt_uint32_t xfer(struct rt_spi_device *device,
struct rt_spi_message *message)
{
struct rt_spi_bus *spi_bus = NULL;
struct ls1c_spi *ls1c_spi = NULL;
void *spi_base = NULL;
unsigned char SPIx = 0;
struct ls1c_spi_cs *ls1c_spi_cs = NULL;
unsigned char cs = 0;
rt_uint32_t size = 0;
const rt_uint8_t *send_ptr = NULL;
rt_uint8_t *recv_ptr = NULL;
rt_uint8_t data = 0;
RT_ASSERT(NULL != device);
RT_ASSERT(NULL != message);
spi_bus = device->bus;
ls1c_spi = spi_bus->parent.user_data;
SPIx = ls1c_spi->SPIx;
spi_base = ls1c_spi_get_base(SPIx);
ls1c_spi_cs = device->parent.user_data;
cs = ls1c_spi_cs->cs;
size = message->length;
DEBUG_PRINTF("[%s] SPIx=%d, cs=%d\n", __FUNCTION__, SPIx, cs);
// take cs
if (message->cs_take)
{
ls1c_spi_set_cs(spi_base, cs, 0);
}
// 收发数据
send_ptr = message->send_buf;
recv_ptr = message->recv_buf;
while (size--)
{
data = 0xFF;
if (NULL != send_ptr)
{
data = *send_ptr++;
}
if (NULL != recv_ptr)
{
*recv_ptr++ = ls1c_spi_txrx_byte(spi_base, data);
}
else
{
ls1c_spi_txrx_byte(spi_base, data);
}
}
// release cs
if (message->cs_release)
{
ls1c_spi_set_cs(spi_base, cs, 1);
}
return message->length;
}
#ifdef RT_USING_SPI0
struct ls1c_spi ls1c_spi0 =
{
.SPIx = LS1C_SPI_0,
};
static struct rt_spi_bus spi0_bus;
#endif
#ifdef RT_USING_SPI1
struct ls1c_spi ls1c_spi1 =
{
.SPIx = LS1C_SPI_1,
};
static struct rt_spi_bus spi1_bus;
#endif
/*
* 初始化并注册龙芯1c的spi总线
* @SPI SPI总线,比如LS1C_SPI_0, LS1C_SPI_1
* @spi_bus_name 总线名字
* @ret
*/
rt_err_t ls1c_spi_bus_register(rt_uint8_t SPI, const char *spi_bus_name)
{
struct rt_spi_bus *spi_bus = NULL;
#ifdef RT_USING_SPI0
if (LS1C_SPI_0 == SPI)
{
spi_bus = &spi0_bus;
spi_bus->parent.user_data = &ls1c_spi0;
}
#endif
#ifdef RT_USING_SPI1
if (LS1C_SPI_1 == SPI)
{
spi_bus = &spi1_bus;
spi_bus->parent.user_data = &ls1c_spi1;
}
#endif
return rt_spi_bus_register(spi_bus, spi_bus_name, &ls1c_spi_ops);
}
drv_spi.h
bsp\ls1cdev\drivers\drv_spi.h
/*
* File : drv_spi.h
* This file is part of RT-Thread RTOS
* COPYRIGHT (C) 2006 - 2012, RT-Thread Development Team
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; either version 2 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License along
* with this program; if not, write to the Free Software Foundation, Inc.,
* 51 Franklin Street, Fifth Floor, Boston, MA 02110-1301 USA.
*
* Change Logs:
* Date Author Notes
* 2017-11-02 勤为本 first version
*/
#ifndef LS1C_DRV_SPI_H
#define LS1C_DRV_SPI_H
#include "../libraries/ls1c_spi.h"
struct ls1c_spi
{
unsigned char SPIx; // LS1C_SPI_0 or LS1C_SPI_1
};
struct ls1c_spi_cs
{
unsigned char cs; // LS1C_SPI_CS_0, LS1C_SPI_CS_1, LS1C_SPI_CS_2 or LS1C_SPI_CS_3
};
/*
* 初始化并注册龙芯1c的spi总线
* @SPI SPI总线,比如LS1C_SPI_0, LS1C_SPI_1
* @spi_bus_name 总线名字
* @ret
*/
rt_err_t ls1c_spi_bus_register(rt_uint8_t SPI, const char *spi_bus_name);
#endif
ls1c_spi.c
bsp\ls1cdev\libraries\ls1c_spi.c
/*
* File : ls1c_spi.c
* This file is part of RT-Thread RTOS
* COPYRIGHT (C) 2006 - 2012, RT-Thread Development Team
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; either version 2 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License along
* with this program; if not, write to the Free Software Foundation, Inc.,
* 51 Franklin Street, Fifth Floor, Boston, MA 02110-1301 USA.
*
* Change Logs:
* Date Author Notes
* 2017-10-23 勤为本 first version
*/
// 硬件spi接口源文件
#include <string.h>
#include "ls1c_public.h"
#include "ls1c_regs.h"
#include "ls1c_clock.h"
#include "ls1c_spi.h"
/*
* 获取指定SPI模块的基地址
* @SPIx SPI模块的编号
*/
inline void *ls1c_spi_get_base(unsigned char SPIx)
{
void *base = NULL;
switch (SPIx)
{
case LS1C_SPI_0:
base = (void *)LS1C_SPI0_BASE;
break;
case LS1C_SPI_1:
base = (void *)LS1C_SPI1_BASE;
break;
default:
base = NULL;
break;
}
return base;
}
/*
* 打印指定SPI模块的所有寄存器的值
* @spi_base 基地址
*/
void ls1c_spi_print_all_regs_info(void *spi_base)
{
rt_kprintf("[%s] SPCR=0x%x, SPSR=0x%x, SPER=0x%x, SFC_PARAM=0x%x, SFC_SOFTCS=0x%x, SFC_TIMING=0x%x\r\n",
__FUNCTION__,
reg_read_8(spi_base + LS1C_SPI_SPCR_OFFSET),
reg_read_8(spi_base + LS1C_SPI_SPSR_OFFSET),
reg_read_8(spi_base + LS1C_SPI_SPER_OFFSET),
reg_read_8(spi_base + LS1C_SPI_SFC_PARAM_OFFSET),
reg_read_8(spi_base + LS1C_SPI_SFC_SOFTCS_OFFSET),
reg_read_8(spi_base + LS1C_SPI_SFC_TIMING_OFFSET));
return ;
}
/*
* 根据SPI时钟频率计算分频系数
* @max_speed_hz SPI最大通信速度
* @ret 分频系数
*/
unsigned int ls1c_spi_get_div(unsigned int max_speed_hz)
{
unsigned long clk = 0;
unsigned int div = 0;
unsigned int div_tmp = 0;
unsigned int bit = 0;
clk = clk_get_apb_rate();
div = DIV_ROUND_UP(clk, max_speed_hz);
if (div < 2)
div = 2;
if (div > 4096)
div = 4096;
bit = ls1c_fls(div) - 1;
switch (1 << bit)
{
case 16:
div_tmp = 2;
if (div > (1 << bit))
{
div_tmp++;
}
break;
case 32:
div_tmp = 3;
if (div > (1 << bit))
{
div_tmp += 2;
}
break;
case 8:
div_tmp = 4;
if (div > (1 << bit))
{
div_tmp -= 2;
}
break;
default:
div_tmp = bit - 1;
if (div > (1 << bit))
{
div_tmp++;
}
break;
}
/*
rt_kprintf("[%s] clk=%ld, max_speed_hz=%d, div_tmp=%d, bit=%d\r\n",
__FUNCTION__, clk, max_speed_hz, div_tmp, bit);
*/
return div_tmp;
}
/*
* 设置时钟
* @spi_base 基地址
* @max_hz 最大频率,单位hz
*/
void ls1c_spi_set_clock(void *spi_base, unsigned long max_hz)
{
unsigned int div = 0;
unsigned char val = 0;
// 获取分频系数
div = ls1c_spi_get_div(max_hz);
// 设置spr
val = reg_read_8(spi_base + LS1C_SPI_SPCR_OFFSET);
val &= (~LS1C_SPI_SPCR_SPR_MASK); // spr清零
val |= (div & LS1C_SPI_SPCR_SPR_MASK); // 设置新的spr
reg_write_8(val, spi_base + LS1C_SPI_SPCR_OFFSET);
// 设置spre
val = reg_read_8(spi_base + LS1C_SPI_SPER_OFFSET);
val &= (~LS1C_SPI_SPER_SPRE_MASK); // spre清零
val |= ((div >> 2) & LS1C_SPI_SPER_SPRE_MASK); // 设置新的spre
reg_write_8(val, spi_base + LS1C_SPI_SPER_OFFSET);
return ;
}
/*
* 设置通信模式(时钟极性和相位)
* @spi_base 基地址
* @cpol 时钟极性
* @cpha 时钟相位
*/
void ls1c_spi_set_mode(void *spi_base, unsigned char cpol, unsigned char cpha)
{
unsigned char val = 0;
val = reg_read_8(spi_base + LS1C_SPI_SPCR_OFFSET);
// 设置时钟极性--cpol
val &= (~LS1C_SPI_SPCR_CPOL_MASK); // cpol清0
val |= (cpol << LS1C_SPI_SPCR_CPOL_BIT); // 写入新的cpol
// 设置时钟相位--cpha
val &= (~LS1C_SPI_SPCR_CPHA_MASK); // cpha清0
val |= (cpha << LS1C_SPI_SPCR_CPHA_BIT); // 写入新的cpha
reg_write_8(val, spi_base + LS1C_SPI_SPCR_OFFSET);
return ;
}
/*
* 设置指定片选为指定状态
* @spi_base 基地址
* @cs 片选
* @new_status 片选引脚的新状态,取值为0或1,即高电平或低电平
*/
void ls1c_spi_set_cs(void *spi_base, unsigned char cs, int new_status)
{
unsigned char val = 0;
val = 0xf0 | (0x01 << cs); // 全部csn=1,指定的csen=1
if (new_status) // cs = 1
{
val |= (0x10 << cs); // 指定csn=1
}
else // cs = 0
{
val &= ~(0x10 << cs); // 指定csn=0
}
reg_write_8(val, spi_base + LS1C_SPI_SFC_SOFTCS_OFFSET);
return ;
}
/*
* 等待收发完成
* @spi_base 基地址
*/
inline void ls1c_spi_wait_txrx_done(void *spi_base)
{
int timeout = LS1C_SPI_TX_TIMEOUT;
while (timeout--)
{
if (LS1C_SPI_SPSR_SPIF_MASK & reg_read_8(spi_base + LS1C_SPI_SPSR_OFFSET))
break;
}
return ;
}
/*
* 清中断和标志位
* @spi_base 基地址
*/
inline void ls1c_spi_clear(void *spi_base)
{
unsigned char val = 0;
// 清中断
val = reg_read_8(spi_base + LS1C_SPI_SPSR_OFFSET);
val |= LS1C_SPI_SPSR_SPIF_MASK;
reg_write_8(val, spi_base + LS1C_SPI_SPSR_OFFSET);
// 清溢出标志位(Write-Collision Clear)
val = reg_read_8(spi_base + LS1C_SPI_SPSR_OFFSET);
if (LS1C_SPI_SPSR_WCOL_MASK & val)
{
rt_kprintf("[%s] clear register SPSR's wcol!\r\n"); // 手册和linux源码中不一样,加个打印看看
reg_write_8(val & ~LS1C_SPI_SPSR_WCOL_MASK, spi_base + LS1C_SPI_SPSR_OFFSET); // 写0,linux源码中是写0
// reg_write_8(val | LS1C_SPI_SPSR_WCOL_MASK, spi_base + LS1C_SPI_SPSR_OFFSET); // 写1,按照1c手册,应该写1
}
return ;
}
/*
* 通过指定SPI发送接收一个字节
* 注意,在多任务的系统中,此函数需要互斥。
* 即保证在和某个从设备收发某个字节的过程中,不能被切换到其它任务同时与另外的在同一个SPI总线上的从设备通信
* 因为龙芯1c的每路SPI上可能接有不同的从设备,通信频率、模式等可能不同
* @spi_base 基地址
* @tx_ch 待发送的数据
* @ret 收到的数据
*/
unsigned char ls1c_spi_txrx_byte(void *spi_base, unsigned char tx_ch)
{
unsigned char rx_ch = 0;
// 收发数据
reg_write_8(tx_ch, spi_base + LS1C_SPI_TxFIFO_OFFSET); // 开始发送
ls1c_spi_wait_txrx_done(spi_base); // 等待收发完成
rx_ch = reg_read_8(spi_base + LS1C_SPI_RxFIFO_OFFSET); // 读取收到的数据
ls1c_spi_clear(spi_base); // 清中断和标志位
return rx_ch;
}
ls1c_spi.h
bsp\ls1cdev\libraries\ls1c_spi.h
/* * File : ls1c_spi.h * This file is part of RT-Thread RTOS * COPYRIGHT (C) 2006 - 2012, RT-Thread Development Team * * This program is free software; you can redistribute it and/or modify * it under the terms of the GNU General Public License as published by * the Free Software Foundation; either version 2 of the License, or * (at your option) any later version. * * This program is distributed in the hope that it will be useful, * but WITHOUT ANY WARRANTY; without even the implied warranty of * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the * GNU General Public License for more details. * * You should have received a copy of the GNU General Public License along * with this program; if not, write to the Free Software Foundation, Inc., * 51 Franklin Street, Fifth Floor, Boston, MA 02110-1301 USA. * * Change Logs: * Date Author Notes * 2017-10-23 勤为本 first version */ // 硬件spi接口的头文件 #ifndef __OPENLOONGSON_SPI_H #define __OPENLOONGSON_SPI_H // SPI模块编号 #define LS1C_SPI_0 (0) #define LS1C_SPI_1 (1) // 片选 #define LS1C_SPI_CS_0 (0) #define LS1C_SPI_CS_1 (1) #define LS1C_SPI_CS_2 (2) #define LS1C_SPI_CS_3 (3) // 时钟极性和相位 #define SPI_CPOL_1 (1) #define SPI_CPOL_0 (0) #define SPI_CPHA_1 (1) #define SPI_CPHA_0 (0) // 寄存器偏移 #define LS1C_SPI_SPCR_OFFSET (0) // 控制寄存器 #define LS1C_SPI_SPSR_OFFSET (1) // 状态寄存器 #define LS1C_SPI_TxFIFO_OFFSET (2) // 发送的数据寄存器,与接收数据寄存器的偏移相同 #define LS1C_SPI_RxFIFO_OFFSET (2) // 接收的数据寄存器,与发送数据寄存器的偏移相同 #define LS1C_SPI_SPER_OFFSET (3) // 外部寄存器 #define LS1C_SPI_SFC_PARAM_OFFSET (4) // 参数控制寄存器 #define LS1C_SPI_SFC_SOFTCS_OFFSET (5) // 片选控制寄存器 #define LS1C_SPI_SFC_TIMING_OFFSET (6) // 时序控制寄存器 // 寄存器SPCR中的位域 #define LS1C_SPI_SPCR_SPIE_BIT (7) #define LS1C_SPI_SPCR_SPIE_MASK (0x01 << LS1C_SPI_SPCR_SPIE_BIT) #define LS1C_SPI_SPCR_SPE_BIT (6) #define LS1C_SPI_SPCR_SPE_MASK (0x01 << LS1C_SPI_SPCR_SPE_BIT) #define LS1C_SPI_SPCR_CPOL_BIT (3) #define LS1C_SPI_SPCR_CPOL_MASK (0x01 << LS1C_SPI_SPCR_CPOL_BIT) #define LS1C_SPI_SPCR_CPHA_BIT (2) #define LS1C_SPI_SPCR_CPHA_MASK (0x01 << LS1C_SPI_SPCR_CPHA_BIT) #define LS1C_SPI_SPCR_SPR_BIT (0) #define LS1C_SPI_SPCR_SPR_MASK (0x03 << LS1C_SPI_SPCR_SPR_BIT) // 寄存器SPSR中的位域 #define LS1C_SPI_SPSR_SPIF_BIT (7) #define LS1C_SPI_SPSR_SPIF_MASK (0x01 << LS1C_SPI_SPSR_SPIF_BIT) #define LS1C_SPI_SPSR_WCOL_BIT (6) #define LS1C_SPI_SPSR_WCOL_MASK (0x01 << LS1C_SPI_SPSR_WCOL_BIT) // 寄存器SPER中的位域 #define LS1C_SPI_SPER_SPRE_BIT (0) #define LS1C_SPI_SPER_SPRE_MASK (0x3 << LS1C_SPI_SPER_SPRE_BIT) // 寄存器SFC_SOFTCS的位域 #define LS1C_SPI_SFC_SOFTCS_CSN_BIT (4) #define LS1C_SPI_SFC_SOFTCS_CSN_MASK (0x0f << LS1C_SPI_SFC_SOFTCS_CSN_BIT) #define LS1C_SPI_SFC_SOFTCS_CSEN_BIT (0) #define LS1C_SPI_SFC_SOFTCS_CSEN_MASK (0x0f << LS1C_SPI_SFC_SOFTCS_CSEN_BIT) // 发送超时的门限值 #define LS1C_SPI_TX_TIMEOUT (20000) /* * 获取指定SPI模块的基地址 * @SPIx SPI模块的编号 */ inline void *ls1c_spi_get_base(unsigned char SPIx); /* * 设置时钟 * @spi_base 基地址 * @max_hz 最大频率,单位hz */ void ls1c_spi_set_clock(void *spi_base, unsigned long max_hz); /* * 设置通信模式(时钟极性和相位) * @spi_base 基地址 * @cpol 时钟极性 * @cpha 时钟相位 */ void ls1c_spi_set_mode(void *spi_base, unsigned char cpol, unsigned char cpha); /* * 设置指定片选为指定状态 * @spi_base 基地址 * @cs 片选 * @new_status 片选引脚的新状态,取值为0或1,即高电平或低电平 */ void ls1c_spi_set_cs(void *spi_base, unsigned char cs, int new_status); /* * 通过指定SPI发送接收一个字节 * 注意,在多任务的系统中,此函数需要互斥。 * 即保证在和某个从设备收发某个字节的过程中,不能被切换到其它任务同时与另外的在同一个SPI总线上的从设备通信 * 因为龙芯1c的每路SPI上可能接有不同的从设备,通信频率、模式等可能不同 * @spi_base 基地址 * @tx_ch 待发送的数据 * @ret 收到的数据 */ unsigned char ls1c_spi_txrx_byte(void *spi_base, unsigned char tx_ch); /* * 打印指定SPI模块的所有寄存器的值 * @spi_base 基地址 */ void ls1c_spi_print_all_regs_info(void *spi_base); #endif
感谢阅读!