OULU数据集用于anti-spoofing的测试,里面包含了打印攻击、回放攻击等一些攻击类型,想要具体了解OULU的数据概况的学者们,请读下OULU的原文,本人就不在这里详述了。OULU原文链接如下:OULU数据集 PDF版原文
在用OULU对你设计的模型进行指标测试时,需要注意的一点是:你需要在OULU提供的四个协议上分别进行测试,OULU的前两个协议文件分别只有一个训练txt文件,而后两个协议则分别包含了6个训练文件,dev,test文件在这四个协议中也是如此!这四个协议是作者分别针对不同的攻击环境来进行设置的,具体如下:
| 协议名 | 含义 |
|---|---|
| P1 | 评估在背景与光照上的泛化能力(未知的光照与背景变化的泛化能力) |
| P2 | 对不同类型的打印和视频攻击进行训练和测试,来评估泛化能力(未知的攻击介质的泛化能力) |
| P3 | 对图像捕获设备的类型进行泛化评估 |
| P4 | 结合P1-P3上的所有变化,来评估泛化能力 |
借此机会,我把SIW数据集的三个测试协议也放上,感兴趣的学者们可以了解下:
| 协议名 | 含义 |
|---|---|
| P1 | 评估对姿势和表情变化的泛化能力 |
| P2 | 评估在不同回放攻击设备上的泛化能力 |
| P3 | 通过在专门包含重放攻击或打印攻击视频的数据集上进行 |
一些研究者在OULU数据集上的测试结果:
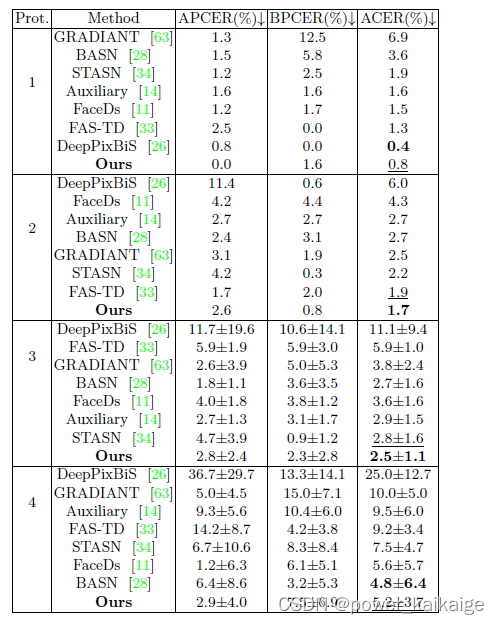
上图第一列代表的是测试协议名,第二列代表模型名字,其中协议3与协议4中值代表“均值±方差”;
在用OULU的四个协议对你的模型测试时,切记,千万不要直接用求出来的TN,TP,FN,FP来直接求APCER,BPCER,ACER,这样的测试方式是不对的,本人一开始就是用这样的方式来求APCER这些指标的,结果发现测出来的指标出奇的好,后来是通过读OULU那篇原论文才发现,这样得测试方式是不对的!害,白白地让我瞎折腾了将近2个月,泪奔!
对于正确的测试方法,原文是这样写的:
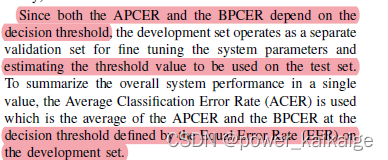
它的大致意思就是:APCER与BPCER依赖于一个决策阈值,development集(可以理解为一个验证集)作为一个分离的验证集运行,用于调节模型的参数,并预测阈值以供测试集使用;也就是说:由验证集development set得到一个阈值threshold,而测试集利用验证集得到的这个threshold进行APCER,BPCER的指标测试!
用代码的表示上述的测试方式如下:
#创建一个用于验证集测试的类变量
pad_meter_val = PADMeter()
#图像送入模型
output,_ = model(img)
#预测概率
class_output = nn.functional.softmax(output, dim=1)
#测量TP,TN,FP,FN
pad_meter_val.update(target.cpu().data.numpy(),class_output.cpu().data.numpy())
#求eer,阈值thr
pad_meter_val.get_eer_and_thr()
#用阈值thr求hter,apcer,bpcer
pad_meter_val.get_hter_apcer_etal_at_thr(pad_meter_val.threshold)
#用阈值thr求acc
pad_meter_val.get_accuracy(pad_meter_val.threshold)
####################################################
#创建一个用于测试集测试的类变量
pad_meter_test = PADMeter()
#图像送入模型
output,_ = model(img)
#预测概率
class_output1 = nn.functional.softmax(output, dim=1)
#得到TP,TN,FP,FN
pad_meter_test.update(target.cpu().data.numpy(),class_output1.cpu().data.numpy())
#在验证集得到的阈值下,测量测试集的hter,apcer等指标
pad_meter_test.get_hter_apcer_etal_at_thr(pad_meter_val.threshold)
#验证集得到的阈值下,测量测试集的acc指标
pad_meter_test.get_accuracy(pad_meter_val.threshold)
PADMeter()类封装的一些具体实现细节如下:
import math
import numpy as np
from sklearn.metrics import roc_curve, accuracy_score
from sklearn.metrics import roc_auc_score
from torch import nn
class PADMeter(object):
"""Presentation Attack Detection Meter"""
def __init__(self):
self.reset()
def reset(self):
self.label = np.ones(0)
self.output = np.ones(0)
self.threshold = None
self.grid_density = 10000
def update(self, label, output):
#一般取softmax之后,第1维度上的第1列数据
if len(output.shape) > 1 and output.shape[1] > 1:
output = output[:, 1]
elif len(output.shape) > 1 and output.shape[1] == 1:
output = output[:, 0]
#拼接,将新的数据拼接到已有的后方
self.label = np.hstack([self.label, label])
self.output = np.hstack([self.output, output])
def get_tpr(self, fixed_fpr):
fpr, tpr, thr = roc_curve(self.label, self.output)
tpr_filtered = tpr[fpr <= fixed_fpr]
if len(tpr_filtered) == 0:
self.tpr = 0.0
self.tpr = tpr_filtered[-1]
def eval_stat(self, thr):
pred = self.output >= thr
TN = np.sum((self.label == 0) & (pred == False))
FN = np.sum((self.label == 1) & (pred == False))
FP = np.sum((self.label == 0) & (pred == True))
TP = np.sum((self.label == 1) & (pred == True))
if TN + FP == 0:
TN += 0.0001
if TP + FN == 0:
TP += 0.0001
return TN, FN, FP, TP
def get_eer_and_thr(self):
thresholds = []
Min, Max = min(self.output), max(self.output)
for i in range(self.grid_density + 1):
thresholds.append(Min + i * (Max - Min) / float(self.grid_density))
min_dist = 1.0
min_dist_stats = []
for thr in thresholds:
TN, FN, FP, TP = self.eval_stat(thr)
far = FP / float(TN + FP)
frr = FN / float(TP + FN)
dist = math.fabs(far - frr)
if dist < min_dist:
min_dist = dist
min_dist_stats = [far, frr, thr]
# for exception
if len(min_dist_stats) >= 2:
self.eer = (min_dist_stats[0] + min_dist_stats[1]) / 2.0
self.threshold = min_dist_stats[2]
else:
self.eer = 0.5
self.threshold = 0.5
def get_hter_apcer_etal_at_thr(self, thr=None):
if thr is None:
self.get_eer_and_thr()
thr = self.threshold
TN, FN, FP, TP = self.eval_stat(thr)
far = FP / float(TN + FP)
frr = FN / float(TP + FN)
fpr = FP / float(FP + TN)
tpr = TP / float(TP + FN)
fpr1, tpr1, _ = roc_curve(self.label, self.output, pos_label=1)
# print(type(fpr),fpr.shape,fpr.size())
# TPR@FPR=e-2
# tpr1 = np.array(tpr)
# fpr1 = np.array(fpr)
# print(type(fpr1), fpr1.shape,len(fpr1))
# print(fpr1)
score_1 = tpr1[np.where(fpr1 >= 0.01)[0][0]]
# TPR@FPR=e-3
score_2 = tpr1[np.where(fpr1 >= 0.001)[0][0]]
# TPR@FPR=e-4
score_3 = tpr1[np.where(fpr1 >= 0.0001)[0][0]]
self.TN = TN
self.FN = FN
self.FP = FP
self.TP = TP
self.apcer = far
self.bpcer = frr
self.acer = (self.apcer + self.bpcer) / 2.0
self.hter = (far + frr) / 2.0
self.fpr = fpr
self.tpr = tpr
self.score1 = score_1
self.score2 = score_2
self.score3 = score_3
try:
self.auc = roc_auc_score(self.label, self.output)
except ValueError:
pass
def get_accuracy(self, thr=None):
if thr == None:
self.get_eer_and_thr()
thr = self.threshold
TN, FN, FP, TP = self.eval_stat(thr)
self.accuracy = accuracy = float(TP + TN) / len(self.output)到此就结束了,在此祝各位学者科研顺利!