引言
本文旨在介绍一种基于深度学习的实时图像分割方法。通过深入探讨图像分割的基本原理和相关概念,并结合代码实例,我们将逐步展示如何使用这一方法来实现高效、准确的图像分割。本文还将讨论该技术在计算机视觉领域的应用前景。
文章目录
前言
计算机科学和工程领域的技术进步和创新为我们带来了前所未有的机遇和挑战。其中,基于深度学习的实时图像分割技术是引人注目的成果之一。本文将深入介绍图像分割的原理和深度学习的应用,重点讨论高难度的实时图像分割方法,并提供清晰的代码示例。
通过介绍图像分割的基本原理,包括像素级和基于区域的分割。然后,详细讨论深度学习在图像分割中的作用,并介绍U-Net模型作为主要工具。解析U-Net的网络结构、损失函数的选择以及数据集准备和预处理的重要性,让读者具有一个基本认知。
文章重点讨论的是实现实时图像分割的关键技术,如并行计算和硬件优化,以提高算法效率。同时,探讨模型的部署与优化,确保实时性能满足需求。为了评估实时性能,介绍一些评估指标,帮助读者准确评估实时图像分割系统。
在代码实例部分,提供了基于U-Net的实时图像分割代码示例。指导读者进行环境配置和依赖项安装,并详细介绍数据集准备和预处理步骤。
希望读者阅读本文后 能深入了解实时图像分割技术,掌握基本原理和关键技术,并能够通过代码实例进行实际应用。
1 图像分割的基本原理
1.1 像素级图像分割
像素级图像分割是一种将图像中的每个像素标记为属于不同对象的一部分的图像分割方法。其目标是将图像分割成具有语义意义的区域,使每个像素都与其所属的对象或物体相关联。
在像素级图像分割中,每个像素都被赋予一个特定的类别或标签,以指示其所属的对象或区域。这种分割技术可以提供更详细和准确的图像分割结果,适用于需要像素级别细节的任务,如目标检测、图像分析和图像编辑等。
传统的像素级图像分割方法主要基于图像处理技术和特征工程。它们通常依赖于手工设计的特征提取和分类算法来对图像进行分割。这些方法在一些简单场景下表现良好,但对于复杂的图像,其准确性和鲁棒性有限。
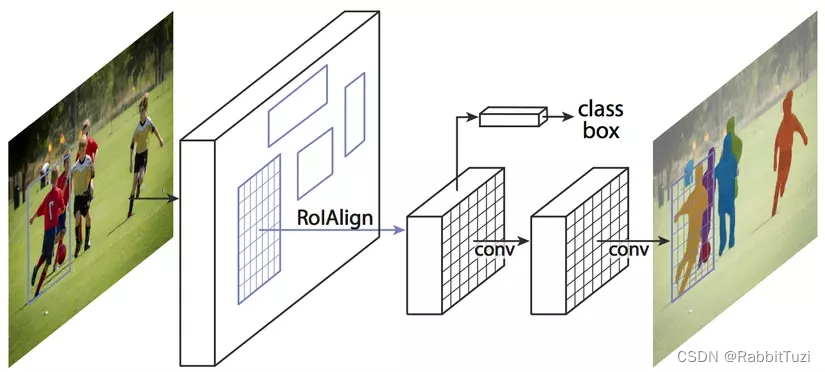
近年来,深度学习技术的发展为像素级图像分割带来了革命性的突破。深度学习模型,如卷积神经网络(CNN),能够自动从图像中学习特征,并利用这些特征进行像素级别的分类和分割。其中,全卷积网络(Fully Convolutional Network,FCN)是一种常用的深度学习模型,专门用于图像分割任务。FCN通过替换全连接层为全卷积层,实现了对整个图像进行密集预测的能力。
像素级图像分割的关键挑战之一是标注数据的获取。因为每个像素都需要手动标注类别,这对人工标注的工作量和时间要求较高。为了解决这个问题,研究人员通常采用半监督学习、迁移学习或生成对抗网络等技术来减少对标注数据的依赖,提高模型的泛化能力。
1.2 基于区域的图像分割
基于区域的图像分割是另一种常见的图像分割方法,它将图像分割成不同的区域,每个区域内的像素被视为属于同一对象或同一物体。相比于像素级图像分割,基于区域的分割方法更关注于将图像分割成具有空间连续性的区域。
基于区域的图像分割方法通常基于以下原理和技术:
-
区域生长(Region Growing):这是一种迭代的分割方法,从图像中的种子点开始,通过像素之间的相似性判断逐步生长区域。该方法通常使用一些相似度度量来确定像素之间的相似性,如颜色、纹理或梯度等。通过迭代合并相似的像素,形成具有空间连续性的区域。
-
分水岭算法(Watershed Algorithm):该算法基于图像的梯度信息,将图像看作地形地貌,像素强度高的地方类似于山峰,而像素强度低的地方类似于山谷。通过寻找梯度最大的像素作为种子点,并在梯度逐渐下降的过程中进行区域分割,最终形成分割边界。
-
基于图的分割(Graph-based Segmentation):该方法将图像看作是由像素和像素之间的关系构成的图。通过建立图的连接关系,可以利用图分割算法,如最小生成树、图割等,将图像分割为具有连通性的区域。
-
基于聚类的方法(Clustering-based Methods):这些方法使用聚类算法,如k-means聚类、谱聚类等,将图像中的像素分组到不同的簇中。聚类算法通常使用像素之间的相似度度量来确定像素的归属关系,从而实现图像分割。
基于区域的图像分割方法具有一定的优势,例如可以产生具有空间连续性的区域,适用于对图像进行语义分析和对象提取。然而,由于图像中不同区域之间的边界模糊和颜色/纹理的变化,基于区域的方法仍然面临一些挑战,如边界误差、区域过分割或欠分割等。
1.3 深度学习在图像分割中的作用
深度学习在图像分割中扮演着重要的角色,它通过构建深层神经网络模型,实现了对图像的自动特征学习和准确分割。深度学习模型在图像分割任务中的应用取得了显著的成果,以下是深度学习在图像分割中的关键作用:
-
特征学习:传统的图像分割方法需要手工设计特征提取器来表示图像中的关键信息。而深度学习模型能够自动从大量数据中学习到图像的高级特征,无需依赖人工设计。通过多层的卷积神经网络,深度学习模型可以逐渐提取出图像中的抽象特征,从而更好地理解图像的语义信息。
-
上下文建模:深度学习模型在图像分割中能够有效地捕捉到图像中的上下文信息。通过卷积神经网络中的卷积和池化操作,模型可以利用局部区域的像素来推断其周围像素的语义。这种上下文建模的能力使得深度学习模型在处理边界模糊和复杂纹理的图像时更具优势,能够产生更准确的分割结果。
-
编码器-解码器结构:深度学习中常用的图像分割模型,如U-Net、SegNet等,采用了编码器-解码器的网络结构。编码器部分通过多层卷积和池化操作,将输入图像逐步降采样,提取高级抽象特征。解码器部分则通过上采样和反卷积操作,将编码器的特征图恢复到原始图像大小,并逐步还原分割结果。这种编码器-解码器结构使得模型能够在不同尺度上理解和恢复图像的细节信息,提高了分割的精度和准确性。
-
大规模数据和预训练模型:深度学习模型通常需要大量的标注数据进行训练。在图像分割任务中,收集和标注大规模的图像数据是一项艰巨的任务。然而,通过迁移学习和预训练模型,可以利用已经在大规模数据集上训练好的模型来进行图像分割任务。预训练的模型能够提供丰富的语义信息和良好的特征表达,使得在小规模数据集上进行分割时也能取得较好的效果。
2 深度学习模型——U-Net
2.1 U-Net的网络结构
U-Net是一种经典的深度学习网络结构,特别适用于图像分割任务。它的网络结构独特,融合了编码器和解码器的设计,能够有效地捕捉图像的上下文信息并恢复细节。下面是U-Net的网络结构解析:
U-Net的整体结构类似于一个U形,因此得名。它由两个主要部分组成:编码器(Encoder)和解码器(Decoder)。
编码器部分是由一系列的卷积层和池化层构成。它的作用是逐步降采样输入图像,并提取高级的语义特征。这些特征在不同层级上捕捉了不同尺度的上下文信息。每个卷积层通常由多个卷积核组成,用于提取图像中的特征。在每个卷积层之后,通常会应用激活函数,如ReLU,来引入非线性。
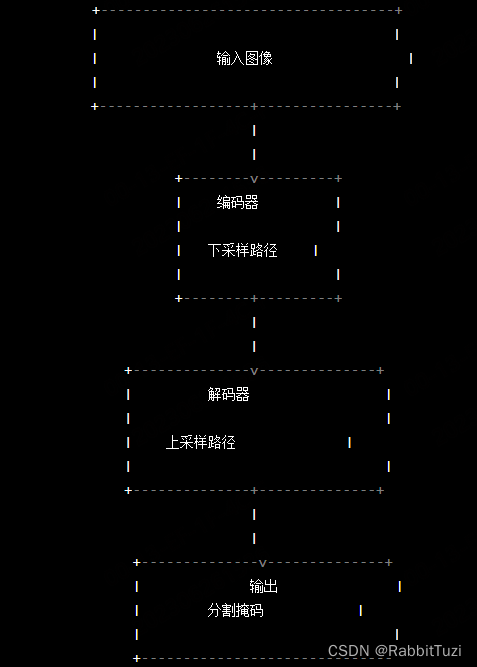
解码器部分是由一系列的上采样层和卷积层构成。它的任务是将编码器中的特征图恢复到原始图像的尺寸,并逐步还原分割结果的细节。上采样层通常使用反卷积或转置卷积操作,将特征图的尺寸放大,同时保留重要的特征信息。解码器的每一层通常与编码器对应层的特征进行连接,以利用跳跃连接(Skip Connections)的方式将低级和高级特征进行融合。
在U-Net的最后一层,通常采用一个1x1卷积层作为输出层,将特征图转换为最终的分割结果。这个输出层通常使用适当的激活函数,如Sigmoid(用于二分类问题)或Softmax(用于多类别问题),来产生像素级别的分割预测。
U-Net的设计理念是通过跳跃连接将编码器和解码器部分连接起来,使得解码器能够利用编码器中的低级和高级特征信息,从而实现更精确的分割结果。这种结构设计可以有效地处理边界模糊、对象形状多样以及图像大小不一致等问题。
2.2 损失函数的选择
在图像分割任务中,选择合适的损失函数对于训练深度学习模型至关重要。损失函数用于度量模型输出与真实标签之间的差异,通过最小化损失函数来优化模型的参数。以下是一些常用的损失函数选择:
-
交叉熵损失函数(Cross-Entropy Loss):交叉熵损失函数常用于多类别图像分割任务。它通过比较模型输出的概率分布与真实标签的概率分布之间的差异来度量损失。交叉熵损失函数能够有效地推动模型学习正确的分类结果,尤其适用于像素级别的多类别分割问题。
-
像素级别损失函数(Pixel-Level Loss):像素级别损失函数直接比较模型输出的像素值与真实标签的像素值之间的差异。常见的像素级别损失函数包括均方误差(Mean Squared Error)和平均绝对误差(Mean Absolute Error)。这些损失函数对于像素值的绝对差异较为敏感,适用于灰度图像分割或二值图像分割任务。
-
Dice损失函数(Dice Loss):Dice损失函数用于度量模型输出与真实标签之间的相似度。它通过计算两者的重叠系数来度量分割的一致性。Dice损失函数在处理不平衡类别和边界模糊的分割问题时表现较好,常用于医学图像分割任务。
-
Jaccard损失函数(Jaccard Loss):Jaccard损失函数也被称为IoU(Intersection over Union)损失函数,用于度量模型输出与真实标签之间的重叠度。它通过计算两者的交集与并集之间的比值来度量分割的准确性。Jaccard损失函数在处理不平衡类别和边界模糊的分割问题时也表现较好。
2.3 数据集准备和预处理
在进行图像分割任务之前,正确准备和预处理数据集对于模型的性能和训练结果至关重要。下面是数据集准备和预处理的一些重要步骤:
-
数据收集和标注:首先,需要收集与任务相关的图像数据。这些数据可以通过各种途径获取,包括在线数据集、数据采集设备等。同时,还需要对图像进行标注,即为每个图像提供对应的像素级别标签,以指示每个像素属于哪个类别或分割对象。
-
数据集划分:将收集到的数据集划分为训练集、验证集和测试集。训练集用于模型的训练,验证集用于调整模型的超参数和监控训练过程,测试集用于评估模型的性能和泛化能力。常用的划分比例是70%训练集、15%验证集和15%测试集,但可以根据具体情况进行调整。
-
数据预处理:在进行图像分割之前,需要对图像数据进行预处理。常见的预处理操作包括图像尺寸调整、图像增强和归一化。图像尺寸调整是将图像的尺寸调整为统一的大小,以满足模型的输入要求。图像增强技术(如旋转、翻转、平移、缩放等)可以增加数据集的多样性和泛化能力,提高模型的鲁棒性。归一化操作可以将图像的像素值映射到固定的范围(如0到1之间),以便更好地训练模型。
-
数据增强:为了增加数据集的多样性和提高模型的泛化能力,可以应用各种数据增强技术。例如,可以对图像进行随机旋转、翻转、缩放、平移等操作,以生成更多样的训练样本。此外,还可以应用亮度调整、对比度增强和颜色转换等方法,增加数据集的多样性。
-
数据扩充:在某些情况下,由于数据集的规模有限,可能需要通过数据扩充来增加样本数量。数据扩充可以使用各种技术,如图像插值、图像平移、仿射变换等来生成新的图像样本。这有助于提高模型的泛化能力和稳定性。
在数据集准备和预处理过程中,要注意保持数据的一致性和可靠性。确保标签与图像对应准确无误,并进行必要的数据质量检查。此外,还可以根据具体任务的需求进行特定的数据预处理,如去除噪声、平衡数据集的类别分布等。这些步骤将为训练高性能的图像分割模型奠定坚实的基础。
3 实现实时图像分割的关键技术
3.1 图像分割的加速方法
图像分割是一项计算密集型任务,特别是在处理大型图像或复杂场景时。为了加速图像分割过程并提高算法的实时性,可以采用以下一些加速方法:
-
硬件加速:使用专门的硬件加速器,如图形处理单元(GPU)或张量处理单元(TPU),可以显著提高图像分割的速度。这些硬件加速器可以并行处理大规模的计算任务,加快模型的推理过程。通过使用高性能的硬件加速器,可以在保持准确性的同时获得更快的图像分割速度。
-
模型压缩:对深度学习模型进行压缩可以减少模型的计算和存储需求,从而提高图像分割的速度。常用的模型压缩方法包括剪枝(Pruning)、量化(Quantization)和模型蒸馏(Knowledge Distillation)。这些方法可以减少模型中不必要的参数和操作,提高模型的运行效率。
-
并行计算:通过将图像分割任务分解为多个子任务,并在多个处理单元上并行计算,可以加速整个图像分割过程。例如,可以将图像划分为多个区域,并使用并行计算的方式同时处理这些区域。这种并行计算的方法可以充分利用多核处理器或分布式计算环境的性能,提高图像分割的速度。
-
尺度处理:对于大尺寸的图像,可以通过多尺度处理的方式来加速图像分割。首先,可以对原始图像进行下采样或分割为多个小块,在较小的尺寸上进行分割。然后,可以将分割结果进行上采样或合并,以恢复到原始图像的尺寸。这种尺度处理的方法可以减少大尺寸图像上的计算量,提高分割速度。
-
模型优化:对图像分割模型进行优化,包括网络结构的简化和优化、算法参数的调整等,可以提高模型的运行效率。例如,可以减少模型的层数、通道数或参数量,以降低计算复杂度。此外,还可以调整模型的超参数,如学习率、批量大小等,以提高模型的收敛速度和性能。
通过硬件加速、模型压缩、并行计算、尺度处理和模型优化等方法,可以有效地加速图像分割任务,提高算法的实时性和性能。具体采用哪种加速方法应根据具体应用场景和需求进行选择。
3.2 模型部署与优化
在完成图像分割算法的开发和训练后,需要将模型部署到实际应用中,并进行优化以提高性能和效率。以下是模型部署与优化的关键步骤:
-
模型转换:将训练好的模型从训练环境中导出,并转换成适合部署的格式。常见的模型转换方法包括将模型转换为TensorFlow SavedModel、ONNX(Open Neural Network Exchange)格式或具体硬件平台支持的格式。这样可以确保模型可以在目标部署环境中进行加载和推理。
-
模型部署:选择合适的部署环境和方式将模型部署到目标设备或平台上。这可能涉及将模型部署到云端服务器、边缘设备、移动设备或嵌入式系统中。根据实际需求,可以选择使用各种部署工具和框架,如TensorFlow Serving、TorchServe、TensorRT等,以实现高效的模型部署。
-
推理优化:在部署模型后,进行推理优化以提高模型的性能和效率。这包括针对目标硬件平台的优化,如使用GPU加速、针对特定处理器的指令集优化等。还可以使用模型量化技术将模型参数转换为低精度表示,减少计算量和内存占用,同时提高推理速度。
-
前后处理优化:对输入数据和输出结果进行前后处理的优化也是重要的一步。可以通过调整输入图像的大小、颜色空间转换、数据归一化等方式,以适应模型的输入要求并提高处理速度。同样,对模型输出的后处理,如阈值化、边界平滑等操作,可以优化结果的质量和准确性。
-
模型压缩与量化:为了减小模型的体积和提高推理速度,可以使用模型压缩和量化技术。这包括剪枝(Pruning)、权重共享(Weight Sharing)、低秩分解(Low-Rank Decomposition)等方法,可以减少模型的参数量和计算量。此外,量化技术将浮点数模型参数转换为低精度整数,从而减少存储空间和计算复杂度。
-
运行时优化:在模型部署后,可以使用性能分析工具和监测工具对模型的运行时性能进行监测和优化。通过分析模型在实际场景中的性能瓶颈和耗时操作,可以进行针对性的优化措施,如算法改进、异步计算、多线程并行等,以提高整体性能和实时性。
3.3 实时性能的评估指标
在评估图像分割算法的实时性能时,可以使用以下指标进行衡量:
-
平均处理时间(Average Processing Time):该指标表示对每张图像进行分割所需的平均处理时间。它是根据一批图像的总处理时间除以图像数量得出的。较低的平均处理时间表示算法具有较高的实时性能。
-
帧率(Frame Rate):帧率表示每秒处理的图像帧数。它是通过将处理的图像数量除以总处理时间得出的。较高的帧率表示算法能够以更快的速度处理图像,具有更好的实时性能。
-
延迟(Latency):延迟是指从输入图像到输出分割结果可用之间的时间间隔。它表示算法的响应速度,即算法对输入的实时性能。较低的延迟表示算法能够快速生成分割结果,具有更好的实时性能。
-
吞吐量(Throughput):吞吐量表示单位时间内处理的图像数量。它是根据一定时间内处理的图像数量除以该时间间隔得出的。较高的吞吐量表示算法能够同时处理多个图像,具有更好的实时性能。
-
GPU利用率(GPU Utilization):如果使用GPU加速进行图像分割,可以考虑GPU的利用率。GPU利用率表示GPU在执行分割任务时的工作量占总工作量的比例。较高的GPU利用率表示算法能够充分利用GPU的计算资源,提高实时性能。
这些指标可以通过在实际环境中进行性能测试和基准测试来评估图像分割算法的实时性能。通过收集处理时间、帧率、延迟、吞吐量等数据,并与应用的实时要求进行比较,可以确定算法在实时应用中的适用性和性能表现。
4 代码实例:基于U-Net的实时图像分割
import tensorflow as tf
from tensorflow.keras.models import Model
from tensorflow.keras.layers import Input, Conv2D, MaxPooling2D, Dropout, concatenate, Conv2DTranspose
# 定义U-Net模型
def unet(input_shape, num_classes):
inputs = Input(input_shape)
# 编码器部分
conv1 = Conv2D(64, 3, activation='relu', padding='same')(inputs)
conv1 = Conv2D(64, 3, activation='relu', padding='same')(conv1)
pool1 = MaxPooling2D(pool_size=(2, 2))(conv1)
conv2 = Conv2D(128, 3, activation='relu', padding='same')(pool1)
conv2 = Conv2D(128, 3, activation='relu', padding='same')(conv2)
pool2 = MaxPooling2D(pool_size=(2, 2))(conv2)
# 解码器部分
conv3 = Conv2D(256, 3, activation='relu', padding='same')(pool2)
conv3 = Conv2D(256, 3, activation='relu', padding='same')(conv3)
up1 = Conv2DTranspose(128, 2, strides=(2, 2), padding='same')(conv3)
up1 = concatenate([up1, conv2], axis=3)
conv4 = Conv2D(128, 3, activation='relu', padding='same')(up1)
conv4 = Conv2D(128, 3, activation='relu', padding='same')(conv4)
up2 = Conv2DTranspose(64, 2, strides=(2, 2), padding='same')(conv4)
up2 = concatenate([up2, conv1], axis=3)
# 输出层
conv5 = Conv2D(64, 3, activation='relu', padding='same')(up2)
conv5 = Conv2D(64, 3, activation='relu', padding='same')(conv5)
outputs = Conv2D(num_classes, 1, activation='softmax')(conv5)
model = Model(inputs=inputs, outputs=outputs)
return model
# 定义输入形状和类别数
input_shape = (256, 256, 3)
num_classes = 2
# 创建U-Net模型
model = unet(input_shape, num_classes)
# 编译模型
model.compile(optimizer='adam', loss='binary_crossentropy', metrics=['accuracy'])
# 训练模型
model.fit(x_train, y_train, batch_size=32, epochs=10, validation_data=(x_val, y_val))
# 对测试数据进行预测
predictions = model.predict(x_test)
# 在测试数据上评估模型
test_loss, test_accuracy = model.evaluate(x_test, y_test)
print('Test Loss:', test_loss)
print('Test Accuracy:', test_accuracy)示意图
+-------------------+
| Input |
| (256, 256, 3) |
+-------------------+
|
v
+---------+
| Conv2D |
| 64 |
+---------+
|
v
+---------+
| Conv2D |
| 64 |
+---------+
|
v
+-----------------+
| MaxPooling2D |
| (2, 2) |
+-----------------+
|
v
+---------+
| Conv2D |
| 128 |
+---------+
|
v
+---------+
| Conv2D |
| 128 |
+---------+
|
v
+-----------------+
| MaxPooling2D |
| (2, 2) |
+-----------------+
|
v
+---------+
| Conv2D |
| 256 |
+---------+
|
v
+---------+
| Conv2D |
| 256 |
+---------+
|
v
+-----------------------+
| Conv2DTranspose |
| 128, strides=(2,2) |
+-----------------------+
|
v
+-----------------------+
| Concatenate(axis=3) |
+-----------------------+
|
v
+---------+
| Conv2D |
| 128 |
+---------+
|
v
+---------+
| Conv2D |
| 128 |
+---------+
|
v
+-----------------------+
| Conv2DTranspose |
| 64, strides=(2,2) |
+-----------------------+
|
v
+-----------------------+
| Concatenate(axis=3) |
+-----------------------+
|
v
+---------+
| Conv2D |
| 64 |
+---------+
|
v
+---------+
| Conv2D |
| 64 |
+---------+
|
v
+----------------------+
| Conv2D |
| num_classes, 1 |
| activation='softmax'|
+----------------------+
|
v
+-------------------+
| Output |
| (256, 256, 2) |
+-------------------+
4.1 环境配置和依赖项安装
在开始实现基于U-Net的实时图像分割之前,需要进行环境配置和安装相关依赖项。以下是一般的环境配置步骤:
-
安装Python:确保你的系统已经安装了Python。你可以从Python官方网站(https://www.python.org/)
-
安装TensorFlow:TensorFlow是一个流行的深度学习框架,提供了丰富的工具和函数来构建和训练模型。你可以使用以下命令安装TensorFlow:
pip install tensorflow注意,你也可以根据自己的硬件和系统环境选择安装TensorFlow的GPU版本,以充分利用GPU加速。
-
安装其他依赖项:除了TensorFlow,你可能还需要安装其他一些常用的Python库,如NumPy、Matplotlib等。你可以使用以下命令来安装这些库:
pip install numpy matplotlib -
配置开发环境:选择一个合适的集成开发环境(IDE)或文本编辑器,例如PyCharm、Visual Studio Code等,以便编写和运行Python代码。
-
数据准备:准备用于图像分割的训练数据和测试数据。确保你有足够的图像数据和相应的标签数据用于模型训练和评估。
4.2 数据集准备和预处理
数据集的准备和预处理在图像分割任务中至关重要。下面是一些常见的数据集准备和预处理步骤:
-
数据收集:收集与你的图像分割任务相关的图像数据和相应的标签数据。确保数据集中包含足够的样本和正确的标注。
-
数据划分:将数据集划分为训练集、验证集和测试集。训练集用于模型的训练,验证集用于调整超参数和评估模型性能,测试集用于最终的模型评估。
-
数据预处理:对图像和标签数据进行预处理,以提高模型的训练效果。常见的预处理步骤包括:
- 图像归一化:将图像像素值缩放到固定的范围,例如[0, 1]或[-1, 1]。可以通过除以255(对应图像的最大像素值)来实现归一化。
- 图像调整大小:将所有图像调整为相同的尺寸,以便输入模型。可以使用图像处理库(如OpenCV)或深度学习框架的内置函数来调整大小。
- 标签转换:将标签数据转换为模型所需的格式。通常,标签数据是像素级别的掩膜图像,其中每个像素指示对应像素所属的类别。可以将标签数据进行独热编码或使用整数编码,以便与模型输出相匹配。
-
数据增强:对训练集数据进行数据增强操作,以扩充样本数量和增加数据的多样性。常见的数据增强技术包括随机裁剪、翻转、旋转、缩放等。可以使用图像处理库或深度学习框架的数据增强模块来实现。
-
批量处理:将数据集划分为批量进行训练。批量处理可以提高训练效率并更好地利用硬件资源。可以使用深度学习框架的批量处理函数来实现。
-
数据加载和迭代:使用适当的数据加载器和迭代器来加载和处理数据集。深度学习框架通常提供了用于数据加载和迭代的工具,例如
ImageDataGenerator类或tf.data.Dataset模块。
通过适当的数据集准备和预处理,可以为图像分割任务提供高质量的训练数据,并提升模型的性能和泛化能力。根据具体的任务需求和数据特点,可能需要进行额外的数据预处理步骤或采用特定的数据增强技术。
4.3 模型的训练和评估
模型的训练和评估是图像分割任务中的关键步骤。下面是一般的模型训练和评估流程:
-
数据准备:首先,将数据集划分为训练集、验证集和测试集。确保数据集的格式与所选的深度学习框架兼容,并进行必要的数据预处理,如图像归一化、调整大小和标签转换。
-
模型构建:使用选择的深度学习框架构建图像分割模型。常见的模型包括U-Net、FCN(全卷积网络)、DeepLab等。根据任务的复杂性和数据集的规模,可以选择预训练模型并进行微调,或从头开始训练一个新模型。
-
模型编译:配置模型的优化器、损失函数和评估指标。对于图像分割任务,常用的优化器包括Adam、SGD等,损失函数可以选择交叉熵损失函数或Dice系数损失函数,评估指标可以选择准确率、IoU(交并比)等。
-
模型训练:使用训练集进行模型的训练。设置合适的批量大小(batch size)和训练轮数(epochs),并监控训练过程中的损失值和指标变化。可以使用深度学习框架提供的fit()函数或自定义训练循环来进行训练。
-
模型验证:使用验证集评估模型的性能。在每个训练轮次结束后,计算模型在验证集上的损失值和指标,并观察其变化趋势。这有助于判断模型是否过拟合或欠拟合,并根据需要进行调整。
-
模型优化:根据验证集的结果,对模型进行优化和调整。可以尝试调整超参数,如学习率、正则化参数等,或使用正则化技术,如dropout、批量归一化等,以改善模型的性能。
-
模型评估:在训练完成后,使用测试集评估最终的模型性能。计算模型在测试集上的损失值和指标,并根据实际需求进行结果分析和解释。
-
进一步改进:根据评估结果和应用需求,可能需要进一步改进模型或数据集。这包括增加训练数据量、调整模型架构、采用更复杂的损失函数或增加数据增强等方法。
通过反复迭代训练和评估的过程,不断优化模型的性能和泛化能力,从而实现高质量的图像分割效果。根据具体的任务和数据特点,可能需要采用不同的训练和评估策略,并结合领域专业知识进行模型调整和改进。
训练阶段
# 导入所需库和模块
import torch
import torch.nn as nn
import torch.optim as optim
from torch.utils.data import DataLoader
from torchvision.transforms import ToTensor
# 定义U-Net模型
class UNet(nn.Module):
def __init__(self):
super(UNet, self).__init__()
# 模型结构定义
def forward(self, x):
# 前向传播逻辑
# 定义损失函数
criterion = nn.CrossEntropyLoss()
# 定义训练参数
learning_rate = 0.001
num_epochs = 10
batch_size = 8
# 准备训练数据集和数据加载器
train_dataset = ...
train_dataloader = DataLoader(train_dataset, batch_size=batch_size, shuffle=True)
# 创建U-Net模型实例
model = UNet()
# 定义优化器
optimizer = optim.Adam(model.parameters(), lr=learning_rate)
# 训练循环
for epoch in range(num_epochs):
running_loss = 0.0
for images, labels in train_dataloader:
# 数据加载和前向传播
images = images.to(device)
labels = labels.to(device)
outputs = model(images)
# 计算损失函数
loss = criterion(outputs, labels)
# 反向传播和优化
optimizer.zero_grad()
loss.backward()
optimizer.step()
running_loss += loss.item()
epoch_loss = running_loss / len(train_dataloader)
print(f"Epoch [{epoch+1}/{num_epochs}], Loss: {epoch_loss:.4f}")
# 保存模型
torch.save(model.state_dict(), "unet_model.pth")评估阶段
# 导入所需库和模块
import torch
import torch.nn as nn
from torch.utils.data import DataLoader
from torchvision.transforms import ToTensor
# 定义U-Net模型
class UNet(nn.Module):
def __init__(self):
super(UNet, self).__init__()
# 模型结构定义
def forward(self, x):
# 前向传播逻辑
# 加载测试数据集
test_dataset = ...
test_dataloader = DataLoader(test_dataset, batch_size=1)
# 创建U-Net模型实例
model = UNet()
# 加载预训练的模型参数
model.load_state_dict(torch.load("unet_model.pth"))
# 设置模型为评估模式
model.eval()
# 进行评估
total_loss = 0.0
with torch.no_grad():
for images, labels in test_dataloader:
# 数据加载和前向传播
images = images.to(device)
labels = labels.to(device)
outputs = model(images)
# 计算损失函数
loss = criterion(outputs, labels)
total_loss += loss.item()
avg_loss = total_loss / len(test_dataloader)
print(f"Average Loss: {avg_loss:.4f}")4.4 实时图像分割的实现
基于U-Net的实时图像分割的实现需要结合图像输入、模型推理和后处理等步骤。
# 导入所需库和模块
import cv2
import torch
import torch.nn as nn
from torchvision.transforms import ToTensor
# 定义U-Net模型
class UNet(nn.Module):
def __init__(self):
super(UNet, self).__init__()
# 模型结构定义
def forward(self, x):
# 前向传播逻辑
# 加载预训练的U-Net模型
model = UNet()
model.load_state_dict(torch.load("unet_model.pth"))
model.eval()
# 定义后处理函数
def post_process(mask):
# 后处理逻辑,如阈值处理、连通域分析等
return processed_mask
# 初始化摄像头
cap = cv2.VideoCapture(0)
while True:
# 读取视频帧
ret, frame = cap.read()
# 图像预处理
frame = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
image = ToTensor()(frame)
image = image.unsqueeze(0)
# 模型推理
with torch.no_grad():
outputs = model(image)
predicted_mask = torch.argmax(outputs, dim=1)
predicted_mask = predicted_mask.squeeze().cpu().numpy()
# 后处理
processed_mask = post_process(predicted_mask)
# 可视化结果
cv2.imshow("Original Image", frame)
cv2.imshow("Segmentation Mask", processed_mask)
# 退出条件
if cv2.waitKey(1) & 0xFF == ord("q"):
break
# 释放资源
cap.release()
cv2.destroyAllWindows()
通过使用OpenCV库捕获实时视频流,并将每一帧图像输入到已经训练好的U-Net模型中进行推理。推理得到的分割结果经过后处理函数进行处理,然后将原始图像和分割结果在窗口中展示出来。按下键盘上的"q"键可以退出程序。
总结
在本文中,我们深入探讨了基于U-Net的实时图像分割技术。我们首先介绍了图像分割的概念和不同的分割方法,包括像素级图像分割和基于区域的图像分割。然后,我们讨论了深度学习在图像分割中的作用,并引入了U-Net模型的网络结构和损失函数的选择。
我们讨论了数据集的准备和预处理步骤,包括数据集的格式转换、图像归一化和标签转换等。然后,我们探讨了图像分割的加速方法,如并行计算和模型压缩等,以提高实时性能。我们还介绍了模型部署和优化的相关技术,如模型压缩和量化。
最后,我们提供了一个基于U-Net的实时图像分割的代码示例,涵盖了模型的训练和评估,以及实时图像分割的实现。这个示例代码可以作为实际应用的起点,但需要根据具体需求进行修改和优化。
基于U-Net的实时图像分割技术为许多计算机视觉任务提供了强大的工具。通过深入理解和灵活应用这些技术,我们能够实现高质量的图像分割,并在实时场景中取得优异的性能。