0 说明
此文章是为了记录学习FOC的过程,包括FOC原理及软硬件实现等内容。看了很多大佬的文章,写的不错,但是有些用词还是没让我觉得通俗易懂,所以自己想来写一个自己方便理解的,写的能让别人看懂了,说明我自己也就学会了。
在学习过程中参考了很多大佬的文章等内容,会加以标注的。如果各位客观发现文中有错误,还望指正。理性探讨。
参考资料:
https://blog.csdn.net/jdhfusk/article/details/120395938 (有些图不错)
https://zhuanlan.zhihu.com/p/147659820 (大佬文章,内容很干很长)
https://blog.csdn.net/weixin_43229030/article/details/115407480 (用了一张图)
https://zhuanlan.zhihu.com/p/56529497 (解释一个数字的问题,还是没看懂。。。)
1. 无刷电机
这里不介绍无刷电机与有刷电机的区别,直接说无刷电机。
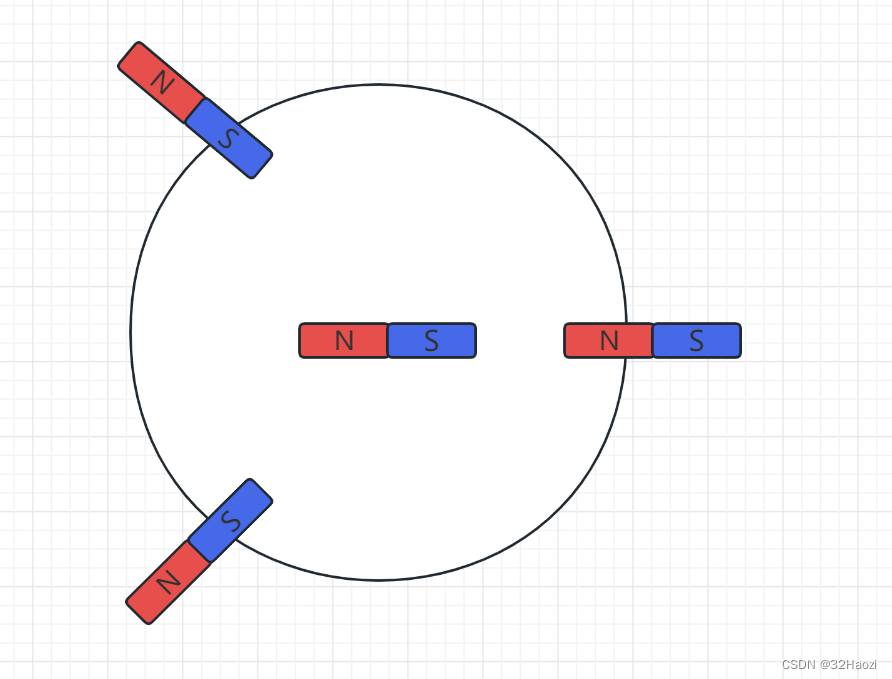
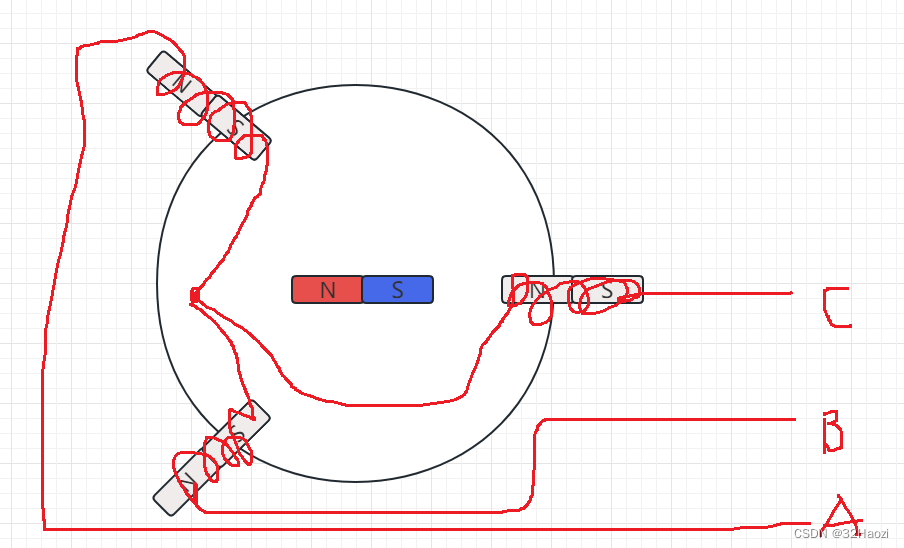
无刷电机外露的有三条线,分别对应到电机定子的三个线圈(实际上,大多数电机都不止有三个线圈)。

中间的转子可以视作是一个磁铁(实际上比这个略微麻烦点,说算法的时候说)。而定子是三个线圈,线圈上面缠绕了三个电机线,以星形连接,在外面引出。当有电流通过线圈时,线圈也就可以看作是磁铁了。
2. 六步换向法
最简单的转子转动的方法如下图所示。
第一步:假如某时刻,电机转子位置,如左图所示。电流从A相流入,B相流出(记作:电流AB),则如左图所示,线圈被等效为两个磁铁。此时,转子收到两个线圈的合力,会逆时针旋转至右图的位置,然后停止。
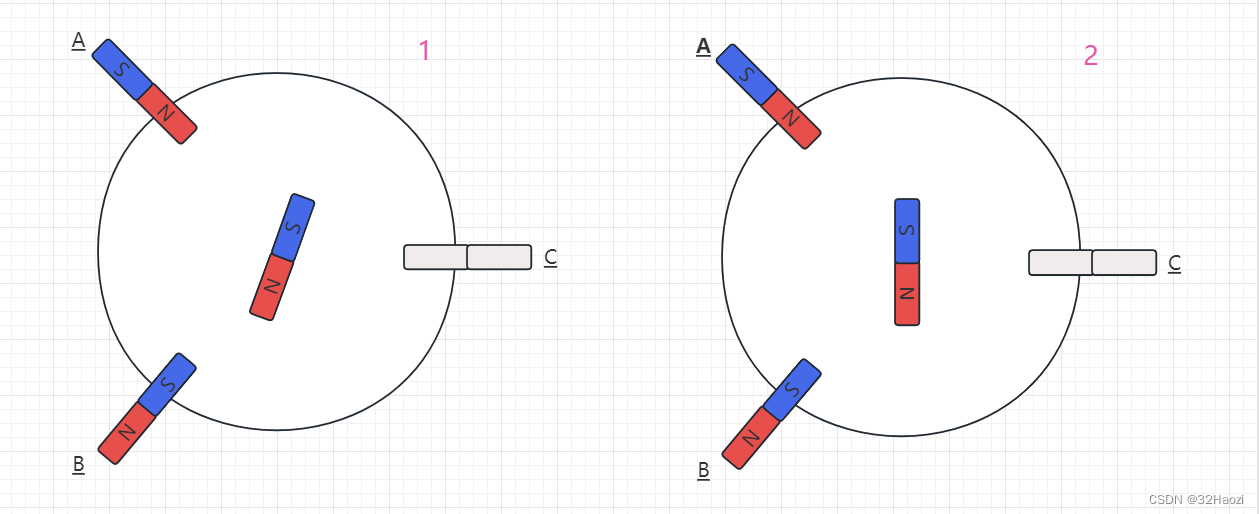
第二步:此时,转换电流,把电流改为从A相流入,C相流出(记作:电流AC),此时,转子收到两个线圈的合力,会逆时针旋转60°至右图的位置,然后停止。
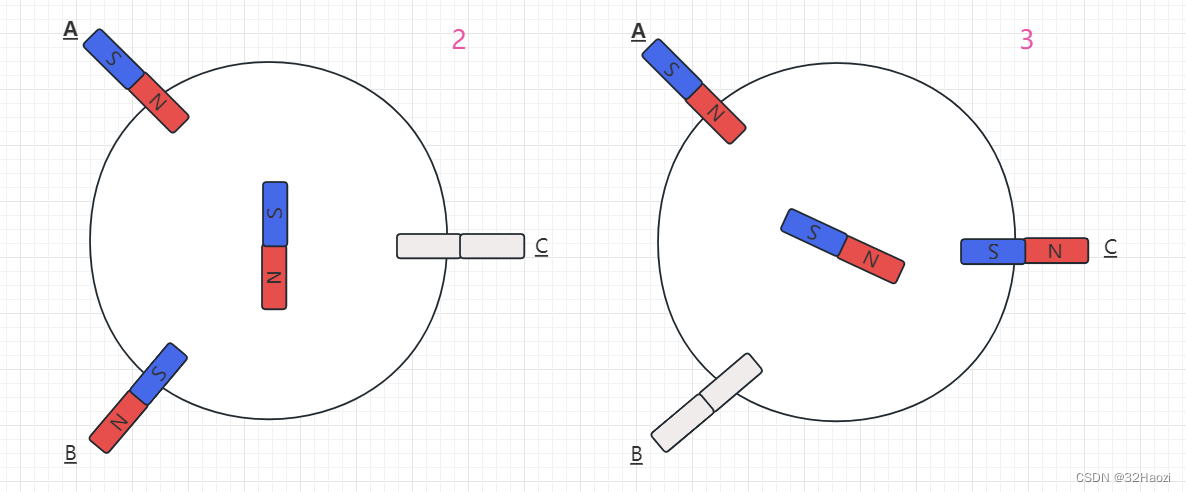
第三步:此时,转换电流,把电流改为从B相流入,C相流出(记作:电流BC),此时,转子收到两个线圈的合力,会逆时针旋转60°至右图的位置,然后停止。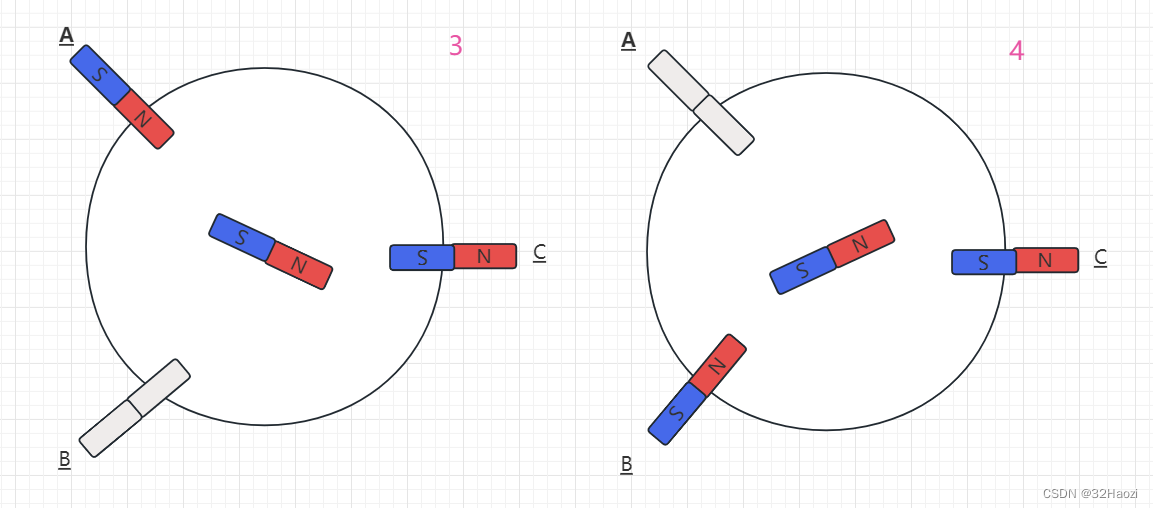
第四步:此时,转换电流,把电流改为从B相流入,A相流出(记作:电流BA),此时,转子收到两个线圈的合力,会逆时针旋转60°至右图的位置,然后停止。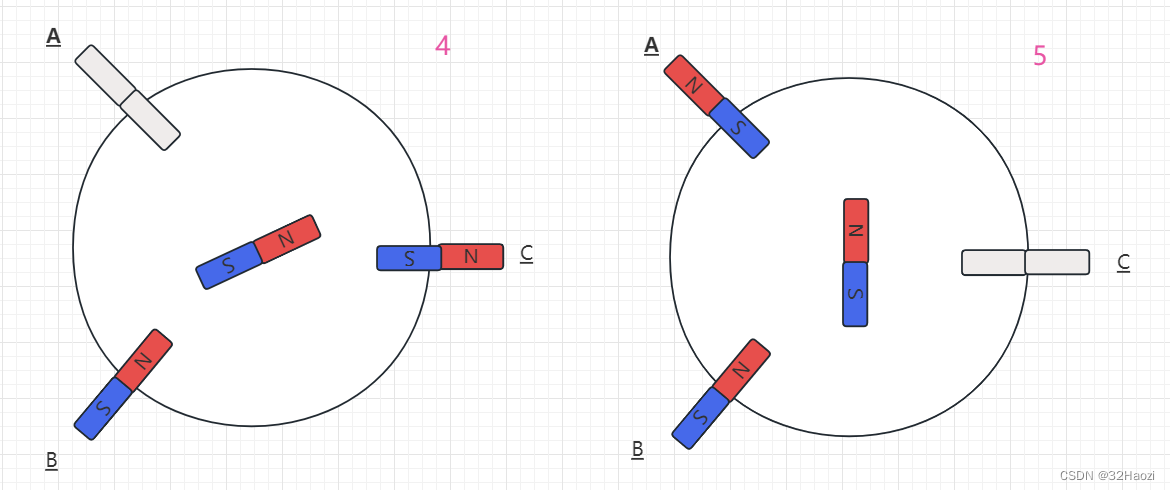
第五步:此时,转换电流,把电流改为从C相流入,A相流出(记作:电流CA),此时,转子收到两个线圈的合力,会逆时针旋转60°至右图的位置,然后停止。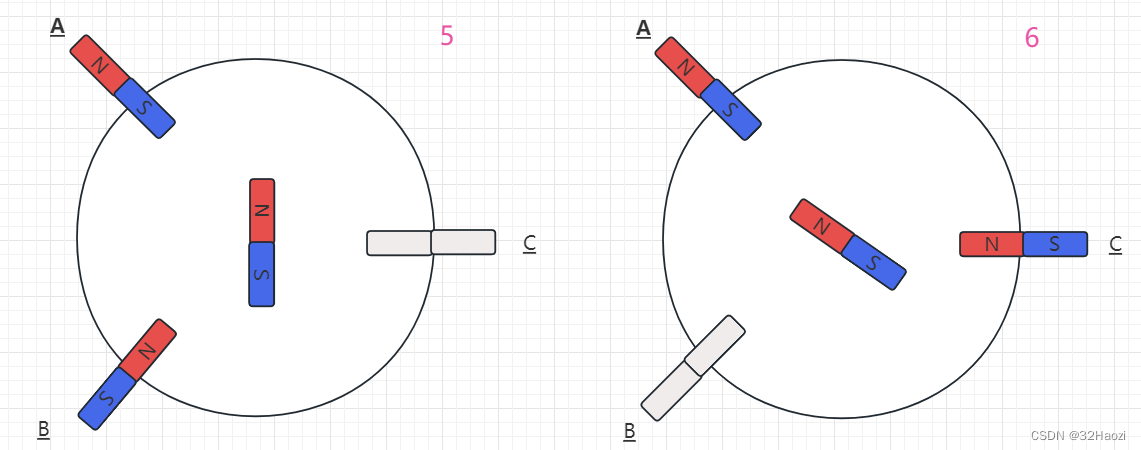
第六步:此时,转换电流,把电流改为从C相流入,B相流出(记作:电流CB),此时,转子收到两个线圈的合力,会逆时针旋转60°至右图的位置,然后停止。
此时,又回到了初始的位置。
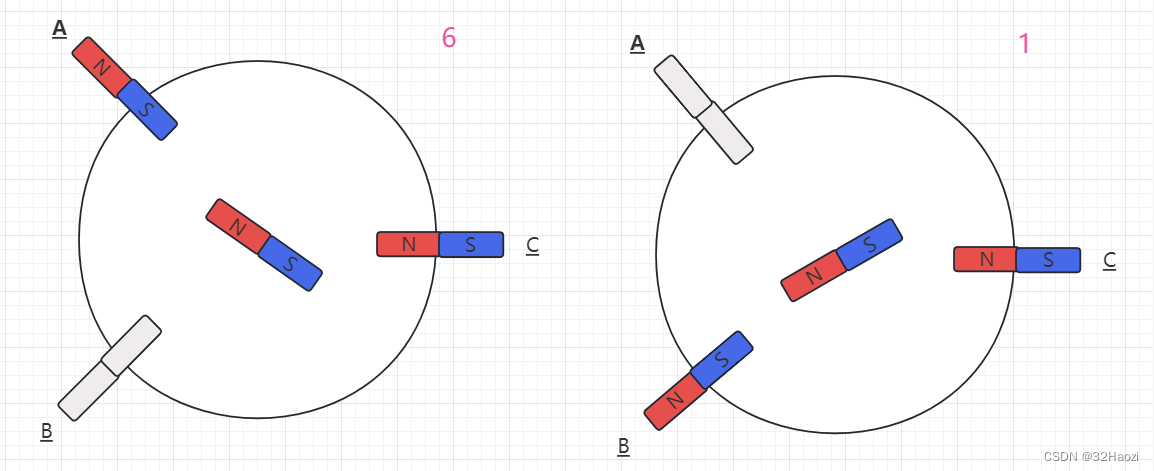
经过上述步骤可以发现,如果想让电机逆时针转动,只需要按照顺序不断调整电流方向就可以了。
逆时针转动:AB => AC => BC => BA => CA => CB => AB
顺时针转动:AB => CB => CA => BA => BC => AC => AB
这就是最简单的六步换向法。
每次换向可以使得转子转动60°,通过六次换向使得转子转动一周。
不断循环,便可以使得转子不断转动。

3. 驱动电路设计
电机内部采用星形连接,每次更换两条通电的电路(第三条线暂且悬空不用管),可以产生一定的磁场,吸引转子达到一个固定的角度后停下来。图中画的转子的位置就是不会再发生转动了的位置。可以看出,定子刚好逆时针转了一圈。循环往复就能让转子不停的转动了。这个电压方向不断变化的动作就是换相。这个换相动作就是由控制器完成的,控制器按照一定的频率换相,就能控制电机的转动了。
注意:转速与换相频率无关!!!无关!!!无关!!! 换相是个被动的动作,当达到一定的角度是需要你进行换相。而不是你随意换相了他就能达到某一个角度。越大的电压能让电机转子转的更快,转得越快就需要越快的换相频率。
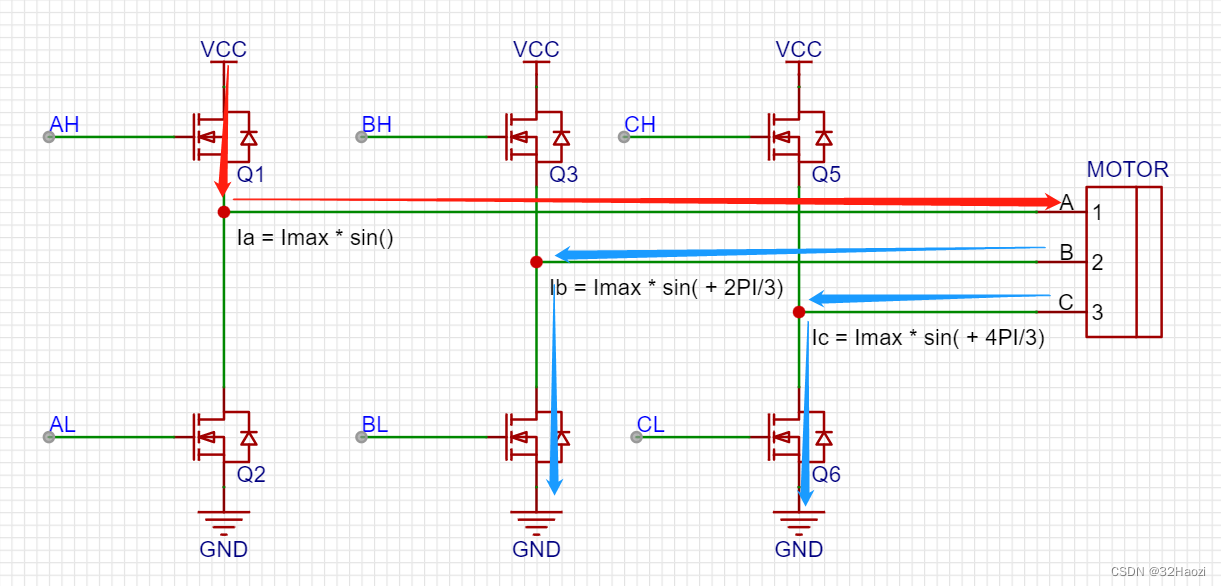
从上面的分析我们可以看出来,对于电机三相的每根线来说,电流都有两种情况:流入和流出。如下图所示。
而我们常用的直流电源是无法做到这一点的。因此我们需要一个电路,对电流进行转换。
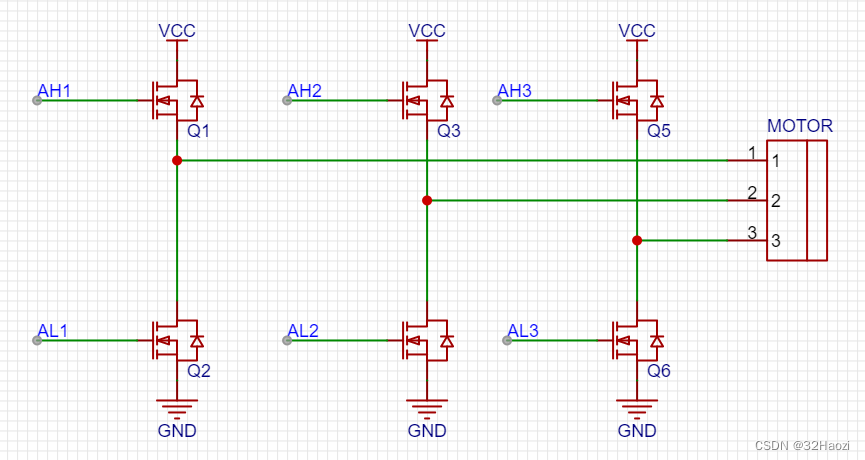
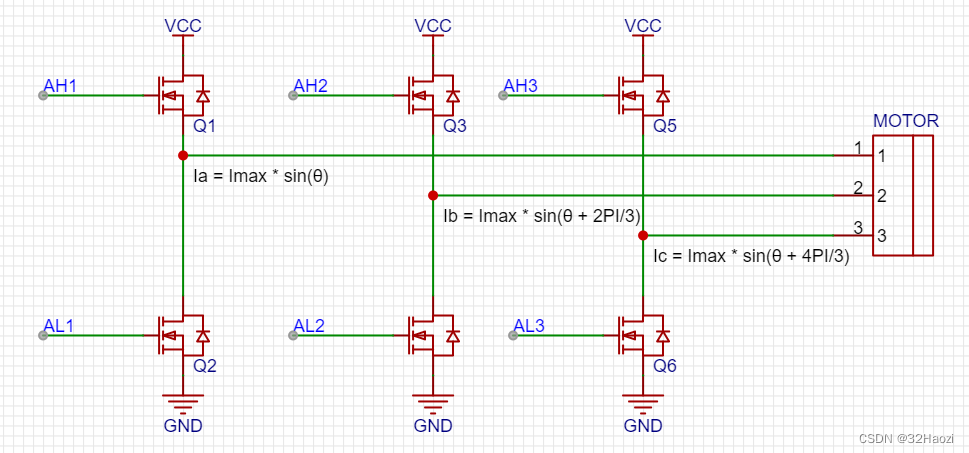
如下图所示,当AH1为高电平、AL1为地点平时,上侧MOS打开、下侧MOS管断开,电流从上往下流,然后流入电机。
而AH3为低电平、AL3为高点平时,上侧MOS断开、下侧MOS管打开,电流从上往下流,从电机中流出,最后流到电源负极。
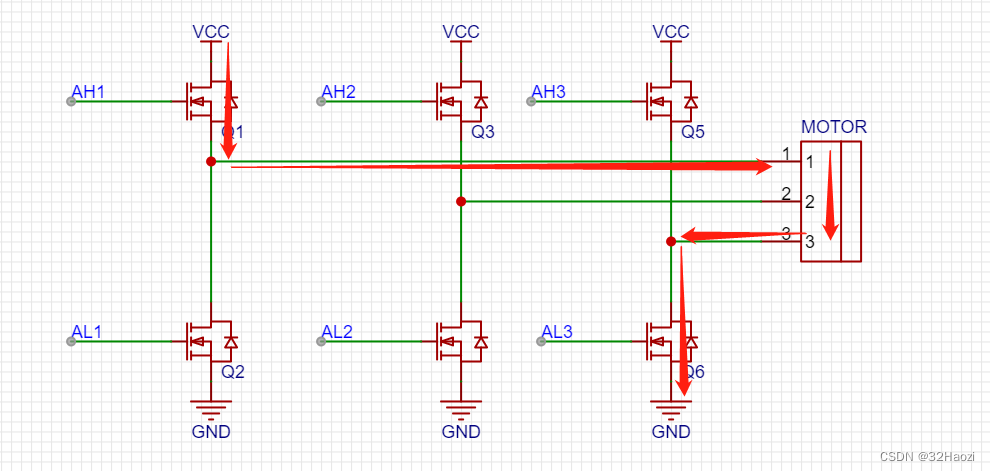
在上图中,第二相是没有用到的,但是实际上,这也是可以同时用到的。而且并不影响上面六步换向法的分析结果。
然后分析一下,电路的导通情况。
假设:
- 上桥臂导通、下桥臂断开 记为:1
- 上桥臂断开、下桥臂导通 记为:0
那么一共有八种情况。分别为:000、001、010、011、100、101、110、111.
注意,01不可能同时存在,即某一个相不可能上下桥臂都打开,否则,这电源不是被短路了吗?
如果上下桥臂都断开,那就不起作用了,多一个有什么不好的呢。
4. 电动机与发电机
为了明白如何控制发动机,我们先复习一下发电机。
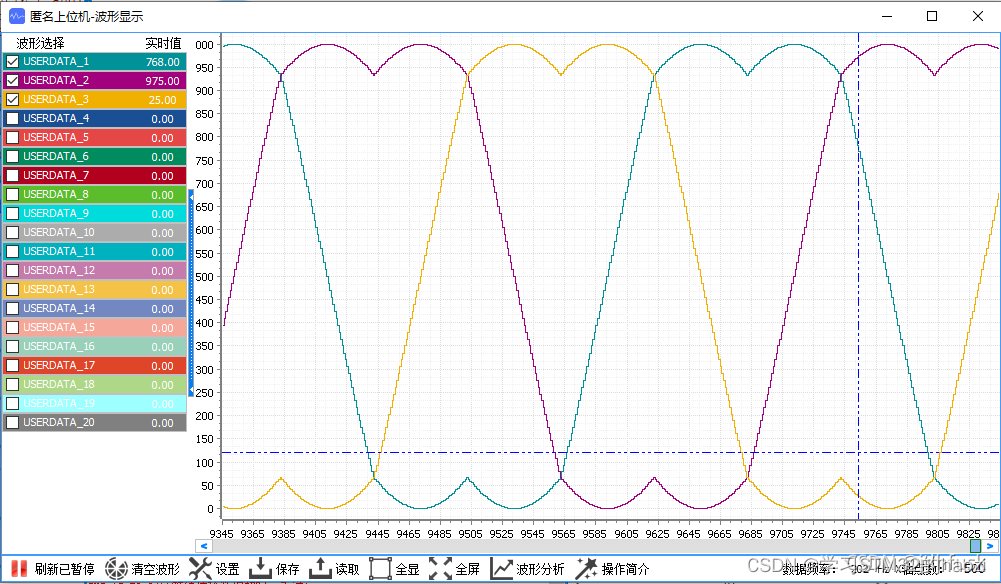
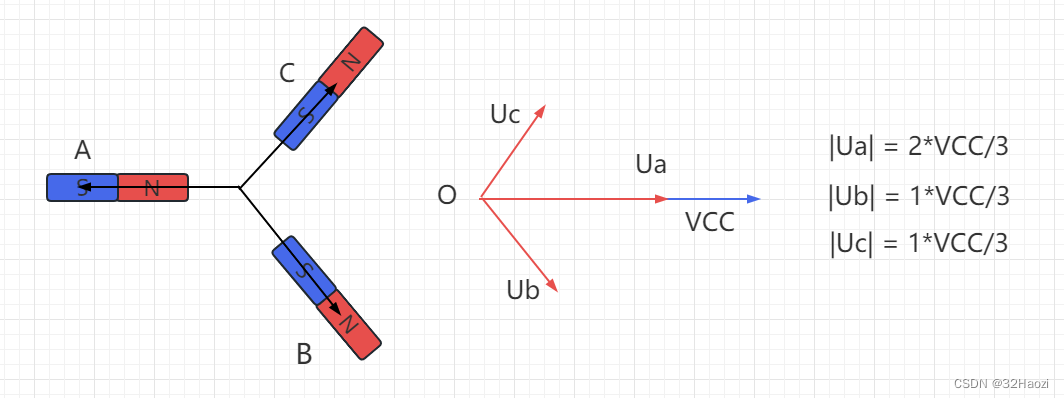
对于三项交流发电机,使其匀速转动之后,其产生的三项电电压变化如下图所示。
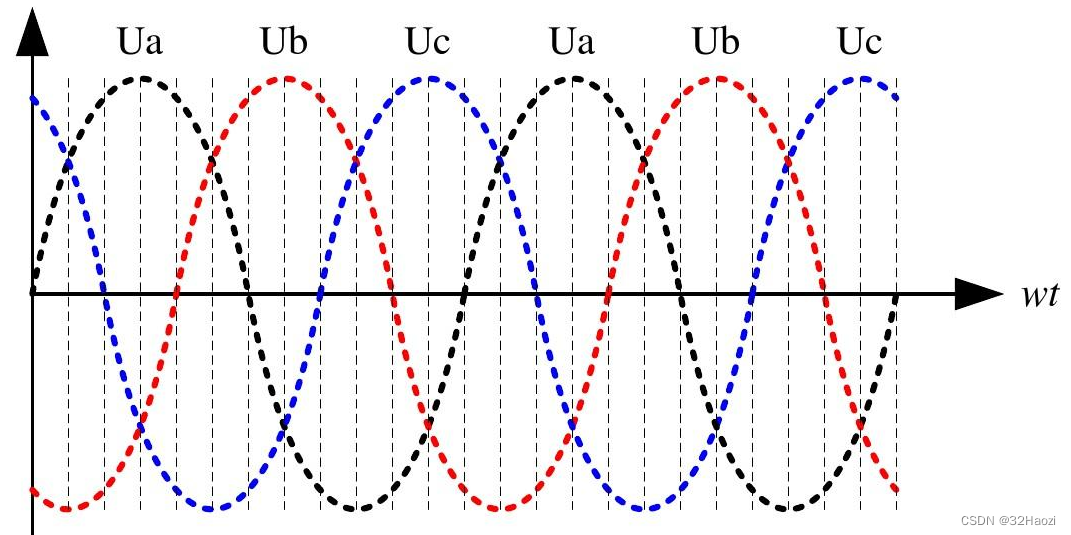
具体到我们生活中,发电机的电压曲线也是这样的,峰值为380V,有效值为 380V / 1.732 = 220V.
那么,这里的发电机 跟 电动机 有什么区别吗?
答:原理上没有什么区别。只不过一个是你拉着它转,他给你电。另一个是你给他电,它拉着你转。
因此,得出结论,我们给电机这样的三项交流电,那电机就能匀速转动了。
反电动势:电机和发电机其实可以认为是同一个东西。当电机通电旋转的时候,它实际上是一边被磁场力拖着转动,同时也因为它在转动而在发电。发的这个电就是反电动势。理想空载的情况下,电机发电的电压和加在电机线圈上的电压是相等的,也就是说加在电机上的电压恰好被反电动势给抵消了。
5. 沙雕控制方法
以上面的结果为分析情况,先以电机匀速转动为目标,来做个案例看看。
如果想让电机匀速转动,只需要控制电机三相上的电流按照图上标注的大小转动就可以了。其中θ是转子的实时角度。
因此,我们就可以获得如下的控制框图。
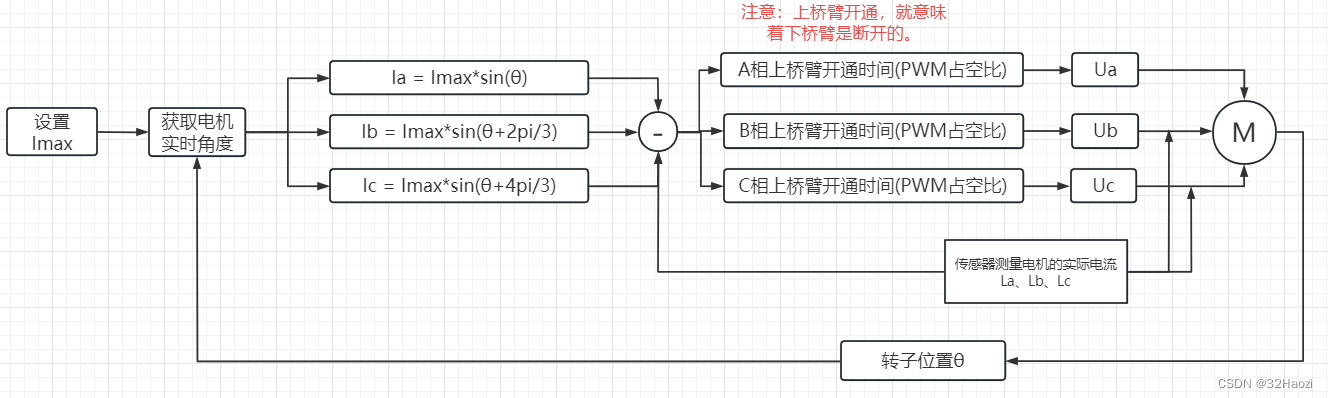
设定的三个相的电流 是需要随时根据转子的角度进行调整的,然后和实际的电流进行对比,根据对比结果调整占空比的大小,进而控制电压大小,最后实现控制电流大小的目的。
而电机转动的速度是由Imax决定的,因为电流越大 => 线圈产生的磁场越强 => 对转子的拉力越大 => 转动的越快。
而转的越快,也就需要更快的电流更新速度。
因此,我们发现,其实上图就是电机控制的力矩环,而速度环,可以通过计算需求速度与实际速度的差值,并将这个差值设置为Imax即可。
需要明确的是,真正控制电机力矩的是电流,而我们控制电流的方法是 控制电压大小来调整电流。
另外,上图中省略了PID的部分,实际上电流反馈做差之后,是需要利用PID进行调整的。这里只是个表示,不影响分析。
根据上述控制过程可以发现,在这个过程中我们需要控制三个量,而且是不断变化的,及其不方便,因此,我们需要一种简单的控制方法。
6. FOC控制
接下来就是我们的正题:FOC控制。
简单来说,我们的目的就是:避免直接控制上面提到的三个量,尽可能的对其进行简化。
以下PID算法默认都会。
先放个FOC控制的流程图,然后慢慢解释:
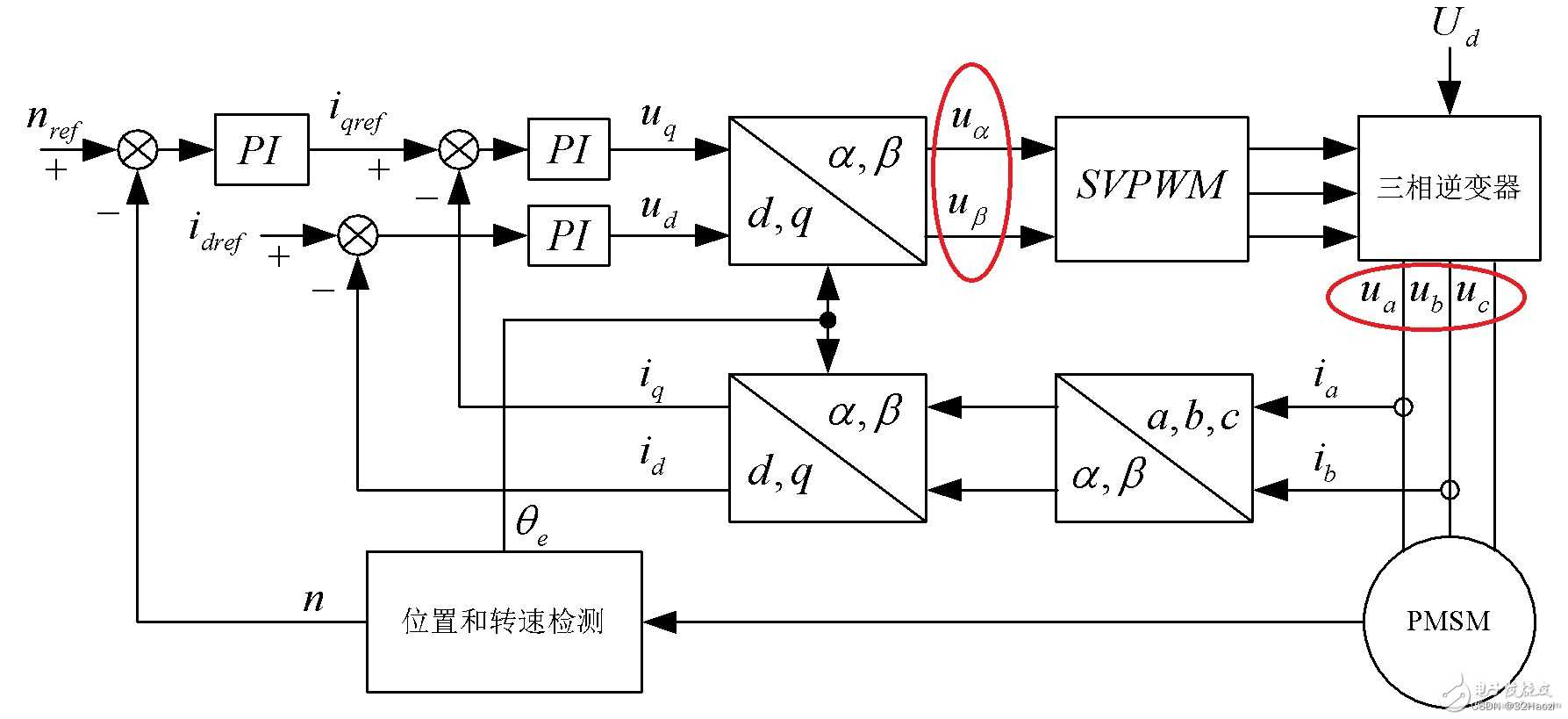
上图中的控制流程为:
- 计算电机三条电机线上的电流:
Ia、Ib、Ic - 对电流
Ia、Ib、Ic进行Clark变换得到Iα、Iβ - 对
Iα、Iβ进行Park变换得到Iq、Id - 将
Iq、Id与设定的Iq_ref、Id_ref计算误差 - 将计算的误差用PID控制器(上图中只有PI控制)计算控制电压
Uq、Ud - 对
Uq、Ud进行反Park变换得到Uα、Uβ - 用
Uα、Uβ合成空间矢量,输入SVPWM输出编码值(前文说的8种情况) - 按照编码值赋值给MOS管驱动电机
- 循环重复以上步骤
然后解释以下上述流程:
在解释开始之前,一定要牢记一点:下面说的电流矢量或者电压矢量就可以直接理解为力矩矢量,这之间只需要单位变换,其实都是一样的。
6.1 电流检测
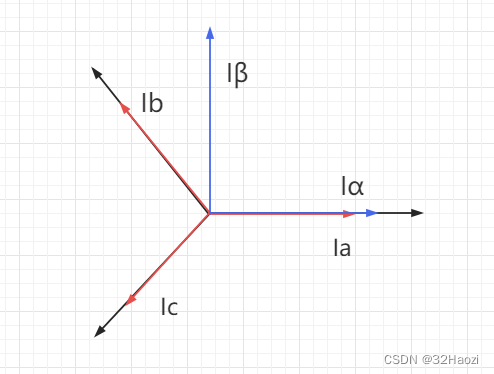
我们上面电动机和发电机的沙雕控制案例说明,我们需要控制电机三个相的电流,使得三个相的电流和矢量沿着我们预期的方向。如图,将Ia、Ib、Ic作为基向量,我们控制其大小,就可以调整磁场合力的方向和大小,实现控制转子旋转的目的。
因此,我们需要对实际电路中三个相上的电流进行检测,以便于进行反馈控制。
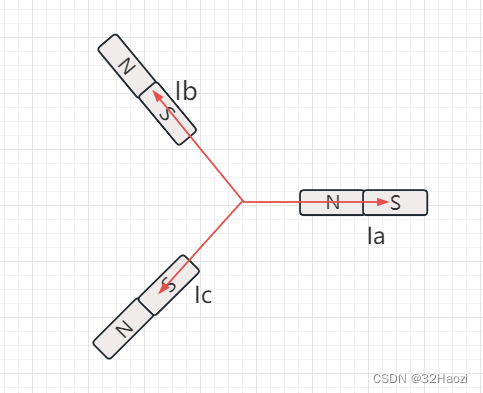
实际上,上图中我们只检测了两个相上的电流。因为根据基尔霍夫电流定律,电流之和等于0,可以轻松求得第三相的电流。在硬件上还可以少一个检测部分的成本。
6.2 Clark变换
在得到检测的电流Ia + Ib + Ic之后,我们知道电流I = Ia + Ib + Ic。
存在两个问题:
- 而我们上面的分析得知,
Ia、Ib、Ic三个量是需要根据角度而变化的,如果直接进行反馈(就是上面沙雕控制算法的意思),这个量还是需要算的,而我们不想控制这种一直变换的量。 - 我们知道了
Ia、Ib、Ic,但仍然不好说清楚和矢量到底指向哪个方向,因为这三个向量不是正交的。而我们习惯上使用两个垂直的量作为基向量进行描述。
为此,我们可以使用Clark变换进行解决。
克拉克变换(Clark)基本形式如下:
I α = I a − cos ( 2 Π 3 ) I b − cos ( 2 Π 3 ) I c I β = sin ( 2 Π 3 ) I b − sin ( 2 Π 3 ) I c I_\alpha = I_a - \cos(\frac{2\Pi}{3})I_b - \cos(\frac{2\Pi}{3})I_c \\ I_\beta = \sin(\frac{2\Pi}{3})I_b - \sin(\frac{2\Pi}{3})I_c \\ Iα=Ia−cos(32Π)Ib−cos(32Π)IcIβ=sin(32Π)Ib−sin(32Π)Ic
写成矩阵形式如下(这带的公式编辑器真难用):

注意,此处增加了一个系数k,在此基础上,为了后面好写,把这个系数矩阵记为C(Clark),我们就可以有如下变换:
I = [Iα、Iβ].T = k*C*[Ia、Ib、Ic].T
这样只要带入我们测得的Ia、Ib、Ic,我们就可以用Iα、Iβ来表示了。如下图所示。
然后来解释一下上面的那个k,公式中的k一般有三种取值,分别为k=1、k=2/3、k=根号下三分之二。分别表示Clark变换的基本形式、等幅值形式、等功率形式。
这里主要解释前两个。
我们任意带入一个数进去转换一下试试看,比如Ia=-1、Ib=1/2、Ic=1/2(即电流从A相流入,BC相流出)
这三个量表示的是电流,任意带进去的数一定要满足基尔霍夫电流定律,即
Ia + Ib + Ic矢量和等于0。

可以看到,结果中,当k=1时,Iα和原始的Ia并不相等,相差了2/3倍。
再结合Ia + Ib + Ic = 0,可以简化我们的Clark变化结果。
I α = 3 2 I a I β = 3 2 ( 2 I b + I a ) I_\alpha = \frac{3}{2}I_a\\ I_\beta = \frac{\sqrt 3}{2}(2I_b+I_a) Iα=23IaIβ=23(2Ib+Ia)
而Clark变换的等幅值形式,即当k=2/3时,带入上述公式:
I α = I a I β = 1 3 ( 2 I b + I a ) I_\alpha = I_a\\ I_\beta = \frac{1}{\sqrt 3}(2I_b+I_a) Iα=IaIβ=31(2Ib+Ia)
可以发现,Iα=Ia可以一直成立,更加简化了我们的变化结果。
可以看出,我们只需要两路电流就可以计算了,这也是为什么最上面的电路图中只有两路电流检测了。
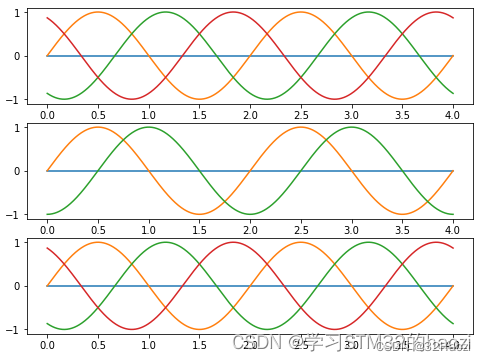
这样我么就减少了一个被控制的量,而且方便描述了。但是如果按照Ia、Ib、Ic的正弦波变化规律,并把它带入到Iα、Iβ中可以发现,其实Iα、Iβ还是两个一直变化的量,还是正弦波。
如下图所示。从上到下,是原始数据、Clark变换后的数据、再反变化的数据。可以看出,经过变换后的数其实还是正弦波。也就是第一个问题仍然存在。
6.3 Park变换
在经过上面的变换后,假设某时刻,转子的位置与α轴(x轴)的夹角为θ。
转子受到的力可以分解为两个方向,一个是沿着转子旋转切线方向的Iq向量、另一个是沿着半径向外的Id分量。
显然,Id分量对于电机的旋转是没有什么作用的,因此实际上我们也不期望他有值,恒等于0是最好的了。
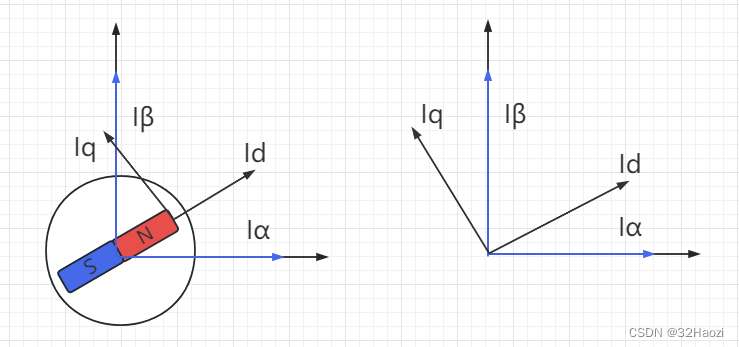
那怎么样用Iα、Iβ来表示我们期望的Iq、Id呢,那就是Park变换。
我们把坐标轴旋转θ度。帕克(Park)变换公式如下:
I d = cos ( θ ) I α − sin ( θ ) ) I β I q = − sin ( θ ) I α + cos ( θ ) I β I_d = \cos(\theta)I_\alpha - \sin(\theta))I_\beta \\ I_q = -\sin(\theta)I_\alpha + \cos(\theta)I_\beta \\ Id=cos(θ)Iα−sin(θ))IβIq=−sin(θ)Iα+cos(θ)Iβ
写成矩阵形式如下:

在此基础上,为了后面好写,把这个系数矩阵记为P(Park),我们就可以有如下变换:
I = [Iq、Id].T = P*[Iα、Iβ].T = P*C*[Ia、Ib、Ic].T
即:

此时,如果将Ia、Ib、Ic最开始分析的正弦波带入上面的公式,就会发现,Iq、Id其实是两个常量。
Iq=1、Id=0
得到上面这个结论,其实就已经理解了大部分的FOC算法了。
因为,我们发现,把三个正弦波经过两次这样的变换就能得到两个常量,那我们设定两个这样的常量,在赋值给电机电压时,根据电机转子的角度,逆向变换过去,这样不就只需要控制两个常量了吗。
这也就是上面的控制步骤中,第4、5、6步的做法。
- 将
Iq、Id与设定的Iq_ref、Id_ref计算误差 - 将计算的误差用PID控制器(上图中只有PI控制)计算控制电压
Uq、Ud - 对
Uq、Ud进行反Park变换得到Uα、Uβ
注意,经过PID计算后,原有的电流向量变成了电压向量,因为电流是通过电压控制的,我们直接控制不了电流。
PID默认都会。
6.4 SVPWM
上面经过分析:把检测到的电机电流经过一系列变换,得到向量q、d的大小,并且和设定的q=1、d=0比较,然后在经过反变换得到三相应该赋予的电压就可以控制电机转动了。
但是实际上在上面写的步骤中,只用到了反Park变化,而没有反Clark变换,在进行反Park变化之后直接使用了SVPWM模块。因此,来分析一下SVPWM的过程和目的。
空间电压矢量分析
我们需要再次看一下我们电路小节的分析,已经说过,电路根据MOS管的开断,一共有八种合法状态。
分别来看一下这八种状态可以产生的电压矢量方向。
比如状态(1,0,0),MOS管开断情况如下图。
此时,电机三个线圈的磁方向如下图左图所示,而根据电路分压定律,电机三个相的相电压分别为下图右图所示。
如果规定从电机三相中性点向外的向量为正。则Ua为正,Ub为负,Uc为负。则电压和矢量的方向为正、模为VCC。如下图中间图所示。
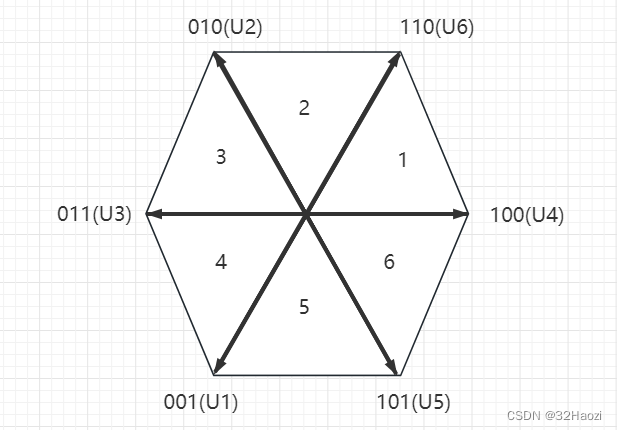
如果我们把八种情况都画出来,驱动电路可以产生的八种电压向量如下图所示(其中000,111两种的和矢量模为0,就是原点的一个点)。得出结论,我们可以产生七种不同方向的力矩(包含0矢量),并且这几个矢量把360度划分为了6份,称之为扇区,分别标号为1-6。
U1-U6的名字是按照对应数字的二进制编码起的。
接下来要做的,是反Park变换得到Uα、Uβ之后,如何用上述的七个矢量产生任意需要的和矢量。
举个栗子:
假设某个时刻,我们需要的电压和矢量角度为θ(0 < θ < 60),Uref为期望的电压和矢量。如下图所示。
想一下:此时转子的角度为多少?
答案:θ-90度。因为我们期望的力矩和,一直是沿着转子旋转的切线方向的。
如果我们需要产生Uref,我们只需要调整U6和U4的大小就可以了。
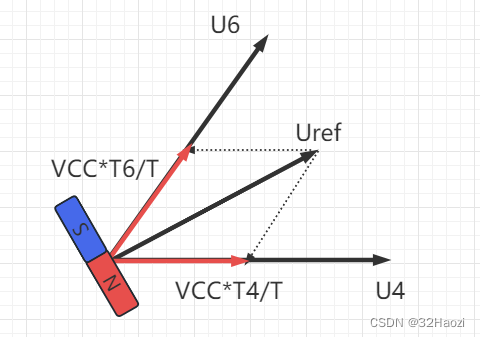
而U6和U4的大小可以通过调节MOS管的开断时间决定。图中,T表示周期长度,T4、T6表示U4、U6的持续时间长度。
显然,T4 + T6 小于等于 1
先明确一点:这里只说U4和U6,他们的最大值Umax为多少?这里按照 2*VCC/3计算。至于为什么不是VCC,等我搞明白了再来写。确定的是不影响下面的分析过程。
比如:MOS管的开断一直在U4和U6之间等时间切换,则U4 = U6 = Umax/2 = VCC/3,则Uref = 根号三VCC/3。
那么对于任意的Uref,只需要根据其角度和模,计算T4和T6的时间就可以了。
计算过程如下,根据正弦定理:
∣ U r e f ∣ s i n ( 2 π 3 ) = ∣ T 6 T U 6 ∣ s i n ( θ ) = ∣ T 4 T U 4 ∣ s i n ( π 3 − θ ) \frac{|U_{ref}|}{sin(\frac{2\pi}{3})} =\frac{|\frac{T_6}{T}U_6|}{sin(\theta)} =\frac{|\frac{T_4}{T}U_4|}{sin(\frac{\pi}{3}-\theta)} sin(32π)∣Uref∣=sin(θ)∣TT6U6∣=sin(3π−θ)∣TT4U4∣
把U4 = U6 = 2*VCC/3带入,得:
T 4 = 3 ∣ U r e f ∣ V C C T sin ( π 3 − θ ) T 6 = 3 ∣ U r e f ∣ V C C T sin ( θ ) T_4 = \sqrt{3} \frac{|U_{ref}|}{VCC}T\sin(\frac{\pi}{3}-\theta)\\ T_6 = \sqrt{3} \frac{|U_{ref}|}{VCC}T\sin(\theta) T4=3VCC∣Uref∣Tsin(3π−θ)T6=3VCC∣Uref∣Tsin(θ)
剩下的只需要带入Uref的角度和模即可。
如果T4 + T6 < T,则剩下的时间均分给零向量(U0、U7),即T0 = T7 = (T - T4 - T6)/2。
至此,就说明白了怎么在某个扇区内产生任意大小和方向的电压向量,当Uref在其他扇区内也是一样的方法。
6.5 MOS管开断顺序
我们求得了T4、T6、T0、T7的时间,接下来,要把上述时间分配给MOS管,控制MOS管的开断。控制逻辑方式如下图: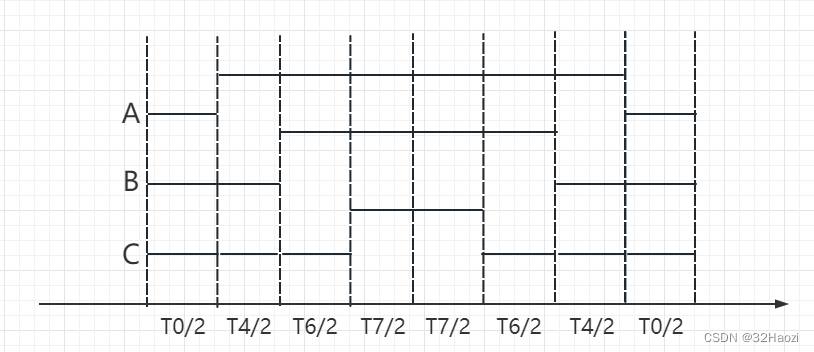
可以看出,MOS管的开断顺序为:000->100->110->111–>111->110->100->000。只需要控制MOS管按照这个顺序开断,并且每次开断的时间控制好,就可以产生需要的电压矢量了。
上述切换顺序,可以减少MOS管开断的次数,每次切换只有一组MOS管切换状态。
同理,我们将其他五个扇区也用同样的方式写出来。
则不同扇区的切换顺序分别为:
| 期望向量所在的扇区 | MOS管切换顺序 |
|---|---|
| 1(0-60) | 0-4-6-7-7-6-4-0 |
| 2(60-120) | 0-2-6-7-7-6-2-0 |
| 3(120-180) | 0-2-3-7-7-3-2-0 |
| 4(180-240) | 0-1-3-7-7-3-1-0 |
| 5(240-300) | 0-1-5-7-7-5-1-0 |
| 6(300-360) | 0-4-5-7-7-5-4-0 |
最后一步,这个MOS管的切换顺序和持续时间都有了,使用硬件控制就可以了。
至此,我们就搞完了电机最内环(电流环/力矩环)的控制流程。
7. 完整控制流程
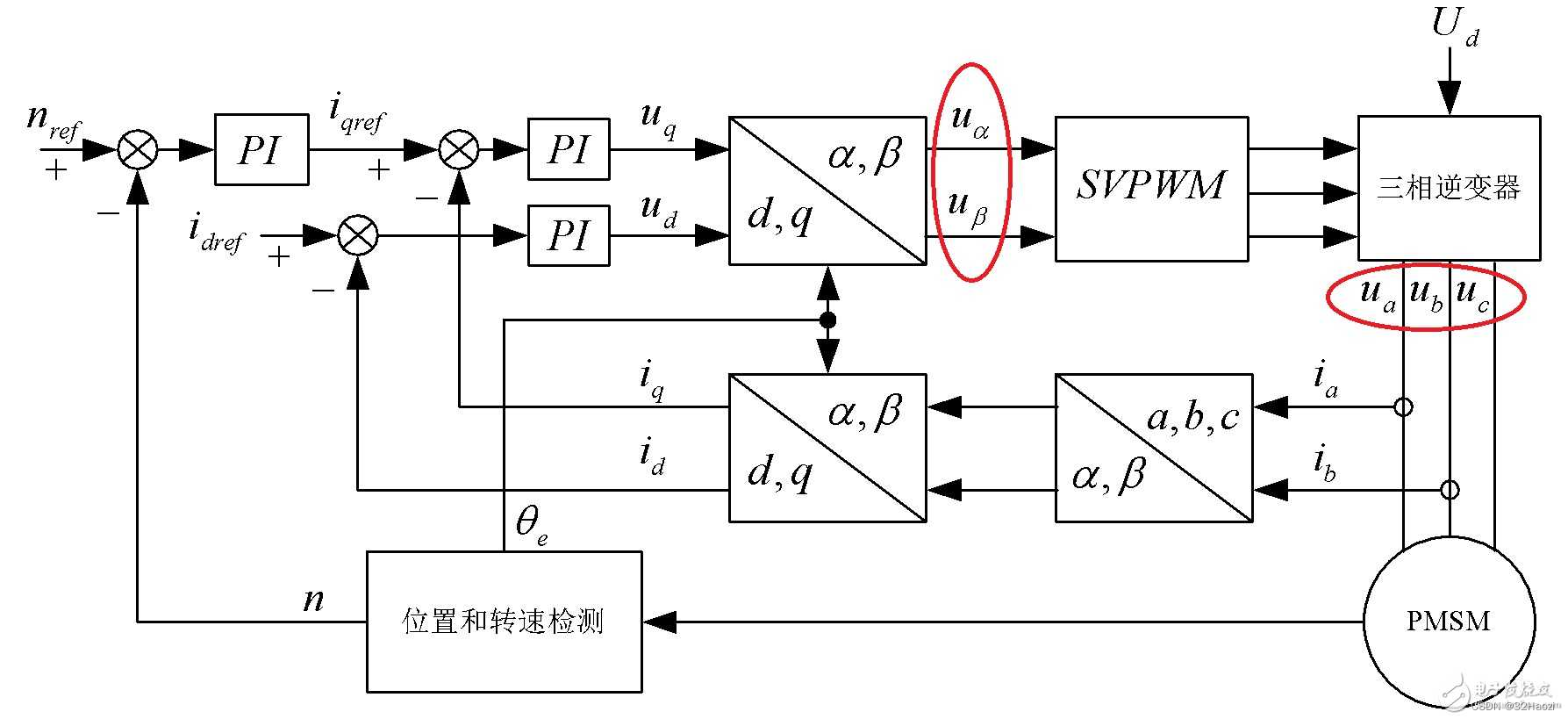
上图中除去nref之后,就是电机控制最内环的FOC控制算法了,流程已经讲完了。
总结一下:
上图中,设定iq=1、id=0,然后按照上述控制流程,就可以使电机按照三个项的电流按照正弦波的波形变化了(仔细思考一下,这里的正弦波是把电机中性点看作地而量出来的)。
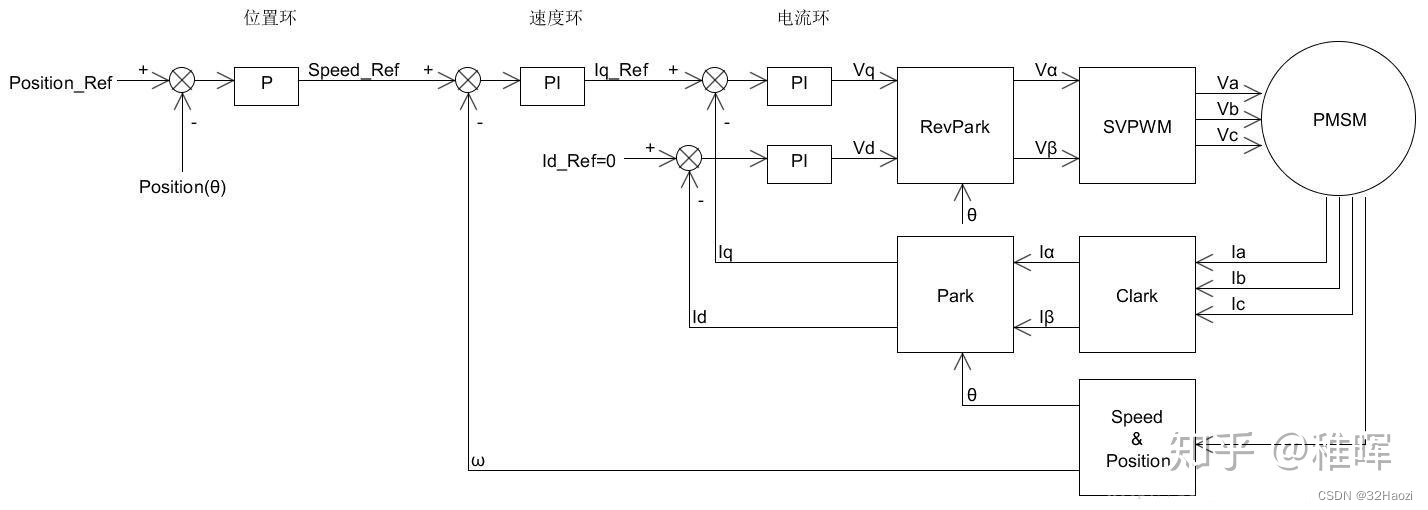
然后来扩充:
如何实现速度和位置控制呢?看下图(来自大佬的图片,看水印)。
这个应该是很清晰了,就不过多介绍了。
好了,你已经学会FOC算法了,接下来来造个火箭吧。
8. 硬件篇 和 软件篇
开源链接:https://gitee.com/HzoZi/foc
9. 补充概念
9.1 BLDC、PMSM
无刷电机可以分为无刷直流电机(BLDC)和永磁同步电机(PMSM),结构大同小异,主要区别在于制造方式(线圈绕组方式)不同导致的一些特性差异(比如反电动势的波形)。
第一种,我们分析可以看出来,转子一共有六个平衡状态(看六步换向法),在每次换相的时候力的大小和方向会发生改变,因此会有扭矩的抖动。但是如果我们把磁极多增加几对,转子就会有更多的平衡状态,这样同样的旋转角度,抖动的次数变多了,但是抖动的程度就可以小的很多很多了。这就是**无刷直流电机(BLDC)**的解决方式,可以看文章刚开始的图,有很多对线圈。
第二种,也就是永磁同步电机(PMSM) 的解决方法。BLDC的反电动势被设计成了方形波,不管哪条线电压都是只有 有或者没有两种状态。而PMSM被设计成了正弦波。我们可以使用软硬件的手段将方波转变成等效的SPWM正弦波或者SVPWM马鞍波就可以完美的驱动电机运行了。这就是FOC。FOC(Field-Oriented Control),直译是磁场定向控制,也被称作矢量控制(VC,Vector Control),可以实现磁场方面的像素级控制。
9.2 马鞍波
我们一直说,驱动电机运转使用的是正弦波。
但是这个正弦波是把电机中性点看作是0电势点来说的。
但实际上,我们一般认为的 0电势点 是 GND。也就是电源负极。
而在这种视角来看,测量电机三相的电压就会发现,其是一个马鞍波,如下图所示。