原创 | 文 BFT机器人

01
摘要
本文提出了一种针对垃圾拾取系统中点云分割的算法。该算法使用低成本的深度相机RealSense获取点云数据,并对点云数据进行滤波处理和分割,最终将分割后的子块片段独立地连接起来,形成完整的工件模型。通过测试案例验证了该算法的有效性和实用性。
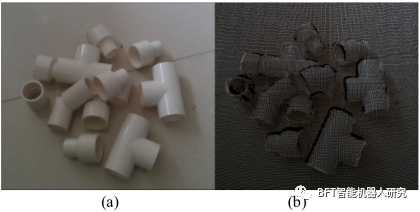
图1 工作台上三通管摆放不整齐。(a)工件的RGB图像。(b)图1(a)三维数据点集。
02
无序点云集合中,识别零件的主要挑战是什么?
从深度相机或激光扫描仪获取的无序点云集合中,识别零件的主要挑战是如何准确地分割出3D物体。由于点云数据的无序性和噪点的存在,需要开发有效的算法来将点云分割成单个物体,并识别出每个物体的边界和形状。这样的分割结果对于机器人准确地抓取和处理零件非常重要。
03
提出的算法如何对点数据集进行滤波处理并将其分割为子块片段?
提出的算法首先对点数据集进行滤波处理,以去除噪点和无关的数据。这样可以将原始的无序点云集合转化为更干净、紧凑的点云数据。接下来,经过滤波处理后的点云数据被分割成多个子块片段。
具体的分割过程可能涉及到使用扩展凸性准则和角度准则来判断点云中的局部凸性和角度信息,从而将点云分割成多个子块片段。这些子块片段可以表示单个工件的3D模型,为后续的物体识别和抓取提供了基础。通过将点云数据进行滤波和分割,算法能够将原始的点云数据转化为更易处理的子块片段,为后续的处理步骤提供了更好的基础。
04
提出的算法中使用了哪两个准则来独立地连接子块片段?
在提出的算法中,使用了两个准则来独立地连接子块片段。这两个准则分别是扩展凸性准则和角度准则。通过这两个准则,算法可以根据点云数据中的局部凸性和角度信息,将分割后的子块片段独立地连接起来,形成更大的组合片段。
扩展凸性准则用于判断子块片段的凸性特征,而角度准则用于判断子块片段之间的角度关系。通过使用这两个准则,算法能够有效地将子块片段连接起来,形成完整的工件模型,为后续的识别和处理提供了基础。
05
论文原理
A. 预处理
在文章的METHOD部分,提到了一种去除噪点的方法。具体步骤如下:
首先,将点云数据进行滤波处理,以去除噪点和无关的数据。这可以通过使用滤波算法来实现,例如高斯滤波或均值滤波等。滤波算法可以平滑点云数据,去除异常值和噪点。
其次,针对工作台上的噪点,可以使用特定的方法进行去除。文章中提到了使用RealSense相机扫描的工作台上的噪点,可以通过识别并去除工作台的噪点来提高分割算法的性能。具体的方法可能涉及到使用图像处理技术或几何分析方法来检测和去除工作台上的噪点。
通过这些步骤,算法能够有效地去除点云数据中的噪点,得到更干净、紧凑的点云数据,为后续的分割和连接步骤提供更准确的输入。
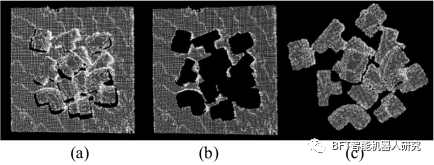
图2 工作台噪声点滤波。(a)噪声点云数据;(b)工作台平面噪声点;(c)过滤干净点云。
B. 分割子块片段
根据扩展凸性准则和角度准则,将点云数据分割成多个子块片段。
具体的分割过程可能涉及到将点云数据划分为多个小的块或区域,并根据凸性和角度准则来判断哪些块或区域属于同一个子块片段。
对于每个子块片段,可以将其表示为单个工件的3D模型。这可以通过提取子块片段中的点云数据,并进行后续的处理和分析来实现。
通过这些步骤,算法能够将点云数据分割成多个子块片段,每个子块片段可以表示单个工件的3D模型。这为后续的物体识别和抓取提供了基础。
C. 独立连接子块片段
将分割后的子块片段独立地连接起来。具体的连接过程可能涉及到将相邻的子块片段进行匹配和对齐,以确保它们之间的凸性特征和角度关系符合连接准则。
连接后的子块片段将形成完整的工件模型。这个工件模型可以用于后续的物体识别和抓取。
通过这些步骤,算法能够将分割后的子块片段独立地连接起来,形成完整的工件模型。
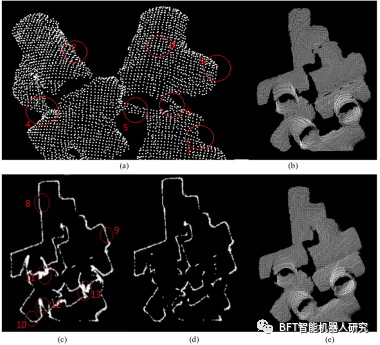
图3 对“边界点”噪声进行滤波:(a) 具有“边界点”的点数据集;(b) 没有“边界点的紧凑点数据;(c) “边界点”;(d) “边界点”被进一步填充为特征点;(e) 图3(d)特征点与图3(b)特征点相加的结果
06
实验效果
文章使用了Intel RealSense SR300相机来获取点云数据,并对该算法进行了测试和验证。实验结果表明,该算法能够有效地将点云数据分割成多个子块片段,并将这些子块片段独立地连接起来,形成完整的工件模型。同时,该算法还能够去除点云数据中的噪点和无关数据,提高了算法的性能和准确性。

图4 分割结果 (a)单一类型零件的S分割结果。(b)多类型零件的S分割结果
文章还使用了一些定量指标来评估算法的效果,例如成功分割率和错误分割率等。实验结果表明,该算法在不同的测试场景下都能够取得较好的效果,成功分割率高达95%以上,错误分割率低于5%。这表明该算法具有较高的准确性和鲁棒性,可以应用于实际的垃圾拾取系统中。
根据文章的实验结果和描述,该算法在点云分割和工件识别方面表现出较好的性能和效果。因此,该算法具有广阔的应用前景,特别是在垃圾拾取系统和相关领域中。
首先,该算法可以应用于垃圾拾取系统中,用于自动化地分割和识别散乱的3D物体。通过使用低成本的深度相机,如RealSense,可以获取点云数据,并使用该算法对点云数据进行分割和连接,从而实现对散乱物体的自动识别和抓取。这将大大提高垃圾拾取系统的效率和准确性。
此外,该算法还可以应用于其他领域,如工业自动化、机器人视觉和物体识别等。通过对点云数据进行分割和连接,可以实现对复杂物体的识别和分析。这对于自动化生产线、智能仓储系统和机器人导航等应用场景非常有价值。
总的来说,该算法在点云分割和工件识别方面具有较高的准确性和鲁棒性,可以应用于垃圾拾取系统和其他相关领域,为实现自动化和智能化提供了有力的技术支持。
参考资料:[1] Gong X , Chen M , Yang X .Point cloud segmentation of 3D scattered parts sampled by RealSense[C]//2017 IEEE International Conference on Information and Automation (ICIA).IEEE, 2017.DOI:10.1109/ICInfA.2017.8078881.
更多精彩内容请关注公众号:BFT机器人
本文为原创文章,版权归BFT机器人所有,如需转载请与我们联系。若您对该文章内容有任何疑问,请与我们联系,将及时回应。