残差构建和雅克比推导
最近在阅读LIO-SAM源码的时候,在它这个后端优化部分这里,scan_to_map里面涉及到了一些数学原理,这部分作者写得和LOAM很像,同样采用了欧拉角来推导残差和雅可比矩阵,最后基于此构建增量方程进行求解。实际上在了解清楚原理之后,再去看这部分的源码的时候也是比较好理解的。因为这一部分相对来说比较多的细节,所以这里单独一节记录下来。这部分对应的代码在 LIO-SAM/src/mapOptmization.cpp的scan2MapOptimization()函数中。
点线残差构建
点线残差的定义为点到线的距离,在该直线上取两个点 A=(x1,y1,z1), B=(x2,y2,z2),设当前点为 P=(x0,y0,z0),如下
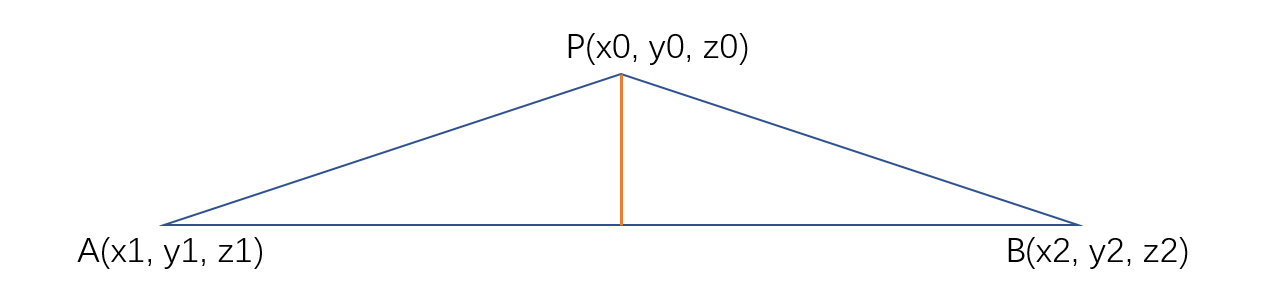
要计算点到直线的距离,只需要先计算三角形的面积,然后除以底边的模长即可
三角形面积计算
S △ A B P ∝ ∣ P A → × P B → ∣ P A → × P B → = ∣ i j k x 1 − x 0 y 1 − y 0 z 1 − z 0 x 2 − x 0 y 2 − y 0 z 2 − z 0 ∣ = ∣ ( y 1 − y 0 ) ( z 2 − z 0 ) − ( z 1 − z 0 ) ( y 2 − y 0 ) ( z 1 − z 0 ) ( x 2 − x 0 ) − ( x 1 − x 0 ) ( z 2 − z 0 ) ( x 1 − x 0 ) ( y 2 − y 0 ) − ( y 1 − y 0 ) ( x 2 − x 0 ) ∣ ∣ P A → × P B → ∣ = ( P A → × P B → ) T ( P A → × P B → ) = ( ( y 1 − y 0 ) ( z 2 − z 0 ) − ( z 1 − z 0 ) ( y 2 − y 0 ) ) 2 + ( ( z 1 − z 0 ) ( x 2 − x 0 ) − ( x 1 − x 0 ) ( z 2 − z 0 ) ) 2 + ( ( x 1 − x 0 ) ( y 2 − y 0 ) − ( y 1 − y 0 ) ( x 2 − x 0 ) ) 2 \begin{aligned} &S_{\triangle A B P} \propto|\overrightarrow{P A} \times \overrightarrow{P B}|\\ &\overrightarrow{P A} \times \overrightarrow{P B}=\left|\begin{array}{ccc} i & j & k \\ x_1-x_0 & y_1-y_0 & z_1-z_0 \\ x_2-x_0 & y_2-y_0 & z_2-z_0 \end{array}\right|\\ &=\left|\begin{array}{c} \left(y_1-y_0\right)\left(z_2-z_0\right)-\left(z_1-z_0\right)\left(y_2-y_0\right) \\ \left(z_1-z_0\right)\left(x_2-x_0\right)-\left(x_1-x_0\right)\left(z_2-z_0\right) \\ \left(x_1-x_0\right)\left(y_2-y_0\right)-\left(y_1-y_0\right)\left(x_2-x_0\right) \end{array}\right|\\ &\mid\overrightarrow{P A} \times \overrightarrow{P B} \mid=(\overrightarrow{P A} \times \overrightarrow{P B})^T(\overrightarrow{P A} \times \overrightarrow{P B})\\ &=\left(\left(y_1-y_0\right)\left(z_2-z_0\right)-\left(z_1-z_0\right)\left(y_2-y_0\right)\right)^2\\ &+\left(\left(z_1-z_0\right)\left(x_2-x_0\right)-\left(x_1-x_0\right)\left(z_2-z_0\right)\right)^2\\ &+\left(\left(x_1-x_0\right)\left(y_2-y_0\right)-\left(y_1-y_0\right)\left(x_2-x_0\right)\right)^2 \end{aligned} S△ABP∝∣PA×PB∣PA×PB=∣
∣ix1−x0x2−x0jy1−y0y2−y0kz1−z0z2−z0∣
∣=∣
∣(y1−y0)(z2−z0)−(z1−z0)(y2−y0)(z1−z0)(x2−x0)−(x1−x0)(z2−z0)(x1−x0)(y2−y0)−(y1−y0)(x2−x0)∣
∣∣PA×PB∣=(PA×PB)T(PA×PB)=((y1−y0)(z2−z0)−(z1−z0)(y2−y0))2+((z1−z0)(x2−x0)−(x1−x0)(z2−z0))2+((x1−x0)(y2−y0)−(y1−y0)(x2−x0))2
对应到代码中是:
// 计算 PA x PB 的模长
float a012 = sqrt(((x0 - x1)*(y0 - y2) - (x0 - x2)*(y0 - y1)) * ((x0 - x1)*(y0 - y2) - (x0 - x2)*(y0 - y1))
+ ((x0 - x1)*(z0 - z2) - (x0 - x2)*(z0 - z1)) * ((x0 - x1)*(z0 - z2) - (x0 - x2)*(z0 - z1))
+ ((y0 - y1)*(z0 - z2) - (y0 - y2)*(z0 - z1)) * ((y0 - y1)*(z0 - z2) - (y0 - y2)*(z0 - z1)));
// 计算 AB 模长
float l12 = sqrt((x1 - x2)*(x1 - x2) + (y1 - y2)*(y1 - y2) + (z1 - z2)*(z1 - z2));
// P 到 AB 的距离
float ld2 = a012 / l12;
残差对点的雅可比矩阵
分为两步,先对点求导,再对位姿求导
J = ∂ d ∂ T w b = ∂ d ∂ p w ∂ p w ∂ T w b J=\frac{\partial d}{\partial T_{w b}}=\frac{\partial d}{\partial \boldsymbol{p}^w} \frac{\partial \boldsymbol{p}^w}{\partial \boldsymbol{T}_{w b}} J=∂Twb∂d=∂pw∂d∂Twb∂pw
设 p m = P M → = P A → × P B → \boldsymbol{p}_m=\overrightarrow{P M}=\overrightarrow{P A} \times \overrightarrow{P B} pm=PM=PA×PB , 残差为:
d ∝ ( ( y 1 − y 0 ) ( z 2 − z 0 ) − ( z 1 − z 0 ) ( y 2 − y 0 ) ) 2 + ( ( z 1 − z 0 ) ( x 2 − x 0 ) − ( x 1 − x 0 ) ( z 2 − z 0 ) ) 2 + ( ( x 1 − x 0 ) ( y 2 − y 0 ) − ( y 1 − y 0 ) ( x 2 − x 0 ) ) 2 = p m T p m = ( p m x 2 + p m y 2 + p m z 2 ) \begin{aligned} &d \propto \sqrt{\begin{array}{l} \left(\left(y_1-y_0\right)\left(z_2-z_0\right)-\left(z_1-z_0\right)\left(y_2-y_0\right)\right)^2 \\ +\left(\left(z_1-z_0\right)\left(x_2-x_0\right)-\left(x_1-x_0\right)\left(z_2-z_0\right)\right)^2 \\ +\left(\left(x_1-x_0\right)\left(y_2-y_0\right)-\left(y_1-y_0\right)\left(x_2-x_0\right)\right)^2 \end{array}}\\ &=\sqrt{\boldsymbol{p}_m^T \boldsymbol{p}_m}\\ &=\sqrt{\left(p_{m x}^2+p_{m y}^2+p_{m z}^2\right)} \end{aligned} d∝((y1−y0)(z2−z0)−(z1−z0)(y2−y0))2+((z1−z0)(x2−x0)−(x1−x0)(z2−z0))2+((x1−x0)(y2−y0)−(y1−y0)(x2−x0))2=pmTpm=(pmx2+pmy2+pmz2)
得到残差的表达式之后,分别对(x0,y0,z0)求导可得
∂ d ∂ p w = [ ∂ d ∂ x 0 ∂ d ∂ y 0 ∂ d ∂ z 0 ] T ∝ 1 2 [ 2 p m y ( ( z 2 − z 0 ) − ( z 1 − z 0 ) ) + 2 p m z ( ( y 1 − y 0 ) − ( y 2 − y 0 ) ) 2 p m z ( ( x 2 − x 0 ) − ( x 1 − x 0 ) ) + 2 p m x ( ( z 1 − z 0 ) − ( z 2 − z 0 ) ) 2 p m x ( ( y 2 − y 0 ) − ( y 1 − y 0 ) ) + 2 p m y ( ( x 1 − x 0 ) − ( x 2 − x 0 ) ) ] T = [ p m y ( z 2 − z 1 ) + p m z ( y 1 − y 2 ) p m z ( x 2 − x 1 ) + p m x ( z 1 − z 2 ) p m x ( y 2 − y 1 ) + p m y ( x 1 − x 2 ) ] \begin{aligned} \frac{\partial d}{\partial \boldsymbol{p}^w} &=\left[\begin{array}{l} \frac{\partial d}{\partial x_0} \\ \frac{\partial d}{\partial y_0} \\ \frac{\partial d}{\partial z_0} \end{array}\right]^T \\ & \propto \frac{1}{2}\left[\begin{array}{c} 2 p_{m y}\left(\left(z_2-z_0\right)-\left(z_1-z_0\right)\right)+2 p_{m z}\left(\left(y_1-y_0\right)-\left(y_2-y_0\right)\right) \\ 2 p_{m z}\left(\left(x_2-x_0\right)-\left(x_1-x_0\right)\right)+2 p_{m x}\left(\left(z_1-z_0\right)-\left(z_2-z_0\right)\right) \\ 2 p_{m x}\left(\left(y_2-y_0\right)-\left(y_1-y_0\right)\right)+2 p_{m y}\left(\left(x_1-x_0\right)-\left(x_2-x_0\right)\right) \end{array}\right]^T \\ &=\left[\begin{array}{l} p_{m y}\left(z_2-z_1\right)+p_{m z}\left(y_1-y_2\right) \\ p_{m z}\left(x_2-x_1\right)+p_{m x}\left(z_1-z_2\right) \\ p_{m x}\left(y_2-y_1\right)+p_{m y}\left(x_1-x_2\right) \end{array}\right] \end{aligned} ∂pw∂d=⎣
⎡∂x0∂d∂y0∂d∂z0∂d⎦
⎤T∝21⎣
⎡2pmy((z2−z0)−(z1−z0))+2pmz((y1−y0)−(y2−y0))2pmz((x2−x0)−(x1−x0))+2pmx((z1−z0)−(z2−z0))2pmx((y2−y0)−(y1−y0))+2pmy((x1−x0)−(x2−x0))⎦
⎤T=⎣
⎡pmy(z2−z1)+pmz(y1−y2)pmz(x2−x1)+pmx(z1−z2)pmx(y2−y1)+pmy(x1−x2)⎦
⎤
对应到代码中为
// 计算残差对点的雅可比矩阵并进行单位化
float la = ((y1 - y2)*((x0 - x1)*(y0 - y2) - (x0 - x2)*(y0 - y1))
+ (z1 - z2)*((x0 - x1)*(z0 - z2) - (x0 - x2)*(z0 - z1))) / a012 / l12;
float lb = -((x1 - x2)*((x0 - x1)*(y0 - y2) - (x0 - x2)*(y0 - y1))
- (z1 - z2)*((y0 - y1)*(z0 - z2) - (y0 - y2)*(z0 - z1))) / a012 / l12;
float lc = -((x1 - x2)*((x0 - x1)*(z0 - z2) - (x0 - x2)*(z0 - z1))
+ (y1 - y2)*((y0 - y1)*(z0 - z2) - (y0 - y2)*(z0 - z1))) / a012 / l12;
点面残差构建
点到的平面的距离作为残差,对系数进行归一化处理,则计算方式为:
d h = ∣ p a ⋅ x 0 + p b ⋅ y 0 + p c ⋅ z 0 + p d ∣ p a 2 + p b 2 + p c 2 = ∣ p a ⋅ x 0 + p b ⋅ y 0 + p c ⋅ z 0 + p d ∣ d_h=\frac{\left|p a \cdot x_0+p b \cdot y_0+p c \cdot z_0+p d\right|}{\sqrt{p a^2+p b^2+p c^2}}=\left|p a \cdot x_0+p b \cdot y_0+p c \cdot z_0+p d\right| dh=pa2+pb2+pc2∣pa⋅x0+pb⋅y0+pc⋅z0+pd∣=∣pa⋅x0+pb⋅y0+pc⋅z0+pd∣
// 五个点组成5个约束,三个变量
Eigen::Matrix<float, 5, 3> matA0;
Eigen::Matrix<float, 5, 1> matB0;
Eigen::Vector3f matX0;
matA0.setZero();
matB0.fill(-1);
matX0.setZero();
// 要求距离都小于1m
if (pointSearchSqDis[4] < 1.0) {
for (int j = 0; j < 5; j++) { // 构建超定方程组
matA0(j, 0) = laserCloudSurfFromMapDS->points[pointSearchInd[j]].x;
matA0(j, 1) = laserCloudSurfFromMapDS->points[pointSearchInd[j]].y;
matA0(j, 2) = laserCloudSurfFromMapDS->points[pointSearchInd[j]].z;
}
// 假设平面方程为ax+by+cz+1=0,这里就是求方程的系数abc,d=1
matX0 = matA0.colPivHouseholderQr().solve(matB0);
// 平面方程的系数,也是法向量的分量
float pa = matX0(0, 0);
float pb = matX0(1, 0);
float pc = matX0(2, 0);
float pd = 1;
// 单位法向量
float ps = sqrt(pa * pa + pb * pb + pc * pc);
pa /= ps; pb /= ps; pc /= ps; pd /= ps;
// 检查平面是否合格,如果5个点中有点到平面的距离超过0.2m,那么认为这些点太分散了,不构成平面
bool planeValid = true;
for (int j = 0; j < 5; j++) {
if (fabs(pa * laserCloudSurfFromMapDS->points[pointSearchInd[j]].x +
pb * laserCloudSurfFromMapDS->points[pointSearchInd[j]].y +
pc * laserCloudSurfFromMapDS->points[pointSearchInd[j]].z + pd) > 0.2) {
planeValid = false;
break;
}
}
// 平面合格
if (planeValid) {
// 当前激光帧点到平面距离
float pd2 = pa * pointSel.x + pb * pointSel.y + pc * pointSel.z + pd;
// 惩罚系数
float s = 1 - 0.9 * fabs(pd2) / sqrt(sqrt(pointSel.x * pointSel.x
+ pointSel.y * pointSel.y + pointSel.z * pointSel.z));
// 点到平面垂线单位法向量(其实等价于平面法向量)
coeff.x = s * pa;
coeff.y = s * pb;
coeff.z = s * pc;
// 点到平面距离
coeff.intensity = s * pd2;
if (s > 0.1) {
// 当前激光帧平面点,加入匹配集合中
laserCloudOriSurfVec[i] = pointOri;
// 参数
coeffSelSurfVec[i] = coeff;
laserCloudOriSurfFlag[i] = true;
}
}
残差对点的雅可比矩阵
根据残差的表达式
d h = ∣ p a ⋅ x 0 + p b ⋅ y 0 + p c ⋅ z 0 + p d ∣ p a 2 + p b 2 + p c 2 = ∣ p a ⋅ x 0 + p b ⋅ y 0 + p c ⋅ z 0 + p d ∣ d_h=\frac{\left|p a \cdot x_0+p b \cdot y_0+p c \cdot z_0+p d\right|}{\sqrt{p a^2+p b^2+p c^2}}=\left|p a \cdot x_0+p b \cdot y_0+p c \cdot z_0+p d\right| dh=pa2+pb2+pc2∣pa⋅x0+pb⋅y0+pc⋅z0+pd∣=∣pa⋅x0+pb⋅y0+pc⋅z0+pd∣
残差表达式分别对(x0,y0,z0)求导可以看出,雅可比矩阵就是平面的法向量,所以
// 用法向量作为雅可比,方向由 pd2 间接决定
coeff.x = s * pa;
coeff.y = s * pb;
coeff.z = s * pc;
coeff.intensity = s * pd2;
残差对位移的雅可比
因为
J = ∂ d ∂ T w b = ∂ d ∂ p w ∂ p w ∂ T w b J=\frac{\partial d}{\partial T_{w b}}=\frac{\partial d}{\partial \boldsymbol{p}^w} \frac{\partial \boldsymbol{p}^w}{\partial \boldsymbol{T}_{w b}} J=∂Twb∂d=∂pw∂d∂Twb∂pw
实际上我们要求的是
mat A = [ ∂ d ∂ roll ∂ d ∂ p i t c h ∂ d ∂ y a w ∂ d ∂ t x ∂ d ∂ t y ∂ d ∂ t z ] \operatorname{mat} A=\left[\begin{array}{c} \frac{\partial d}{\partial \text { roll }} \\ \frac{\partial d}{\partial p i t c h} \\ \frac{\partial d}{\partial y a w} \\ \frac{\partial d}{\partial t_x} \\ \frac{\partial d}{\partial t_y} \\ \frac{\partial d}{\partial t_z} \end{array}\right] matA=⎣
⎡∂ roll ∂d∂pitch∂d∂yaw∂d∂tx∂d∂ty∂d∂tz∂d⎦
⎤
通过上面的几步求得了残差对点的雅可比,下面求点对位姿的雅可比即可
设 Lidar 相对于世界坐标系旋转矩阵为R ,平移为t ,将 Lidar 坐标系下的点转为世界坐标系的过程为:
p w = R p + t \boldsymbol{p}^w=\boldsymbol{R} \boldsymbol{p}+\boldsymbol{t} pw=Rp+t
因为对平移的雅可比矩阵即为:
∂ p w ∂ t = ∂ R p + t ∂ t = I \frac{\partial p^w}{\partial t}=\frac{\partial \boldsymbol{R} p+t}{\partial t}=\boldsymbol{I} ∂t∂pw=∂t∂Rp+t=I
所以
J t = ∂ d ∂ t w b = ∂ d ∂ p w ∂ p w ∂ t = ∂ d ∂ p w J_t=\frac{\partial d}{\partial t_{w b}}=\frac{\partial d}{\partial \boldsymbol{p}^w} \frac{\partial \boldsymbol{p}^w}{\partial \boldsymbol{t}} = \frac{\partial d}{\partial \boldsymbol{p}^w} Jt=∂twb∂d=∂pw∂d∂t∂pw=∂pw∂d
对应到代码中即为:
// 残差对位移的求导
matA.at<float>(i, 3) = coeff.z;
matA.at<float>(i, 4) = coeff.x;
matA.at<float>(i, 5) = coeff.y;
残差对旋转的雅可比
LOAM 原作者选择的是 ZXY 外旋(沿固定 Z 轴旋转-> 沿固定 X 轴旋转 -> 沿固定 Y 轴旋转)表示,这里作者也沿用了这种旋转方式,因此 ZXY 外旋的旋转矩阵的计算方式为:R=RyRxRz,即:
R = R y R x R z = [ cos ( r y ) 0 sin ( r y ) 0 1 0 − sin ( r y ) 0 cos ( r y ) ] [ 1 0 0 0 cos ( r x ) − sin ( r x ) 0 sin ( r x ) cos ( r x ) ] [ cos ( r z ) − sin ( r z ) 0 sin ( r z ) cos ( r z ) 0 0 0 1 ] = [ cos ( r y ) cos ( r z ) + sin ( r y ) sin ( r x ) sin ( r z ) cos ( r z ) sin ( r y ) sin ( r x ) − cos ( r y ) sin ( r z ) cos ( r x ) sin ( r y ) cos ( r x ) sin ( r z ) cos ( r x ) cos ( r z ) − sin ( r x ) cos ( r y ) sin ( r x ) sin ( r z ) − cos ( r z ) sin ( r y ) cos ( r y ) cos ( r z ) sin ( r x ) + sin ( r y ) sin ( r z ) cos ( r y ) cos ( r x ) ] \begin{aligned} \boldsymbol{R} &=\boldsymbol{R}_y \boldsymbol{R}_x \boldsymbol{R}_z \\ &=\left[\begin{array}{ccc} \cos (r y) & 0 & \sin (r y) \\ 0 & 1 & 0 \\ -\sin (r y) & 0 & \cos (r y) \end{array}\right]\left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & \cos (r x) & -\sin (r x) \\ 0 & \sin (r x) & \cos (r x) \end{array}\right]\left[\begin{array}{ccc} \cos (r z) & -\sin (r z) & 0 \\ \sin (r z) & \cos (r z) & 0 \\ 0 & 0 & 1 \end{array}\right] \\ &=\left[\begin{array}{cccc} \cos (r y) \cos (r z)+\sin (r y) \sin (r x) \sin (r z) & \cos (r z) \sin (r y) \sin (r x)-\cos (r y) \sin (r z) & \cos (r x) \sin (r y) \\ \cos (r x) \sin (r z) & \cos (r x) \cos (r z) & -\sin (r x) \\ \cos (r y) \sin (r x) \sin (r z)-\cos (r z) \sin (r y) & \cos (r y) \cos (r z) \sin (r x)+\sin (r y) \sin (r z) & \cos (r y) \cos (r x) \end{array}\right] \end{aligned} R=RyRxRz=⎣
⎡cos(ry)0−sin(ry)010sin(ry)0cos(ry)⎦
⎤⎣
⎡1000cos(rx)sin(rx)0−sin(rx)cos(rx)⎦
⎤⎣
⎡cos(rz)sin(rz)0−sin(rz)cos(rz)0001⎦
⎤=⎣
⎡cos(ry)cos(rz)+sin(ry)sin(rx)sin(rz)cos(rx)sin(rz)cos(ry)sin(rx)sin(rz)−cos(rz)sin(ry)cos(rz)sin(ry)sin(rx)−cos(ry)sin(rz)cos(rx)cos(rz)cos(ry)cos(rz)sin(rx)+sin(ry)sin(rz)cos(rx)sin(ry)−sin(rx)cos(ry)cos(rx)⎦
⎤
又因为平移对旋转的求导为0,所以可以得到:
这里首先对rx进行求导
∂ ( R p ) ∂ r x = [ ( sin ( r y ) cos ( r x ) sin ( r z ) ) p x + ( cos ( r z ) sin ( r y ) cos ( r x ) ) p y − ( sin ( r x ) sin ( r y ) ) p z − ( sin ( r x ) sin ( r z ) ) p x − ( sin ( r x ) cos ( r z ) ) p y − ( cos ( r x ) ) p z ( cos ( r y ) cos ( r x ) sin ( r z ) ) p x + ( cos ( r y ) cos ( r z ) cos ( r x ) ) p y − ( cos ( r y ) sin ( r x ) ) p z ] \frac{\partial(\boldsymbol{R} \boldsymbol{p})}{\partial r x}=\left[\begin{array}{c} (\sin (r y) \cos (r x) \sin (r z)) p_x+(\cos (r z) \sin (r y) \cos (r x)) p_y-(\sin (r x) \sin (r y)) p_z \\ -(\sin (r x) \sin (r z)) p_x-(\sin (r x) \cos (r z)) p_y-(\cos (r x)) p_z \\ (\cos (r y) \cos (r x) \sin (r z)) p_x+(\cos (r y) \cos (r z) \cos (r x)) p_y-(\cos (r y) \sin (r x)) p_z \end{array}\right] ∂rx∂(Rp)=⎣
⎡(sin(ry)cos(rx)sin(rz))px+(cos(rz)sin(ry)cos(rx))py−(sin(rx)sin(ry))pz−(sin(rx)sin(rz))px−(sin(rx)cos(rz))py−(cos(rx))pz(cos(ry)cos(rx)sin(rz))px+(cos(ry)cos(rz)cos(rx))py−(cos(ry)sin(rx))pz⎦
⎤
这里得到的是点对旋转的雅可比,再右乘以残差对点的雅可比即(coeff.x,coeff.y,coeff.z)即可得到残差对旋转的雅可比,在代码中就是:
float arx = (crx*sry*srz*pointOri.x + crx*crz*sry*pointOri.y - srx*sry*pointOri.z) * coeff.x
+ (-srx*srz*pointOri.x - crz*srx*pointOri.y - crx*pointOri.z) * coeff.y
+ (crx*cry*srz*pointOri.x + crx*cry*crz*pointOri.y - cry*srx*pointOri.z) * coeff.z;
同理,对ry的求导也是如法炮制:
∂ ( R p ) ∂ r y = [ ( − sin ( r y ) cos ( r z ) + cos ( r y ) sin ( r x ) sin ( r z ) ) p x + ( cos ( r z ) cos ( r y ) sin ( r x ) + sin ( r y ) sin ( r z ) ) p y + ( cos ( r x ) cos ( r y ) ) p z 0 ( − sin ( r y ) sin ( r x ) sin ( r z ) − cos ( r z ) cos ( r y ) ) p x + ( − sin ( r y ) cos ( r z ) sin ( r x ) + cos ( r y ) sin ( r z ) ) p y − ( sin ( r y ) cos ( r x ) ) p z ] \begin{aligned} \frac{\partial(\boldsymbol{R} p)}{\partial r y} =\left[\begin{array}{c} (-\sin (r y) \cos (r z)+\cos (r y) \sin (r x) \sin (r z)) p_x +(\cos (r z) \cos (r y) \sin (r x)+\sin (r y) \sin (r z)) p_y+(\cos (r x) \cos (r y)) p_z \\ 0 \\ (-\sin (r y) \sin (r x) \sin (r z)-\cos (r z) \cos (r y)) p_x+(-\sin (r y) \cos (r z) \sin (r x)+\cos(r y) \sin (r z)) p_y-(\sin (r y) \cos (r x)) p_z \end{array}\right] \end{aligned} ∂ry∂(Rp)=⎣
⎡(−sin(ry)cos(rz)+cos(ry)sin(rx)sin(rz))px+(cos(rz)cos(ry)sin(rx)+sin(ry)sin(rz))py+(cos(rx)cos(ry))pz0(−sin(ry)sin(rx)sin(rz)−cos(rz)cos(ry))px+(−sin(ry)cos(rz)sin(rx)+cos(ry)sin(rz))py−(sin(ry)cos(rx))pz⎦
⎤
同样地,再右乘以残差对点的雅可比即(coeff.x,coeff.y,coeff.z)即可得到残差对旋转的雅可比,在代码中就是:
float ary = ((cry*srx*srz - crz*sry)*pointOri.x
+ (sry*srz + cry*crz*srx)*pointOri.y + crx*cry*pointOri.z) * coeff.x
+ ((-cry*crz - srx*sry*srz)*pointOri.x
+ (cry*srz - crz*srx*sry)*pointOri.y - crx*sry*pointOri.z) * coeff.z;
同理,对rz的求导也是如法炮制:
∂ ( R p ) ∂ r z = [ ( − cos ( r y ) sin ( r z ) + sin ( r y ) sin ( r x ) cos ( r z ) ) p x + ( − sin ( r z ) sin ( r y ) sin ( r x ) − cos ( r y ) cos ( r z ) ) p y ( cos ( r x ) cos ( r z ) ) p x − ( cos ( r x ) sin ( r z ) ) p y ( cos ( r y ) sin ( r x ) cos ( r z ) + sin ( r z ) sin ( r y ) ) p x + ( − cos ( r y ) sin ( r z ) sin ( r x ) + sin ( r y ) cos ( r z ) ) p y ] \begin{aligned} \frac{\partial(\boldsymbol{R} p)}{\partial r z} =\left[\begin{array}{c} (-\cos (r y) \sin (r z)+\sin (r y) \sin (r x) \cos (r z)) p_x+(-\sin (r z) \sin (r y) \sin (r x)-\cos (r y) \cos (r z)) p_y \\ (\cos (r x) \cos (r z)) p_x-(\cos (r x) \sin (r z)) p_y \\ (\cos (r y) \sin (r x) \cos (r z)+\sin (r z) \sin (r y)) p_x+(-\cos (r y) \sin (r z) \sin (r x)+\sin (r y) \cos (r z)) p_y \end{array}\right] \end{aligned} ∂rz∂(Rp)=⎣
⎡(−cos(ry)sin(rz)+sin(ry)sin(rx)cos(rz))px+(−sin(rz)sin(ry)sin(rx)−cos(ry)cos(rz))py(cos(rx)cos(rz))px−(cos(rx)sin(rz))py(cos(ry)sin(rx)cos(rz)+sin(rz)sin(ry))px+(−cos(ry)sin(rz)sin(rx)+sin(ry)cos(rz))py⎦
⎤
同样地,再右乘以残差对点的雅可比即(coeff.x,coeff.y,coeff.z)即可得到残差对旋转的雅可比,在代码中就是:
float arz = ((crz*srx*sry - cry*srz)*pointOri.x + (-cry*crz-srx*sry*srz)*pointOri.y)*coeff.x
+ (crx*crz*pointOri.x - crx*srz*pointOri.y) * coeff.y
+ ((sry*srz + cry*crz*srx)*pointOri.x + (crz*sry-cry*srx*srz)*pointOri.y)*coeff.z;
构建增量方程
在得到残差对位姿的雅可比矩阵之后,就可以构建增量方程了,构建增量方程之后,使用QR分解的方式进行求解。这里还做了一个退化检测,如果检测到信息矩阵发生退化就会进入退化处理,对之前求解出来的解进行一个纠正。如下:
cv::transpose(matA, matAt);
matAtA = matAt * matA;
matAtB = matAt * matB;
// J^T·J·delta_x = -J^T·f QR分解进行求解
cv::solve(matAtA, matAtB, matX, cv::DECOMP_QR);
// 首次迭代,检查近似Hessian矩阵(J^T·J)是否退化,或者称为奇异,主要检查信息矩阵的奇异值是否过小
if (iterCount == 0) {
cv::Mat matE(1, 6, CV_32F, cv::Scalar::all(0)); // 存放特征值
cv::Mat matV(6, 6, CV_32F, cv::Scalar::all(0)); // 存放特征向量
cv::Mat matV2(6, 6, CV_32F, cv::Scalar::all(0));
cv::eigen(matAtA, matE, matV);
matV.copyTo(matV2);
isDegenerate = false;
float eignThre[6] = {100, 100, 100, 100, 100, 100};
for (int i = 5; i >= 0; i--) {
if (matE.at<float>(0, i) < eignThre[i]) {
for (int j = 0; j < 6; j++) {
matV2.at<float>(i, j) = 0; // 对于奇异值过小的特征向量直接赋0
}
isDegenerate = true;
} else {
break;
}
}
matP = matV.inv() * matV2;
}
if (isDegenerate)
{
cv::Mat matX2(6, 1, CV_32F, cv::Scalar::all(0));
matX.copyTo(matX2);
matX = matP * matX2; // 实际上就是对于奇异值过小的对应的解就直接赋0,其他解按原增量方程解出来是什么就是什么
}
更新位姿
上面求解得到增量位姿之后,最后一步把它叠加到之前我们通过IMU得到的那个初始值上作为一个scan_to_map的结果
// 更新当前关键帧全局位姿估计
transformTobeMapped[0] += matX.at<float>(0, 0);
transformTobeMapped[1] += matX.at<float>(1, 0);
transformTobeMapped[2] += matX.at<float>(2, 0);
transformTobeMapped[3] += matX.at<float>(3, 0);
transformTobeMapped[4] += matX.at<float>(4, 0);
transformTobeMapped[5] += matX.at<float>(5, 0);
总结
scan_to_map的目的是对我们从IMU里程计得到的 transformTobeMapped 当前帧位姿进行进一步优化。首先,我们用当前帧的特征点去局部地图(这个地图由时空上的近邻帧构成)中构建点到线的距离、点到面的距离,以此作为残差以优化当前帧位姿;然后,我们通过链式法则求残差对位移、旋转的雅可比矩阵;最后利用雅可比矩阵和观测(残差)构建增量方程,用QR分解求解方程得到增量解,叠加到transformTobeMapped 即得到了一个比从里程计来更准确的位姿。