运行配置
主页:https://sarafridov.github.io/K-Planes/
代码:https://github.com/sarafridov/K-Planes
预训练权重:https://drive.google.com/drive/folders/1zs_folzaCdv88y065wc6365uSRfsqITH
Neural_3D_Video_Dataset:https://github.com/facebookresearch/Neural_3D_Video/releases/tag/v1.0
环境搭建
pip install -r requirements.txt
tinycudann 安装参考:https://blog.csdn.net/weixin_50973728/article/details/127537380
scikit-image直接使用pip安装
pip install scikit-image
代码运行
PYTHONPATH='.' python plenoxels/main.py --config-path path/to/config.py
例子
PYTHONPATH='.' python plenoxels/main.py --config-path configs/final/NeRF/nerf_hybrid.py
概念
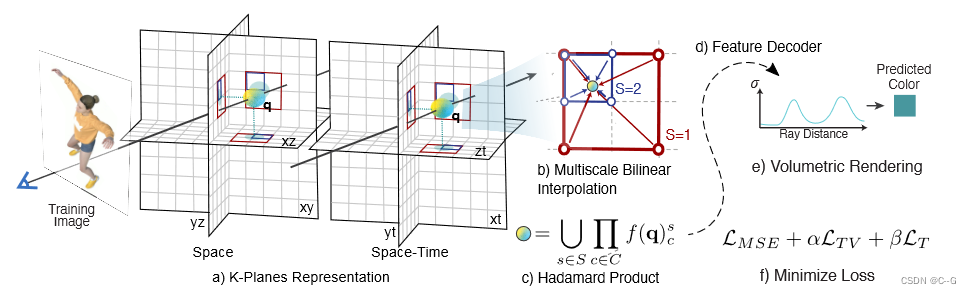
- 将4D动态体积分解为六个平面,三个用于空间,三个用于时空变化。为了获得一个4D点 q = (x, y,
z,t)的值,首先将这个点投影到每个平面上 - 做多尺度双线性插值。
- 将插值值相乘,然后在 S 尺度上连接。
- 这些特征可以用一个小的MLP或显式线性解码器解码。
- 遵循标准的体积渲染公式来预测射线的颜色和密度
- 在空间和时间上进行简单正则化,使重构损失最小化,对模型进行优化。
该文章主要融合了平面分解、mipNeRF,mipNeRF360,Neural 3D Video Synthesis from Multi-view Video,将场景约束在aabb内,将4D场景分解为 静态三维 和 动态三维特征场景,利用mipNeRF的位置编码、蒸馏采样思想得到空间的采样点,对该点在6个平面上分别做双线性插值,将插值后特征相乘或相加得到该点的最终特征向量,此外,还借鉴了Instant-ngp的多分辨率思想,每个平面都有不同的分辨率大小,将不同分辨率大小的特征向量拼接,最终送入小MLP线性解码器或MLP与球谐函数混合的解码器进行解码,得到颜色和密度,通过体渲染公式得到最终颜色值。
代码
优秀UP主代码讲解:https://www.bilibili.com/video/BV1Do4y1i7n6/?spm_id_from=333.337.search-card.all.click
main
# 判断模型类型
if "keyframes" in config:
# 视频
model_type = "video"
elif "appearance_embedding_dim" in config:
# 旅游景点
model_type = "phototourism"
else:
# 静态
model_type = "static"