最新激光相机标定velo2cam_calibration
一、实验前提
1.github上velo2cam_calibration源码
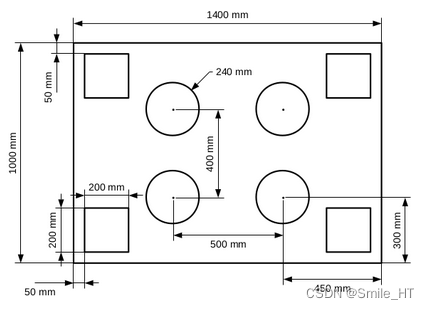
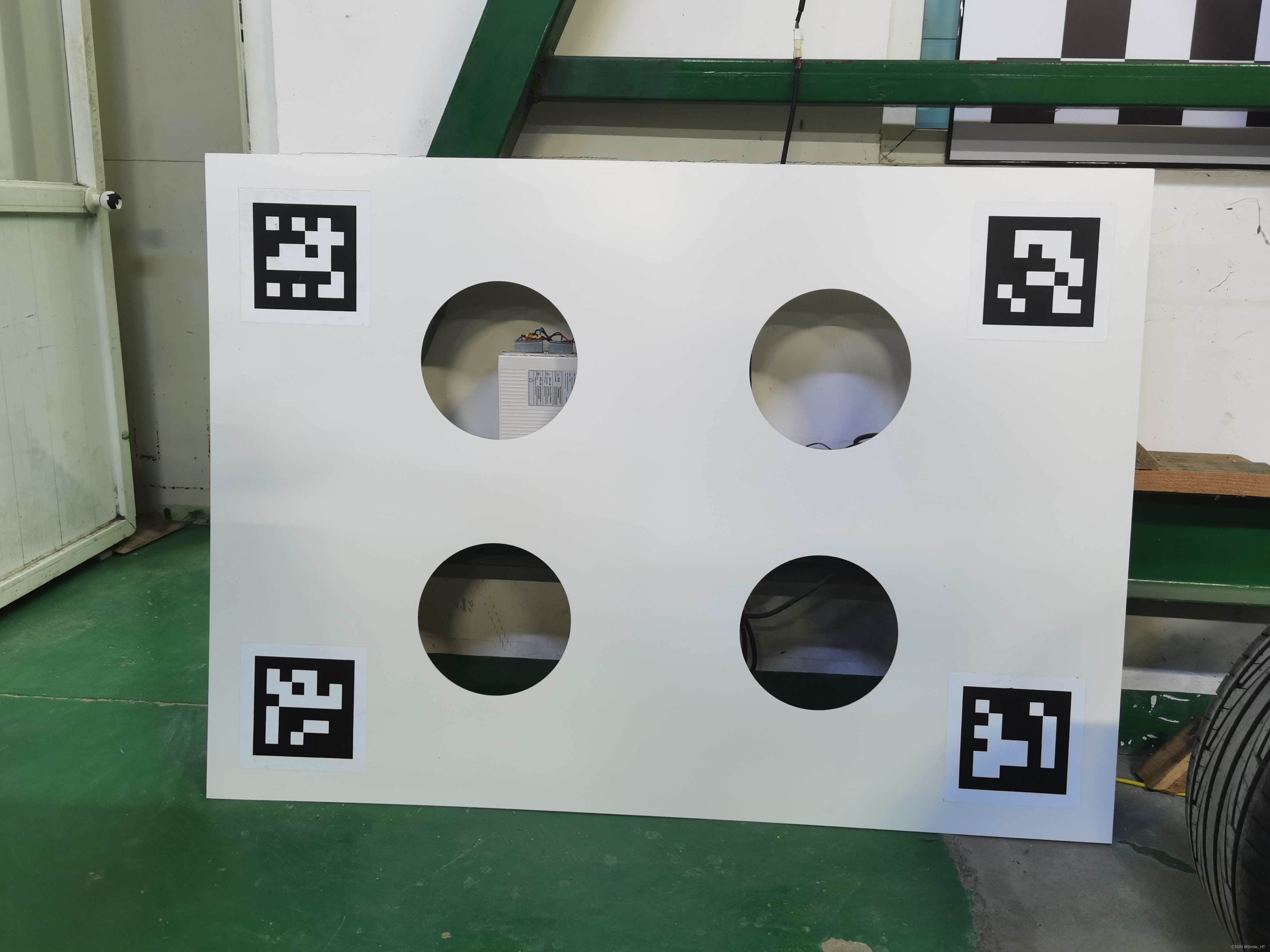
2.标定板制作,定制钢板材质
3. ArUco打印贴上去即可
AprilTag标记跟踪
二、传感器调试
1.1 相机(Kinect DK)
Ubuntu18.04下Azure Kinect DK 调试(SDK源码+ROS)无比详细踩坑教程
roslaunch azure_kinect_ros_driver driver.launch
此处我继续用之前做实验用的kinect,自己调试选择自己用的其他摄像头都是可以的
1.2 激光雷达(Velodyne 16)
Ubuntu18.04+ROS melodic+VLP-16激光雷达环境配置
roslaunch velodyne_pointcloud VLP16_points.launch
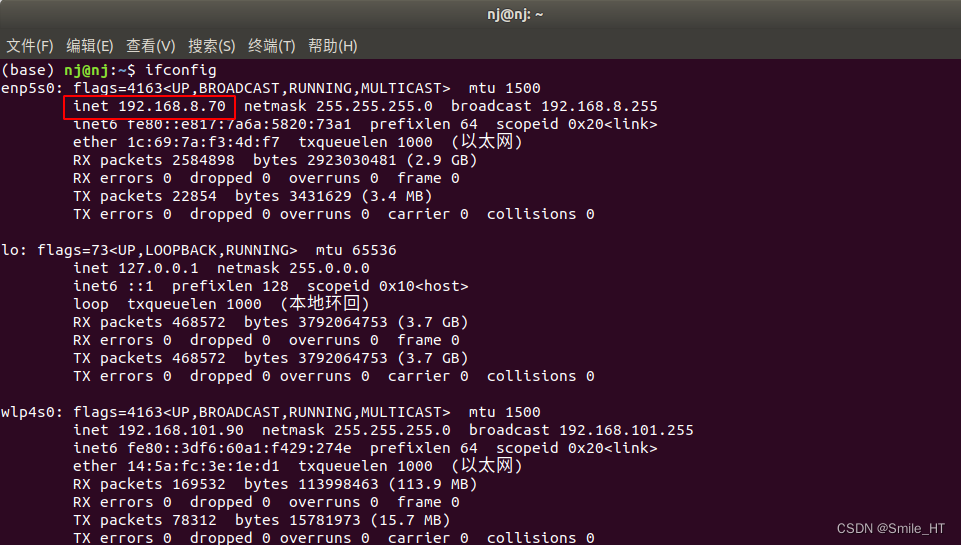
这里的地址ip自己用ifconfig查看
1.3 调试
 /home/nj/catkin_ws/src/velo2cam_calibration/include路径下velo2cam_utils.h 第30行改为
/home/nj/catkin_ws/src/velo2cam_calibration/include路径下velo2cam_utils.h 第30行改为#define DEBUG 1
三、通过ROS发布相机内参消息
3.1 调试相机
l连接好相机,roslaunch azure_kinect_ros_driver driver.launch
然后再开一个终端,输入rostopic list
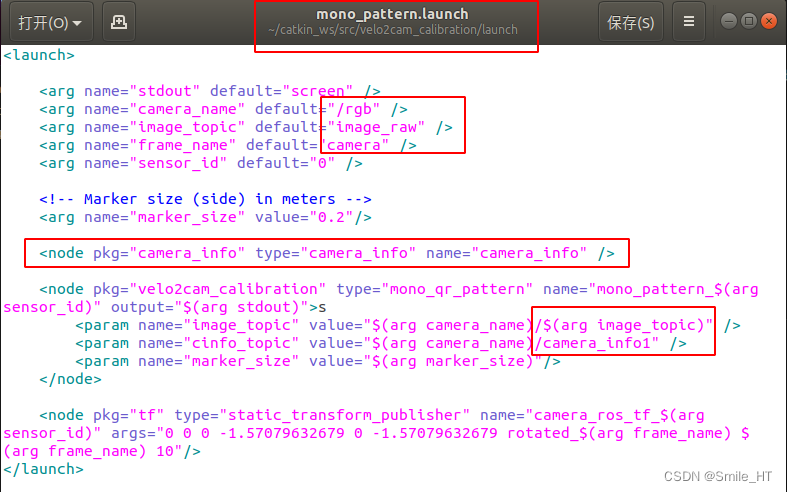
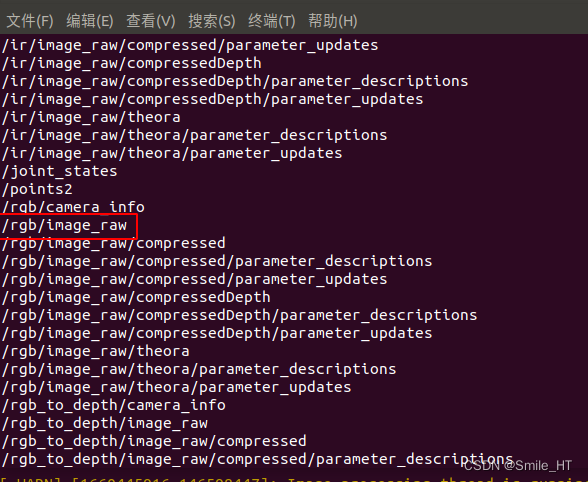 修改launch文件中话题
修改launch文件中话题
source devel/setup.bash
roslaunch velo2cam_calibration mono_pattern.launch
此处本应该会自动弹出一个opencv窗口进而检测到标定版的ArUco,但不知是时间戳未同步还是DK相机畸变个数问题(我的畸变参数只有5个,但是DK内有8个,不知道是不是这对应不上的原因)
换了D455i相机测试,直接就检测到了
下面就先改时间戳呐
3.2 相机内参标定获得内参文件
image_width: 720
image_height: 1280
camera_name: narrow_stereo
camera_matrix:
rows: 3
cols: 3
data: [ 977.1364 , 0. , 1028.06099,
0. , 978.37511, 773.36348,
0. , 0. , 1. ]
camera_model: plumb_bob
distortion_coefficients:
rows: 1
cols: 5
data: [0.079672, -0.036074, -0.001217, -0.001615, 0.000000]
rectification_matrix:
rows: 3
cols: 3
data: [ 1., 0., 0.,
0., 1., 0.,
0., 0., 1.]
projection_matrix:
rows: 3
cols: 4
data: [ 1020.93921, 0. , 1023.06419, 0. ,
0. , 1023.7868 , 770.68412, 0. ,
0. , 0. , 1. , 0. ]
(这两行略过,不用管
c++读取yaml文件 )
git clone https://github.com/jbeder/yaml-cpp.git