视频链接
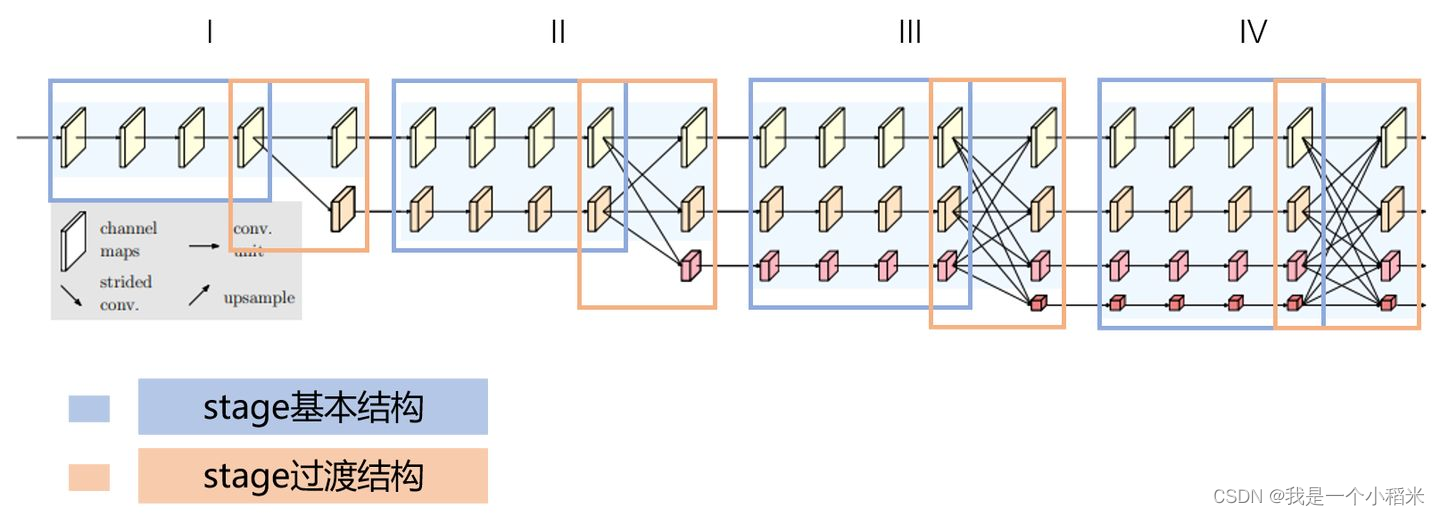
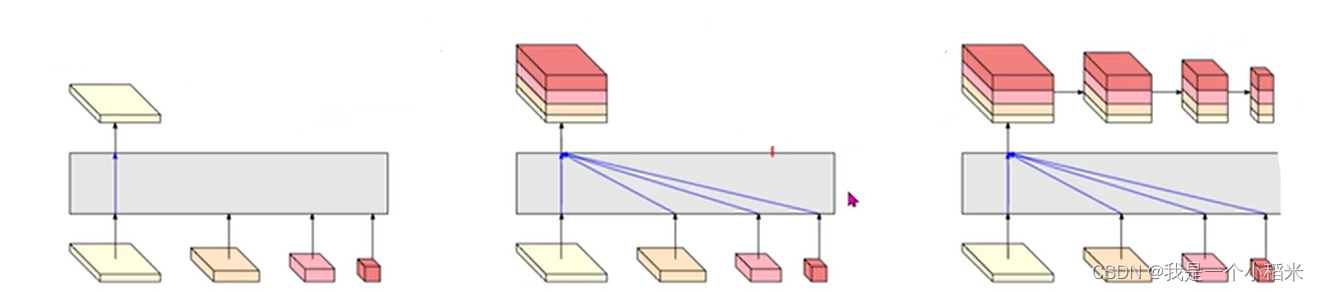
图一:
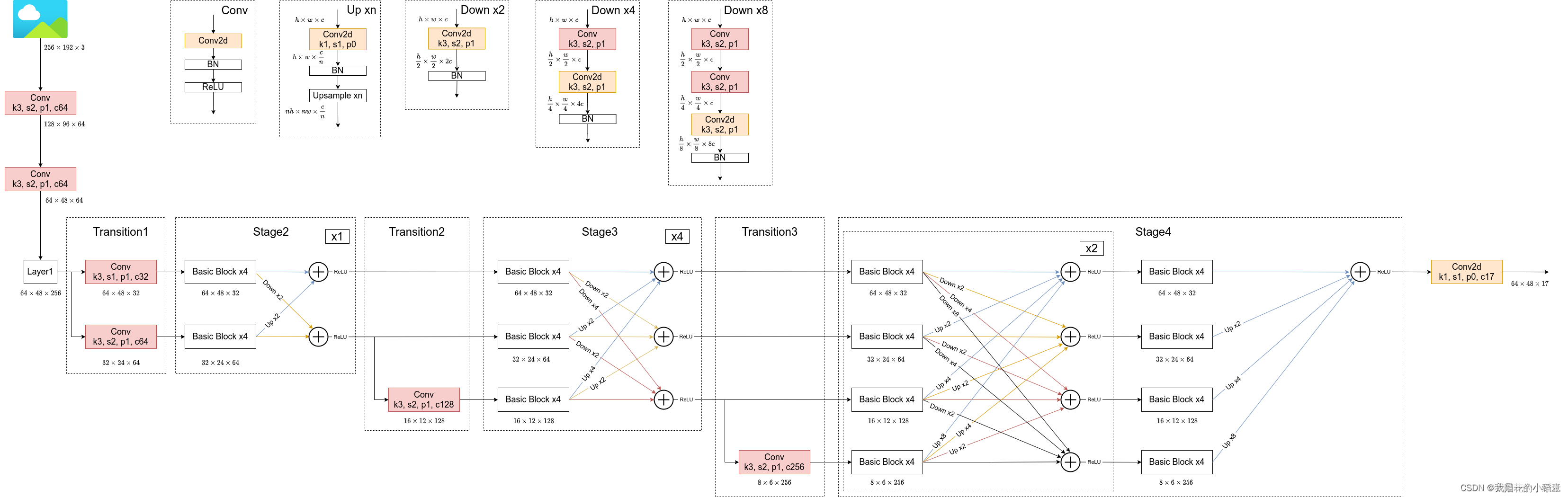
图二:(本文网络实现是依照图二,图一做通道数参考)
import paddle
from paddle import nn
from paddle.nn import initializer
from paddle.nn import functional as F
import numpy as np
参数
# BatchNorm2D动量参数__归一化时使用
BN_MOMENTUM = 0.2
不需要做操作的那些地方
# 占位符
# f(x) = x
class PlaceHolder(nn.Layer):
def __init__(self):
super(PlaceHolder, self).__init__()
def forward(self, inputs):
return inputs
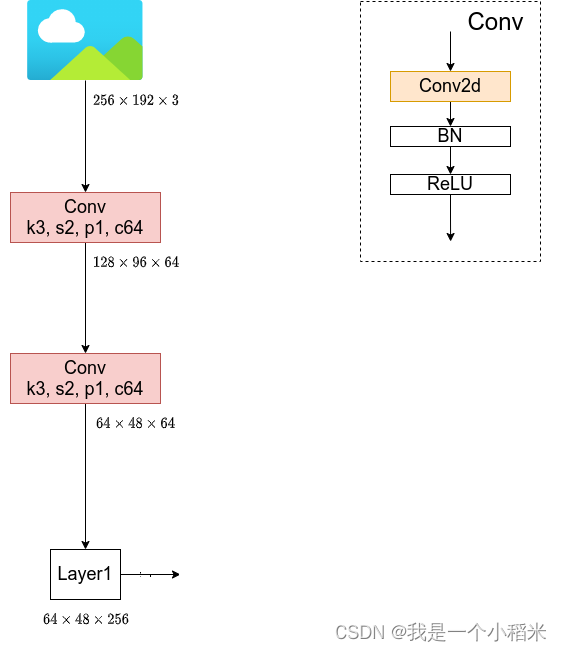
1. input输入层
对应结构如下图:
通用的3*3卷积核
class HRNetConv3_3(nn.Layer):
def __init__(self, inchannels,outchannels, stride=1, padding=0):
super(HRNetConv3_3, self).__init__()
self.conv = nn.Conv2D(inchannels, outchannels, kernel_size=3, stride=stride, padding=padding)
# BN的输入通道数等于卷积的输出通道数
self.bn = nn.BatchNorm2D(outchannels, momentum=BN_MOMENTUM)
self.relu = nn.ReLU()
# 前向传播
def forward(self, inputs):
x = self.conv(inputs)
x = self.bn(x)
x = self.relu(x)
return x
输入图像时进行的卷积操作
class HRNetStem(nn.Layer):
def __init__(self, inchannels,outchannels):
super(HRNetStem, self).__init__()
# 每经过一次卷积模块,图像的分辨率,也就是宽高,都降低1/2
self.conv1 = HRNetConv3_3(inchannels, outchannels, stride=2, padding=1) # (128, 96, 64)
self.conv2 = HRNetConv3_3(outchannels, outchannels, stride=2, padding=1) # (64, 48, 64)
def forward(self, inputs):
# (256, 192 ,3)
x = self.conv1(inputs) # (128, 96, 64)
x = self.conv2(x) # (64, 48, 64)
return x
网络输入层
class HRNetInput(nn.Layer):
def __init__(self, inchannels, outchannels, stage1_inchannels):
super(HRNetInput, self).__init__()
self.stem = HRNetStem(inchannels, outchannels)
self.in_change_conv = nn.Conv2D(outchannels, stage1_inchannels, kernel_size=1, stride=1, bias_attr=False)
self.in_change_bn = nn.BatchNorm2D(stage1_inchannels, momentum=BN_MOMENTUM)
self.relu = nn.ReLU()
def forward(self, inputs):
x = self.stem(inputs)
x = self.in_change_conv(x)
x = self.in_change_bn(x)
x = self.relu(x)
return x
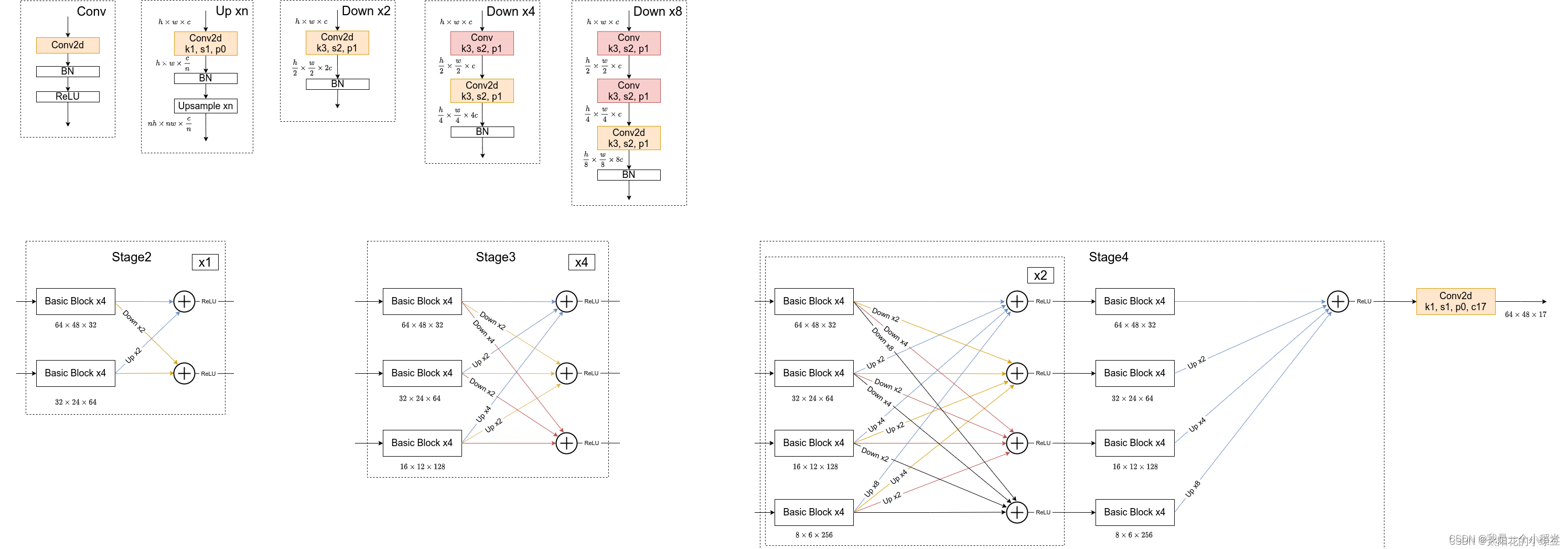
2. Stage网络层实现
普通block------两次卷积
class NormalBlock(nn.Layer):
def __init__(self, inchannels, outchannels):
super(NormalBlock, self).__init__()
self.conv1 = HRNetConv3_3(inchannels=inchannels, outchannels=outchannels, stride=1, padding=1)
self.conv2 = HRNetConv3_3(inchannels=outchannels, outchannels=outchannels, stride=1, padding=1)
def forward(self, inputs):
x = self.conv1(inputs)
x = self.conv2(x)
return x
残差block
class ResidualBlock(nn.Layer):
def __init__(self, inchannels, outchannels):
super(ResidualBlock, self).__init__()
self.conv1 = HRNetConv3_3(inchannels=inchannels, outchannels=outchannels, stride=1, padding=1)
self.conv2 = nb.Conv2D(outchannels, outchannels, kernel_size = 3, stride = 1, padding = 1)
self.bn2 = nn.BatchNorm2D(outchannels, momentum=BN_MOMENTUM)
self.relu = nn.ReLU()
def forward(self, inputs):
residual = inputs
x = self.conv1(inputs)
x = self.conv2(x)
x = self.bn2(x)
# 残差拼接
x+=residual
x = self.relu(x)
return x
branch_layer结构:

tostage_layers结构:

传入的是一个分支列表,经过处理后,返回的还是相同大小的分支列表
class HRNetStage(nn.Layer):
def __init__(self, stage_channels, block):
super(HRNetStage, self).__init__()
# 每个阶段串行结构的数量
self.stage_channels = stage_channels
# 并行结构的数量
self.stage_branch_num = len(stage_channels)
self.block = block
self.block_num = 4
self.stage_layers = self.create_stage_layers()
# 传进来的是多个分支,对每个分支做不同的操作
def forward(self, inputs):
outs = []
for i in range(len(inputs)):
x = inputs[i]
out = self.stage_layers[i](x)
outs.append(out)
return outs
def create_stage_layers(self):
# 保存并行的结构
tostage_layers = []
# 遍历每一个分支,构建串联的网路结构
for i in range(self.stage_branch_num):
# 保存串行的结构
branch_layer = []
for j in range(self.block_num):
# 每一个阶段的串行结构中加入block模块____模块中图像的通道数和分辨率没有改变
branch_layer.append(self.block(self.stage_channels[i], self.stage_channels[i]))
# 转换为线性层,而不是使用list
branch_layer = nn.Sequential(*branch_layer)
tostage_layers.append(branch_layer)
# 当前stage的branch layer集合
return nn.LayerList(tostage_layers)
3. Trans网络层实现

class HRNetTrans(nn.Layer):
def __init__(self, old_branch_channels, new_branch_channels):
super(HRNetTrans, self).__init__()
# [32, 64]
self.old_branch_channels = old_branch_channels
# [32, 64, 128]
self.new_branch_channels = new_branch_channels
# 2
self.old_branch_num = len(old_branch_channels)
# 3
self.new_branch_num = len(new_branch_channels)
# 生成一分支拓展以及跨分辨率融合的网络层
self.trans_layers = self.create_new_branch_trans_layers()
前向传播
def forward(self, inputs):
outs = []
for i in range(self.old_branch_num):
x = inputs[i]
out = []
for j in range(self.new_branch_num):
y = self.trans_layers[i][j](x)
out.append(y)
if len(outs) == 0:
outs = out
else:
for i in range(self.new_branch_num):
outs[i] += out[i]
return outs
def create_new_branch_trans_layers(self):
# 存放所有分支的转换层
totrans_layers = []
# 遍历旧的分支数量
for i in range(self.old_branch_num):
# 存放新的分支
branch_trans = []
# 遍历新的分支数量
for j in range(self.new_branch_num):
layer = []
inchannels = self.old_branch_channels[i]
# 如果如果旧分支id和新分支id相同时,是不进行任何操作的
if i==j:
layer.append(PlaceHolder())
# 如果i大于j,需要进行上采样,插值为几,就进行几次上采样
elif j<i:
# 如果i小于j,需要进行下采样,插值为几,就进行几次下采样
for k in range(i - j):
# 1*1 卷积改变通道数
layer.append(nn.Conv2D(in_channels=inchannels, out_channels=self.new_branch_channels[j], kernel_size=1, bias_attr=False))
# BN
layer.append(nn.BatchNorm2D(self.new_branch_channels[j], momentum=BN_MOMENTUM))
layer.append(nn.ReLU())
# 上采样
layer.append(nn.Upsample(scale_factor=2.))
inchannels = self.new_branch_channels[j]
else:
for k in range(j - i):
# 1*1 卷积改变通道数
layer.append(nn.Conv2D(in_channels=inchannels, out_channels=self.new_branch_channels[j], kernel_size=1, bias_attr=False))
layer.append(nn.BatchNorm2D(self.new_branch_channels[j], momentum=BN_MOMENTUM))
layer.append(nn.ReLU())
# 3*3 下采样
layer.append(nn.Conv2D(in_channels=self.new_branch_channels[j], out_channels=self.new_branch_channels[j], kernel_size=3, stride=2, padding=1, bias_attr=False))
# BN
layer.append(nn.BatchNorm2D(self.new_branch_channels[j], momentum=BN_MOMENTUM))
layer.append(nn.ReLU())
inchannels = self.new_branch_channels[j]
layer = nn.Sequential(*layer)
branch_trans.append(layer)
branch_trans = nn.LayerList(branch_trans)
totrans_layers.append(branch_trans)
# 返回值是 layer list
return nn.LayerList(totrans_layers)
4. Fuse 网络层实现
三种融合模式
# [1, 32, 64, 48]
# [1, 64, 32, 24]
# [1, 128, 16, 12]
# [1, 256, 8, 6]
Fusion_mode = ['keep', 'fuse', 'multi']
class HRNetFusion(nn.Layer):
def __init__(self, stage4_channels, mode = 'keep'):
super(HRNetFusion, self).__init__()
self.stage4_channels = stage4_channels
self.mode = mode
# 根据模式去构建融合层
self.fuse_layer = self.create_fuse_layers()
def forward(self, inputs):
x1, x2, x3, x4 = inputs
outs = []
if self.mode == Fusion_mode[0]:
out = self.fuse_layer(x1)
outs.append(out)
elif self.mode == Fusion_mode[1]:
out = self.fuse_layer[0](x1)
out += self.fuse_layer[1](x2)
out += self.fuse_layer[2](x3)
out += self.fuse_layer[3](x4)
outs.append(out)
elif self.mode == Fusion_mode[2]:
out1 = self.fuse_layer[0][0](x1)
out1 += self.fuse_layer[0][1](x2)
out1 += self.fuse_layer[0][2](x3)
out1 += self.fuse_layer[0][3](x4)
outs.append(out1)
out2 = self.fuse_layer[1](out1)
outs.append(out2)
out3 = self.fuse_layer[2](out2)
outs.append(out3)
out4 = self.fuse_layer[3](out3)
outs.append(out4)
return outs
def create_fuse_layers(self):
layer = None
if self.mode == 'keep':
layer = self.create_keep_fusion_layers()
elif self.mode == 'fuse':
layer = self.create_fuse_fusion_layers()
elif self.mode == 'multi':
layer = self.create_multi_fusion_layers()
return layer
# 第一种融合模式__直接输出
def create_keep_fusion_layers(self):
self.outchannels = self.stage4_channels[0]
return PlaceHolder()
# 第二种融合模式__聚合输出
def create_fuse_fusion_layers(self):
layers = []
# 通道数向最后一层分支转化
outchannels = self.stage4_channels[3]
for i in range(len(self.stage4_channels)):
inchannel = self.stage4_channels[i]
layer = []
if i != len(self.stage4_channels)-1:
layer.append(nn.Conv2D(in_channels=inchannel, out_channels=outchannels, kernel_size=1, bias_attr=False))
layer.append(nn.BatchNorm2D(outchannels, momentum=BN_MOMENTUM))
layer.append(nn.ReLU())
# 第几个分支就进行几次上采样,图像分辨率向第一个分支看齐
for j in range(i):
layer.append(nn.Upsample(scale_factor=2.))
layer = nn.Sequential(*layer)
layers.append(layer)
self.outchannels = outchannels
return nn.LayerList(layers)
# 第三种融合模式聚合多尺度输出
def create_multi_fusion_layers(self):
multi_fuse_layers = []
layers = []
# 通道数向最后一层分支转化
outchannels = self.stage4_channels[3]
for i in range(len(self.stage4_channels)):
inchannel = self.stage4_channels[i]
layer = []
if i != len(self.stage4_channels)-1:
layer.append(nn.Conv2D(in_channels=inchannel, out_channels=outchannels, kernel_size=1, bias_attr=False))
layer.append(nn.BatchNorm2D(outchannels, momentum=BN_MOMENTUM))
layer.append(nn.ReLU())
# 第几个分支就进行几次上采样,图像分辨率向第一个分支看齐
for j in range(i):
layer.append(nn.Upsample(scale_factor=2.))
layer = nn.Sequential(*layer)
layers.append(layer)
multi_fuse_layers.append(nn.LayerList(layers))
# 下采样
multi_fuse_layers.append(
nn.Sequential(
nn.Conv2D(outchannels, outchannels, kernel_size=3, stride=2, padding=1, bias_attr=False),
nn.BatchNorm2D(outchannels, momentum=BN_MOMENTUM),
nn.ReLU()
)
)
multi_fuse_layers.append(
nn.Sequential(
nn.Conv2D(outchannels, outchannels, kernel_size=3, stride=2, padding=1, bias_attr=False),
nn.BatchNorm2D(outchannels, momentum=BN_MOMENTUM),
nn.ReLU()
)
)
multi_fuse_layers.append(
nn.Sequential(
nn.Conv2D(outchannels, outchannels, kernel_size=3, stride=2, padding=1, bias_attr=False),
nn.BatchNorm2D(outchannels, momentum=BN_MOMENTUM),
nn.ReLU()
)
)
return nn.LayerList(multi_fuse_layers)
5. 检验网络输入输出
class TestNet(nn.Layer):
def __init__(self):
super(TestNet, self).__init__()
self.input = HRNetInput(3, outchannels=64, stage1_inchannels=32)
self.stage1 = HRNetStage([32], NormalBlock)
self.trans1 = HRNetTrans([32], [32, 64])
self.stage2 = HRNetStage([32, 64], NormalBlock)
self.trans2 = HRNetTrans([32, 64], [32, 64, 128])
self.stage3 = HRNetStage([32, 64, 128], NormalBlock)
self.trans3 = HRNetTrans([32, 64, 128], [32, 64, 128, 256])
self.stage4 = HRNetStage([32, 64, 128, 256], NormalBlock)
self.fuse_layer = HRNetFusion([32, 64, 128, 256], 'multi')
def forward(self, inputs):
x = self.input(inputs)
x = [x]
x = self.stage1(x)
x = self.trans1(x)
x = self.stage2(x)
x = self.trans2(x)
x = self.stage3(x)
x = self.trans3(x)
x = self.stage4(x)
x = self.fuse_layer(x)
return x
if __name__ == '__main__':
model = TestNet()
data = np.random.randint(0, 256, (1, 3, 256, 192)).astype(np.float32)
data = paddle.to_tensor(data)
y = model(data)
for i in range(len(y)):
print(y[i].shape)

总结:
- 如果是分类任务,用最后一个特征图
- 如果是比较敏感的,那么用高分辨率的特征图