一、准备工作
1、首先明确实验目的:
·总的来说就是让我们补充位于tsh.c中的七个函数,从而实现一个支持任务功能的shell。
因此在这儿将这七个函数分为两部分:
(1)实现完成内建命令(jobs、fg、bg、kill)的四个函数:

接着再来了解一下tsh支持的四个内置命令:
·Quit:命令终止tsh进程
·jobs:命令列出所有后台进程
·bg:命令会向作业发送SIGCNOT信号来重启job,并作为后台作业运行,参数可以是PID或JID
·fg:同上,唯一区别是job以前台作业运行
(2)实现三个信号(SIGCHLD、SIGINT、SIGTSTP)的处理函数:
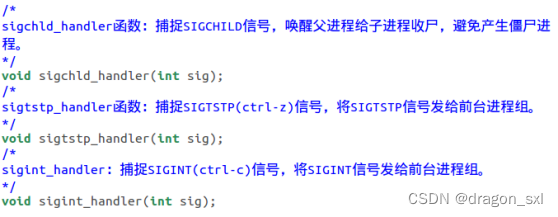
· 因此我们再来具体了解一下这三个信号:

· 再来了解一下需要用到的辅助函数:
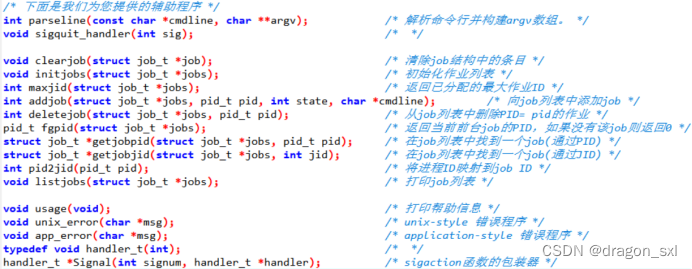
2、了解实验资源:

以上文件中,我们要实现的七个函数均在tsh.c中,tshref是参考文件。图中的txt文件均是测试文件。
3、如何比对我们实现的同时是否正确:
(1)首先执行make指令编译tsh.c得到可执行文件tsh:


(2)然后就执行make rtest01 ;make test01进行比对,如果我们的执行结果与参考结果一致,则实现正确,如下:

否则不正确,如下:
(输出不一致,说明功能未成功实现)
二、具体实现
-
trace01 -> 正确终止EOF:

可成功运行。
2.trace 02 ->实现内置的quit
- 分析 :
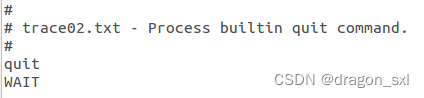
trace02.txt文件中只有quit,WAIT两条命令。
先执行看看:

可以看到无法正常终止,因为tsh的quit内置命令还未编写,所以不能正常退出。
因此需要我们实现终止命令(quit。
(2)实现之前我们来了解eval()与execve()执行流程和fork()多进程运行方式:
程序会首先执行 eval(),在 eval中进行判断(使用buildin_cmp()函数),如果发现命令不是内置命令,则会调用 fork()函数来新建一个子进程,在子进程中调用 execve()函数通过 argv[0]来寻找路径,并在子进程中运行路径中的可执行文件,如果找不到可执行文件,则说明命令为无效命令,输出命令无效,并用 exit(0)结束该子进程即可。
(3)实现quit:
·补齐文件tsh.c中的函数eval()函数和函数builtin_cmd()与quit相关的部分。
· 实现思路:首先从命令中提取参数,然后判断是否为内置命令,如果为内置命令,则直接在当前进程执行即可;如果不是内置命令,则需要新建一个子进程,并利用 execve 来通过参数给出的路径寻找出可执行文件并在子进程中执行,如果找不到该可执行文件,则输出命令未找到,并结束子进程。
· 代码:
- 首先是eval函数:

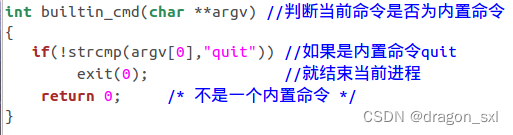
2.然后是判断是否为内置命令的函数builtin_cmd():
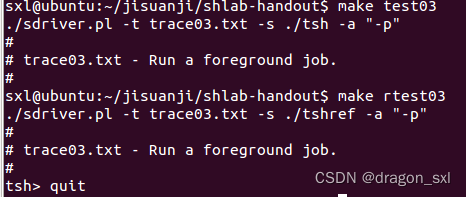
(4)验证:因为tset03功能是运行一个前台job,并且也是以quit终止,因此一起验证:
可以看出,成功!


3 . trace04 -->实现eval()的后台作业(BK job)管理功能
(1)思路:
·在原有的eval函数基础之上添加将作业添加至后台作业管理的函数使用(addjobs())。
·加以信号的阻塞和取消阻塞。
***(注意)
那为什么在这里要控制信号的阻塞呢?
答:总的来说,为了保证处理程序回收终止的子进程(delete job)在父进程(addjob)之后进行,否则父子进程之间会出现经典的同步错误---竞争。
详细理解:因为当父进程创建一个子进程时,它就会将这个子进程添加到作业列表(addjobs)。当父进程在SIGCHLD处理程序中回收一个僵尸子进程时,就要从作业列表中删除子进程。理想状态下,这个过程很正确,但是往往真实的运行情况下,会出现问题,如下图:

总结来说,就是会出现在addjob之前调用deletejob,导致出错。
***
(2)具体实现:
1.首先使用一个标记符号(bg):
![]()
2.因为要分析传入指令是否要在后台执行进程,因此要补充分析命令的函数builtin_cmd():

3.接着在eval中进行判断是否为后台进程:
![]()
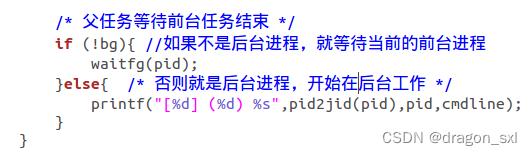
4.再将waitfg()函数补充完整:
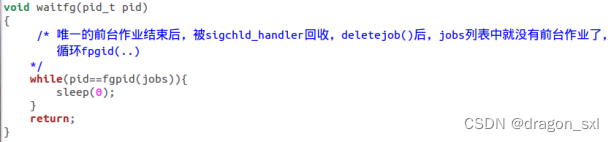
让父进程正确地等待。
5.接下来实现信号的控制,这里使用sigprocmask()函数显式地阻塞和取消阻塞:
(1)初了解:

(2)在eval()中的使用:
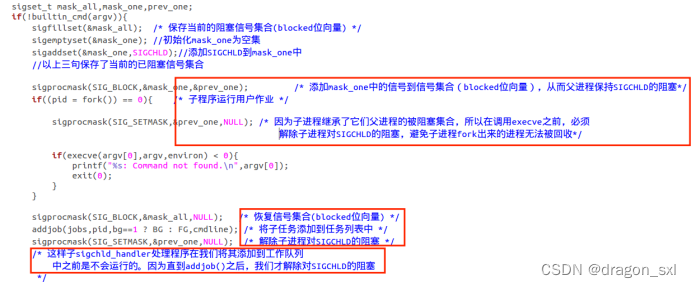
上述图片的操作中,我们就保证了父进程先addjob(),然后子进程再deletejob();
6.接下来实现对应的sigcld_handler()以释放僵尸的子进程:
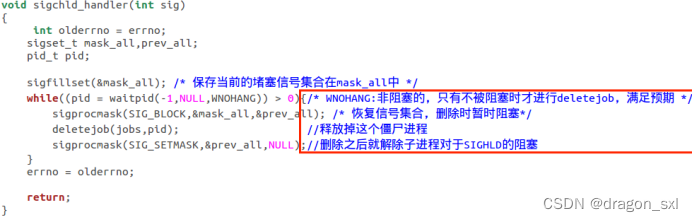
详情看红框操作。
综上,我们的addjobs就成功实现了!
7.验证:

通过!
4. trace05 -->处理jobs内置命令:
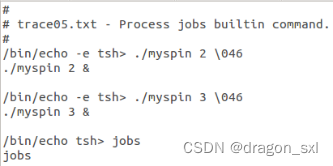
(1)思路:直接调用自带的listjobs()方法,就是在原有builtin_cmd函数中添加一个判断函数,如果参数是jobs,则执行listjobs函数的功能(即将所有的作业打印出来)。
(2)实现:

(3)测试:
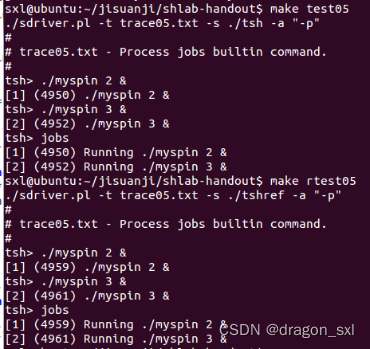
成功!
5.trace06、trace07 ->处理SIGINT信号
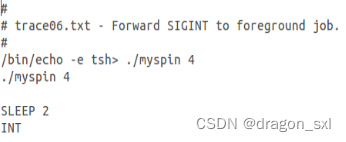

(1)目的:
要实现的功能是:trace06->将SIGINT信号转发到前台作业;
trace07->仅仅将SIGINT信号转发到前台作业;
因此这里放在一起实现。
SIGINT:来自键盘的中断(ctrl+c)。
(2)文档提示:

综上,就是说要保证ctrl+c只会终止你当前的shell进程,而不会影响其他进程。
(3)实现:
根据文档中的解决方法,我们来一步步实现。
1.首先更改一下eval函数,在其中调用setpgid(0,0):
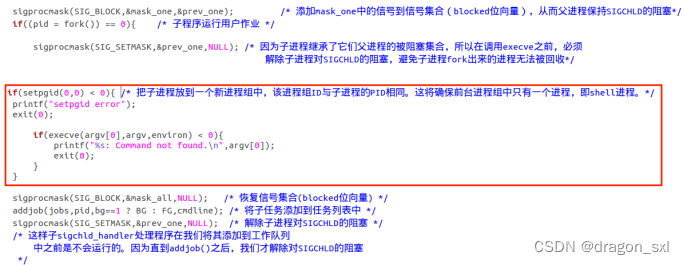
添加了红框中的代码,解释也在注释中。
2.更改信号处理函数sigint_handler(),实现转发到前台作业的操作(包含前台作业的进程组)

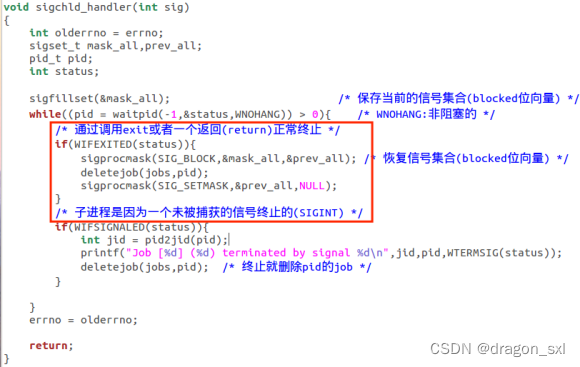
3.还要修改sigchld_handler()函数:
****
为什么呢?
答:是为了区分进程终止的原因(符合测试文件)(后边也会用到)
1.是正常终止(exit或return)
2.还是因为收到其他信号如:SIGINT而终止。(这里我们是收到SIGINT信号终止的)
****
修改如下:
综上,就成功实现!
(4)测试:
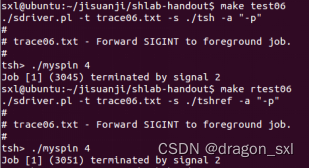
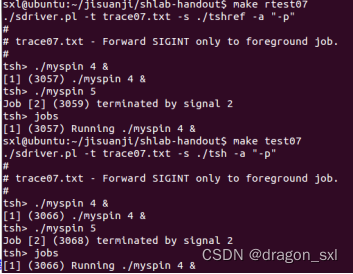
成功!
6、Trace08 -> 仅仅将SIGSTP(ctrl+z)转发到前台作业(与上一题实现大同小异)
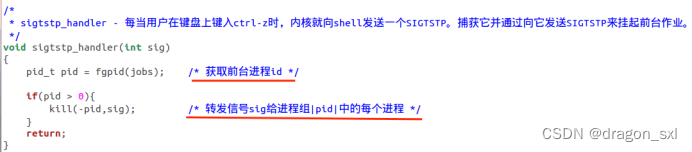
(1)因此我们就直接实现其信号处理函数sigtstp_handler():
(2)依旧来修改一下sigchld_handler()函数。区分终止/停止。
思路:因此在上一题的基础上加上对于SIGTSTP(ctrl+z)的判断和信息显示。
如下:

·加了红框框的内容,实现。
·还要加多一个WUNTRACED(见绿框),变成WNOHANG | WUNTRACED。
***
为什么呢?
WNOHANG:挂起调用进程,直到有子进程终止。
WUNTRACED:挂起调用进程,直到等待集合中的一个进程变成已终止或者被停止。
WNOHANG | WUNTRACED:等待集合中的子进程都没有被停止或终止,则返回值为0;如果有一个停止或终止,则返回值为该子进程的PID。
可以理解为WNOHANG接收终止,WUNTRACED接收停止。
两个合在一起就是接收终止和停止(ctrl+z和ctrl+c)。
***
(3)测试:

成功!
7.trace 09 ---> 实现进程内置命令bg
bg <job>:命令会向一个已经停止的job发送SIGCNOT信号来重启这个job,并作为后台作业运行,参数可以是PID或JID。
(1)首先是完成识别命令:
要将bg命令添加到识别命令的函数builtin_cmd()中:

(2)接下来实现其处理函数:
·修改do_bgfg()方法:

(3)测试:
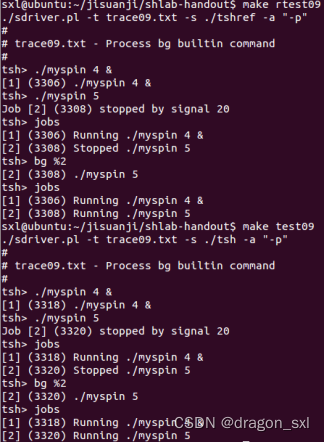
成功!
8 .trace 10 ---> 实现进程内置命令fg(与上一题差不多)
fg <job>:将一个已停止或正在运行的后台作业更改为正在前台运行的作业。
(1)老方法,先往builtin_cmd()方法添加内容:
(2)然后往do_bgfg()函数中加入相关处理:
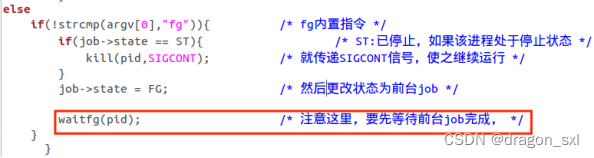
需要注意的一点就是红框所圈的内容,也是与BG实现区别的地方。
(3)测试:
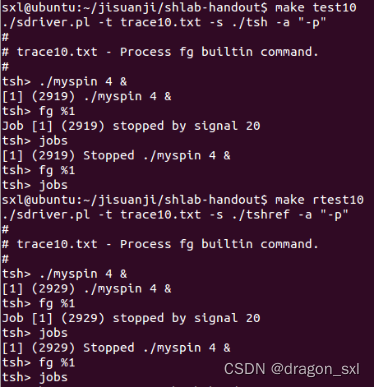
成功!
9 .trace 11 ---> 将SIGINT转发给前台进程组中的每个进程
trace 12 ----> 将SIGSTP转发给前台进程组中的每个进程
这两个实验在之前的trace06-trace07的分析中已经实现了,因此我们直接执行即可:
(1)sigint_handler()函数:

(2)sigtstp_handler()函数:

(3)测试:

成功!
10.trace13 -->重新启动进程组中每个已经停止的进程
- 首先回顾一下我们之前有关唤醒进程的操作:
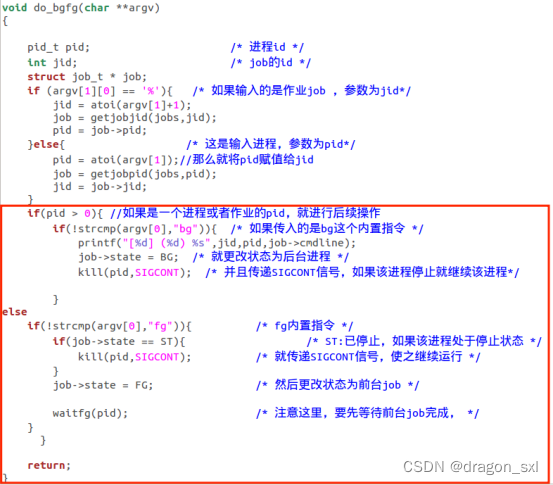
在trace09和trace10中对BG和FG的处理中(do_bgfg()函数),我们是有条件地唤醒进程,并将之修改为对应需要的状态(前台或后台),如下图:
继续分析:
· 因为此时需要唤醒所有停止的进程,因此要将唤醒函数kill(pid,SIGCONT)的第一个参数改为-pid,因为当其第一个参数<0时,kill就会将SIGCONT信号传递给整个进程组。
· 因为在FG中,有一步是需要等待当前的前台进程完成之后,才会唤醒进程组中的进程,所以为了保证唤醒所有进程,就要去掉FG中,job->state == ST才传递SIGCONT信号的判断,因为当前运行进程可能没有停止(ST),但是进程组中是有停止的,进程组中停止的这些也需要被唤醒。
(2)综上,我们得到以下实现:

(3)测试:
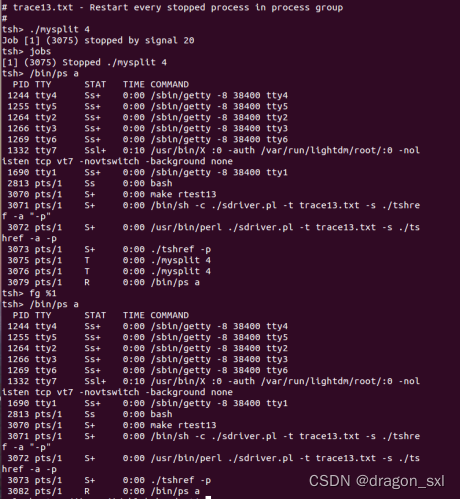
成功!
11.trace14- 简单的错误处理(就是处理输入未实现的命令、fg、bg参数不正确等错误情况)
(1)先运行看看怎么处理:

从上图看出一共有五种处理方式,因此我们在do_bgfg()中进行对应的处理即可。
(2)处理:
·第一个错误:Command not found,未实现的命令。
我们再次回顾一下shell的执行流程:程序会首先执行 eval(),在 eval中进行判断(使用buildin_cmp()函数),如果发现命令不是内置命令,则会调用 fork()函数来新建一个子进程,在子进程中调用 execve()函数通过 argv[0]来寻找路径,并在子进程中运行路径中的可执行文件,如果找不到可执行文件,则说明命令为无效命令。因此我们在此处加入输出语句即可,如下图:
· 第二个错误是:fg command requires PID or %jobid argument,fg命令时没有传入pid或jid。
因此在do_bgfg()中实现:

·第三个错误是:fg: argument must be a PID or %jobid,传入了pid或jid,但是不符合规范(pid或jid必须为数字)。
处理:

·第四个错误是:No such process,通过传入的pid找不到对应的作业(job=null)
处理:

·第五个错误:No such job,通过传入的jid找不到对应的job(job=null)
此外,我们发现还有一行(绿色框所圈),这里我们和trace15
一起解决。所以接下来看一下trace15.
12. trace15-->所有命令一起运行
(1)先make rtest一下,看看缺什么:
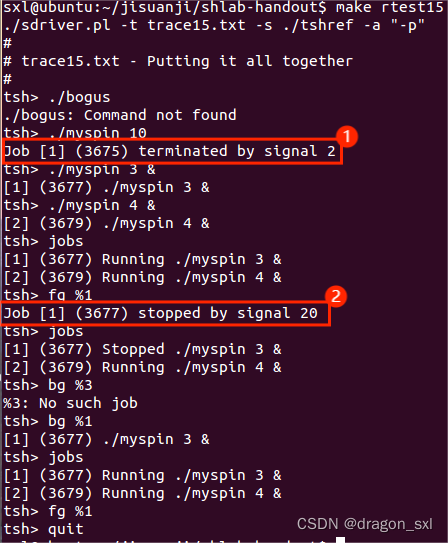
如上图,缺少这两条消息的处理,因此我们要加上处理:
那么首先查看一下文件trace15.txt,看看是因为什么信号出现这种情况:
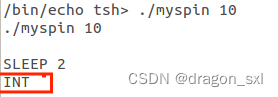 可以看到,INT信号将job10终止。
可以看到,INT信号将job10终止。
 TSTP信号将job1中断。
TSTP信号将job1中断。
因此我们就在终止信号处理函数sihchld_handler()中进行判断处理,并输出上述错误信息:
处理:


OK,完成!
(3)测试:
Trace14:

成功!
Trace15(测试所有命令):
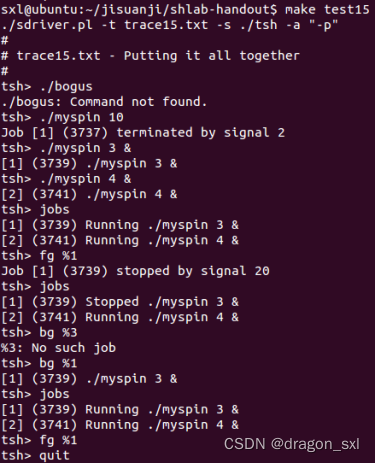
成功!
13. trace16 -->测试shell是否能够处理来自其他进程而不是终端的SIGTSTP和SIGINT信号。
(1)查看一下trace16.txt:

可以看到测试文件的操作是:
测试shell能否处理来自mystop和myint的SICINT和SINTSTP信号。
(2)测试:
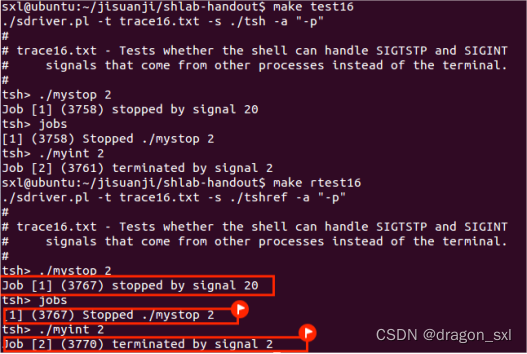
分析:可以看到上图中小旗帜标识的位置,在jobs执行内置命令之后,对于SIGINT和SINTSTP信号均做出了处理。成功!
ps:trace16其实还有点不太清楚。
最后贴上所有代码:
void eval(char *cmdline) //加载且执行命令
{
char *argv[MAXARGS]; /* 参数列表execve() */
char buf[MAXLINE]; /* 保存修改的命令行 */
int bg; /* 这个作业应该在后台进行? */
pid_t pid; /* 进程id*/
strcpy(buf,cmdline);
bg = parseline(buf,argv);
if(argv[0] == NULL)
return; /* 忽略空命令 */
sigset_t mask_all,mask_one,prev_one;
if(!builtin_cmd(argv)){
sigfillset(&mask_all); /* 保存当前的阻塞信号集合(blocked位向量) */
sigemptyset(&mask_one); //初始化mask_one为空集
sigaddset(&mask_one,SIGCHLD);//添加SIGCHLD到mask_one中
//以上三句保存了当前的已阻塞信号集合
sigprocmask(SIG_BLOCK,&mask_one,&prev_one); /* 添加mask_one中的信号到信号集合(blocked位向量),从而父进程保持SIGCHLD的阻塞*/
if((pid = fork()) == 0){ /* 子程序运行用户作业 */
sigprocmask(SIG_SETMASK,&prev_one,NULL); /* 因为子进程继承了它们父进程的被阻塞集合,所以在调用execve之前,必须
解除子进程对SIGCHLD的阻塞,避免子进程fork出来的进程无法被回收*/
if(setpgid(0,0) < 0){ /* 把子进程放到一个新进程组中,该进程组ID与子进程的PID相同。这将确保前台进程组中只有一个进程,即shell进程。*/
printf("setpgid error");
exit(0);
}
if(execve(argv[0],argv,environ) < 0){
printf("%s: Command not found.\n",argv[0]);
//第一个错误处理,直接在这里进行提示信息输出
exit(0);
}
}
sigprocmask(SIG_BLOCK,&mask_all,NULL); /* 恢复信号集合(blocked位向量) */
addjob(jobs,pid,bg==1 ? BG : FG,cmdline); /* 将子任务添加到任务列表中 */
sigprocmask(SIG_SETMASK,&prev_one,NULL); /* 解除子进程对SIGCHLD的阻塞 */
/* 这样子sigchld_handler处理程序在我们将其添加到工作队列
中之前是不会运行的。因为直到addjob()之后,我们才解除对SIGCHLD的阻塞
*/
/* 父任务等待前台任务结束 */
if (!bg){ //如果不是后台进程,就等待当前的前台进程
waitfg(pid);
}else{ /* 否则就是后台进程,开始在后台工作 */
printf("[%d] (%d) %s",pid2jid(pid),pid,cmdline);
}
}
return;
}/*
* builtin_cmd - If the user has typed a built-in command then execute
* it immediately.
*/
int builtin_cmd(char **argv) //判断当前命令是否为内置命令
{
if(!strcmp(argv[0],"quit")) //如果是内置命令quit
exit(0); //就结束当前进程
if(!strcmp(argv[0],"jobs")){ /* jobs内置指令 */
listjobs(jobs);
return 1;
}
if(!strcmp(argv[0],"&")) /* 忽略单& */
return 1; //然后返回1,因为如果一个命令以&结尾,shell应该在后台运行它,否则在前台运行;
if(!strcmp(argv[0],"bg")){ /* bg内置指令 */
do_bgfg(argv);
return 1;
}
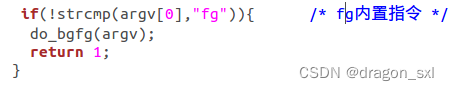
if(!strcmp(argv[0],"fg")){ /* fg内置指令 */
do_bgfg(argv);
return 1;
}
return 0; /* 不是一个内置命令 */
}void do_bgfg(char **argv)
{
pid_t pid; /* 进程id */
int jid; /* job的id */
struct job_t * job;
if (argv[1] == NULL){
printf("%s command requires PID or %%jobid argument\n",argv[0]);
return;
}
//第二个错误是没有传入pid或者jid(为空),就报错并返回
if (argv[1][0] == '%'){ /* 如果输入的是jid(作业) */
if(argv[1][1] < '0' || argv[1][1] >'9'){
printf("fg: argument must be a PID or %%jobid\n");
return;
}
//第三个错误命令是传入了,但是传入的数据不是不符合pid或jid的规范(输入必须为数字)
//在这里判断并输出错误信息:fg: argument must be a PID or %%jobid\n
jid = atoi(argv[1]+1);
job = getjobjid(jobs,jid);//通过jid找到需要执行的job
if(job == NULL){
printf("%%%d: No such job\n",jid);
return;
}
//第四个错误就是通过jid找到的job==null,因此“NO such job”
pid = job->pid;
}else{ /* 给的是pid */
if(argv[1][0] < '0' || argv[1][0] >'9'){
printf("bg: argument must be a PID or %%jobid\n");
return;
}
pid = atoi(argv[1]);
job = getjobpid(jobs,pid);
if(job == NULL){
printf("(%d): No such process\n",pid);
return;
}
//第五个错误就是通过jid找到的job==null,因此“NO such job”
jid = job->jid;
}
if(pid > 0){
if(!strcmp(argv[0],"bg")){ /* bg内置指令 */
printf("[%d] (%d) %s",jid,pid,job->cmdline);
job->state = BG; /* 更改状态 */
kill(-pid,SIGCONT); /* 传递SIGCONT信号给进程组中的所有进程 */
}else
if(!strcmp(argv[0],"fg")){ /* fg内置指令 */
job->state = FG; /* 更改状态 */
kill(-pid,SIGCONT); /* 传递SIGCONT信号给进程组中的所有进程 */
waitfg(pid); /* 等待前台job完成 */
}
}
return;
}/*
* waitfg - 阻塞,直到进程的pid不再是前台进程
*/
void waitfg(pid_t pid)
{
/* 唯一的前台作业结束后,被sigchld_handler回收,deletejob()后,jobs列表中就没有前台作业了,
循环fpgid(..)
*/
while(pid==fgpid(jobs)){
sleep(0);
}
return;
}/*
* sigchld_handler - 每当子作业终止(变成僵尸),或者因为收到SIGSTOP或SIGTSTP信号而停止时,
* 内核就向shell发送SIGCHLD。该处理程序获取所有可用的僵尸子进程,
* 但不等待任何其他当前运行的子进程终止。
*/
void sigchld_handler(int sig)
{
int olderrno = errno;
sigset_t mask_all,prev_all;
pid_t pid;
int status;
sigfillset(&mask_all); /* 保存当前的信号集合(blocked位向量) */
while((pid = waitpid(-1,&status,WNOHANG | WUNTRACED)) > 0){ /* WNOHANG:非阻塞的 */
/* 通过调用exit或者一个返回(return)正常终止 */
if(WIFEXITED(status)){
sigprocmask(SIG_BLOCK,&mask_all,&prev_all); /* 恢复信号集合(blocked位向量) */
deletejob(jobs,pid);
sigprocmask(SIG_SETMASK,&prev_all,NULL);
}
/* 子进程是因为一个未被捕获的信号终止的(SIGINT) */
if(WIFSIGNALED(status)){
int jid = pid2jid(pid);
printf("Job [%d] (%d) terminated by signal %d\n",jid,pid,WTERMSIG(status));
deletejob(jobs,pid);/* 终止就删除pid的job */
}
/* 引起返回的子进程当前是停止的(SIGTSTP) */
if(WIFSTOPPED(status)){
struct job_t * job = getjobpid(jobs,pid);
int jid = pid2jid(pid);
printf("Job [%d] (%d) stopped by signal %d\n",jid,pid,WSTOPSIG(status));
job->state = ST; /* 状态设为停止(ST) */
}
}
errno = olderrno;
return;
}
/*
* sigint_handler - 当用户在键盘上键入ctrl-c时,内核向shell发送一个SIGINT。抓住它并把它发送到前台工作。
*/
void sigint_handler(int sig)
{
pid_t pid = fgpid(jobs); /* 获取前台进程id */
if(pid > 0){
kill(-pid,sig); /* 转发信号sig给进程组|pid|中的每个进程 */
}
return;
}
/*
* sigtstp_handler - 每当用户在键盘上键入ctrl-z时,内核就向shell发送一个SIGTSTP。捕获它并通过向它发送SIGTSTP来挂起前台作业。
*/
void sigtstp_handler(int sig)
{
pid_t pid = fgpid(jobs); /* 获取前台进程id */
if(pid > 0){
kill(-pid,sig); /* 转发信号sig给进程组|pid|中的每个进程 */
}
return;
}