第一波特率和第二波特率的配置
通过“CanControllerBauderateConfig”中的“CanControllerFdBauderateConfg”来配置第二个波特率,也就是报文payload和CRC段传输的波特率。以EB Tresos举例
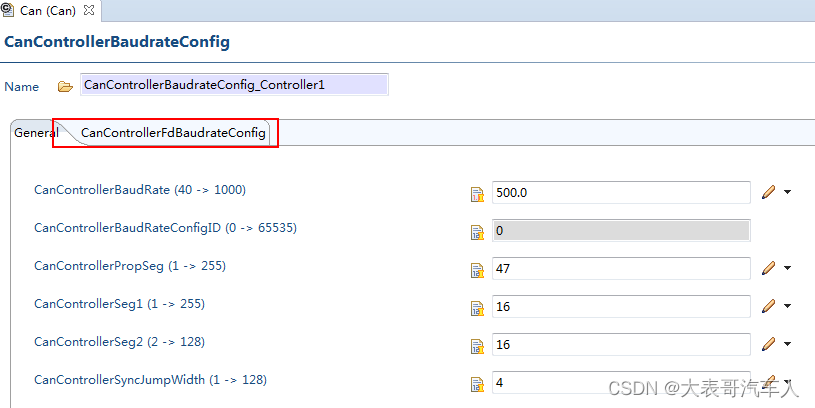
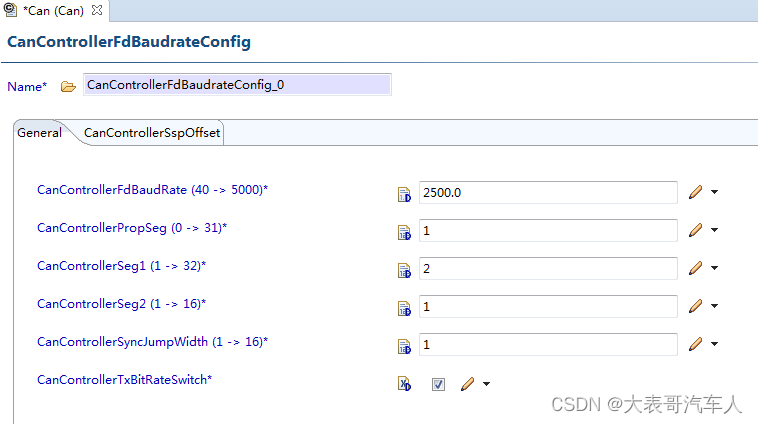
如果该波特率配置中有CANFD配置(CanControllerFdBaudrateConfig),那么CANFD功能是使能的。
需要指定的第二波特率来支持接收带有BRS(Bit Rate Switch)的CAN FD帧。是否第二波特率用于发送取决于配置参数CanControllerTxBitRateSwitch。(如下图配置)


交替发送CAN和CANFD报文
但是,在某些情况下,传统的CAN 2.0报文可能需要在支持CAN-FD报文的网络中传输,例如为了方便CAN选择性唤醒。在这些情况下,有必要支持交错传输CAN-FD报文和传统CAN报文。
这可以通过使用Can_Write期间传递的CanId的两个最高有效位(参见Can_IdType,SWS_Can_00416)来实现,以指示应发送那种类型的报文。

扩展payload的发送支持
CANFD同样支持扩展payload发送最多64个字节。因此,如果CAN控制器处于CAN FD
模式(有效的CanControllerFdBaudrateConfig)和CAN FD标志在CanId中被置位并传递给Can_Write(),CanDrv支持传输长度高达64字节的PDU。如果有传输CAN FD帧的请求,且CAN控制器不在 CAN FD 模式下(没有 CanControllerFdBaudrateConfig),报文帧发送为传统CAN帧,只能发送PDU长度<= 8字节。
