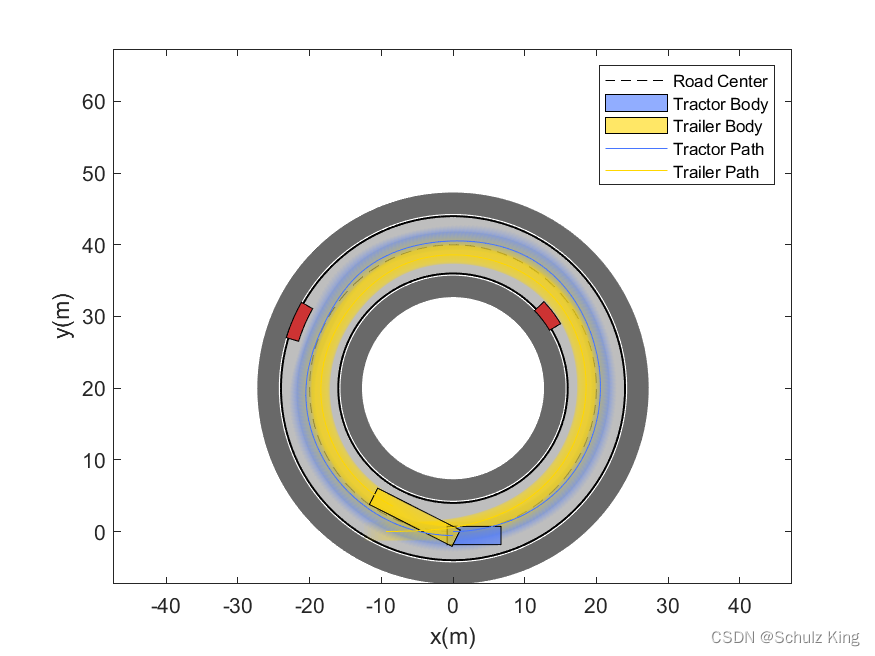
Tractor-Trailer是多刚体,强非线性系统,Trailer的运动轨迹是跟随运动,是由Tractor的轨迹决定的,如下图所示,Trailer和Tractor的行驶轨迹不同,因此在进行路径规划时,既要考虑Tractor的位姿,也需要考虑Trailer的位姿。
1. 规划方法
1.1 搜索方法
典型的搜索方法是Hybrid A*,需要对原始的Hybrid A*进行改进。在控制采样的过程中需要计算Trailer的姿态。此外当对Tractor-Trailer的末端时刻状态进行约束时,常规的RS曲线和Dubins曲线是基于car-like model的,因此需要对此进行改进。由于是采样搜索,是不完备的,其是否有可行解、求解时间和控制采样密度相关。并且此方法显然不适用与结构化道路。
2.2 优化方法
目前典型的最优化方法的路径规划,例如Apollo,可以利用道路中心线,快速求解。最优化方法可以方便的对任何位置施加约束。因此可以采用最优化方法求解Tractor-Trailer路径规划问题。
2. 问题模型
使用最优化方法进行路径规划时要考虑以下几个问题:
2.1 运动学约束
Tractor-Trailer的运动学公式如下:
{ x ˙ = v cos φ y ˙ = v sin φ φ ˙ = v l tan δ λ ˙ = v l 2 ( − s i n λ − d l 1 c o s λ t a n δ ) − v l 1 t a n δ (2-1) \begin{cases} \dot{x} =v \cos{\varphi} \\ \dot{y} = v \sin{\varphi} \\ \dot{\varphi} = \frac{v}{l}\tan{\delta} \\ \dot{\lambda} = \frac{v}{l_2}(-sin{\lambda} - \frac{d}{l_1}cos{\lambda}tan{\delta}) - \frac{v}{l_1}tan{\delta} \end{cases} \tag{2-1} ⎩⎪⎪⎪⎨⎪⎪⎪⎧x˙=vcosφy˙=vsinφφ˙=lvtanδλ˙=l2v(−sinλ−l1dcosλtanδ)−l1vtanδ(2-1)
2.2 无碰撞约束
Tractor和Trailer都必须在无碰撞区域。
2.3 Two point约束
规划起点和终点的约束。
2.4 边界约束
各个优化变量的上下限约束。
3. 问题求解
由于约束是强非线性的,如果采用非线性求解器求解很难达到实时性要求,可以线性化后使用线性二次规划求解。
3.1 QP求解
由于进行了线性化引进了误差,会使求解结果不正确,例如下图Trailer会扫到第一个障碍物。
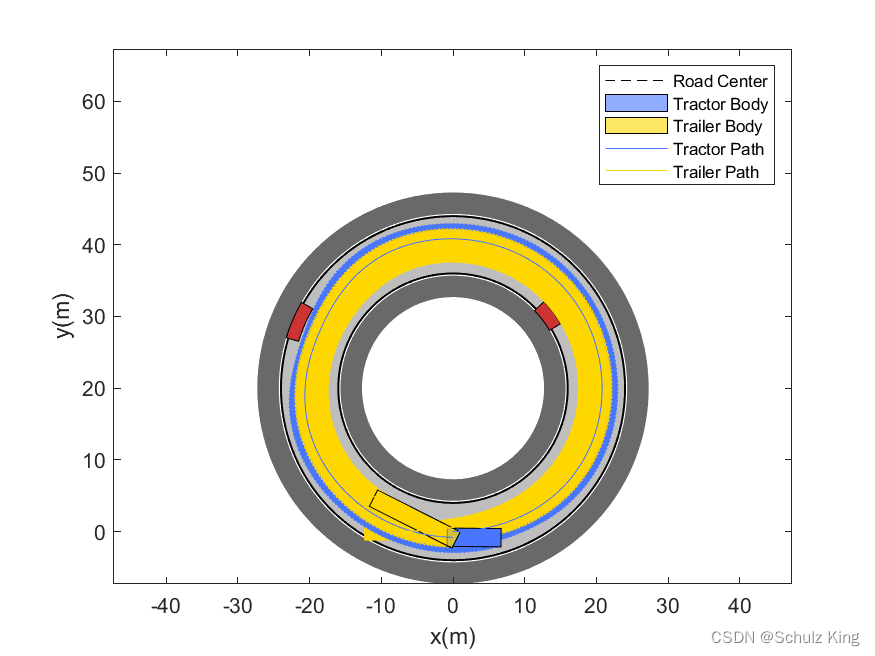
3.1 SQP求解
SQP是解决非线性规划的一种方法,如下图所示,可以避开所有障碍物。但SQP会增加求解时间。