一、语义相关
1)DA-RNN_Semantic Mapping with Data Associated

特殊之处:相对于FCN而言,将获取的语义信息投影到Kinect地图里 获取3D的地图
一般的语义分割都是图像形态 没有定位信息,这个有相对的三维位置关系
仪器:Kinect 需要深度图
软件:cuda tensorflow 有训练好的model供下载 Python
2)SemanticFusion: Dense 3D Semantic Mapping with Convolutional Neural Networks
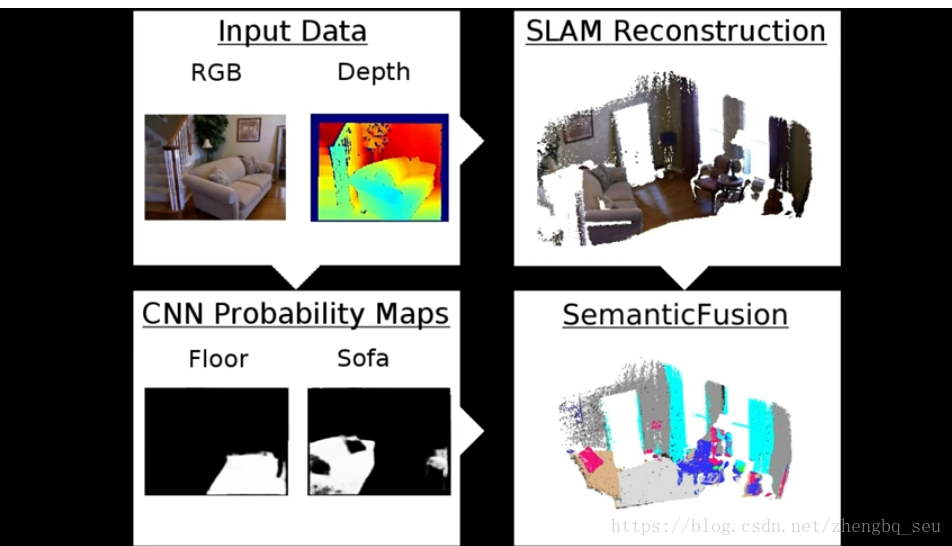
用了ElasticFusion和caffe合成,实现了三维场景的语义分割,(YouTube的视频展示了它可以回环检测,畸形的椅子正常了,不知道是它的创新还是Elastic本身自带)
仪器:Elastic本身需要Kinect深度图
软件:caffe 有训练好的model供下载
3)Pop-up SLAM: Semantic Monocular Plane SLAM for Low-texture Environments


好像用LSD SLAM的双目图像 得到深度信息 然后直接构建三维环境(反正是低纹理地区 很好建)
在低纹理条件下(这里可能已经是3D图了?)提取边界线,然后选择地线(这个例子里面分割出地面和门 ) 然后构建三维建模 感觉只适用于室内的没什么杂物的环境内,规格化场景可以使用。
4)pointnet
点云 纯神经网络 将散乱点云识别出一个个物体
二、SLAM资源库
http://www.slamcn.org slamcn 中文SLAM小社区
【泡泡机器人福利】机器人顶级会议源代码链接大放送!(实时更新)机器人顶级会议中,不乏很多配套的优秀开源代码
三、语义相关 语义分割 目标识别
2)https://github.com/karolmajek/Mask_RCNN 4K Mask RCNN COCO Object detection and segmentation #2
3)https://github.com/TobyPDE/FRRN 用于街景语义分割的全分辨率残差网络(CVPR-12)