网络介绍
在语义分割的时候需要得到一个高分辨率的heatmap进行关键点的检测。获取高分辨率的方式一般是采用先降分辨率再升分辨率的方法,例如U-Net,SegNet,DeconvNet,Hourglass。这些网络的一个特点是将不同的分辨率进行串联。
与上述Net不同的是,HRNet并联了不同分辨率,并添加不同分辨率之间的交互。
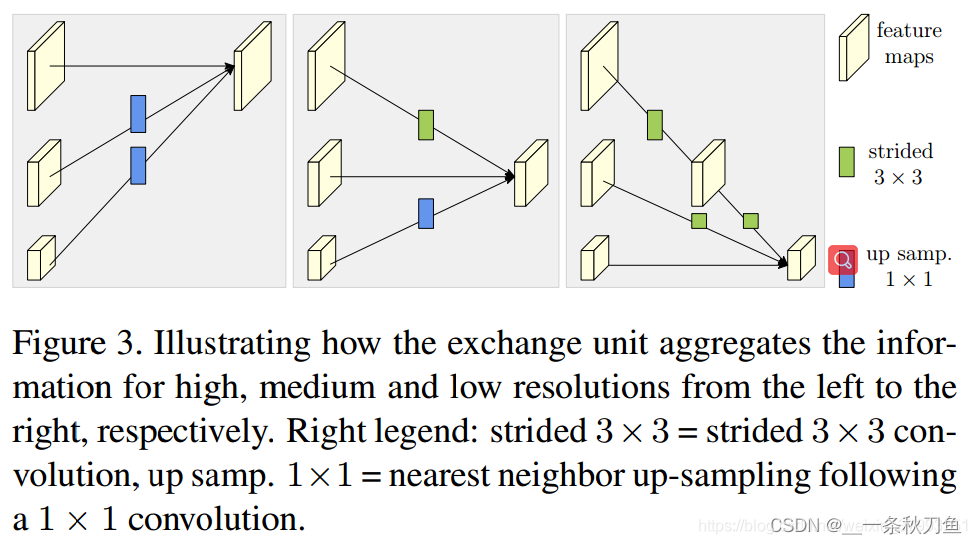
并联、交互准则
- 相同分辨率的层直接复制
- upsampling采用bilinear upsample + 1*1 kernel统一channel数
- downsample使用strides 3*3kernel(没有使用pooling)
- feature map 之间的融合方式是相加
最终分支的选择
- 普适性选择:使用分辨率最高的特征图
- 语义分割和面部关键点检测:将所有分辨率的特征图在进行upsampling到统一维度后进行concate
- 目标检测:在concate基础上使用特征金字塔
- 分类网络:四个分支融合
code
# ------------------------------------------------------------------------------
# Copyright (c) Microsoft
# Licensed under the MIT License.
# Written by RainbowSecret ([email protected])
# ------------------------------------------------------------------------------
import os
import torch
import torch.nn as nn
import torch.nn.functional as F
import numpy as np
from model_summary import get_model_summary
os.environ["CUDA_VISIBLE_DEVICES"]="0"
# you can modify your parameters here. Using HRNET32 as an example.
# using ReLU6 to replace ReLU here.
# --- HRNET_32 --- #
hrnet32 = {
'STAGE1':{
'NUM_MODULES':1, 'NUM_BRANCHES':1, 'NUM_BLOCKS': [4], 'NUM_CHANNELS':[64], 'BLOCK': 'BOTTLENECK', 'FUSE_METHOD': 'SUM'},
'STAGE2':{
'NUM_MODULES':1, 'NUM_BRANCHES':2, 'NUM_BLOCKS': [4,4], 'NUM_CHANNELS':[32, 64], 'BLOCK': 'BASIC', 'FUSE_METHOD': 'SUM'},
'STAGE3':{
'NUM_MODULES':4, 'NUM_BRANCHES':3, 'NUM_BLOCKS': [4,4,4], 'NUM_CHANNELS':[32,64,128], 'BLOCK': 'BASIC', 'FUSE_METHOD': 'SUM'},
'STAGE4':{
'NUM_MODULES':3, 'NUM_BRANCHES':4, 'NUM_BLOCKS': [4,4,4,4], 'NUM_CHANNELS':[32,64,128,256], 'BLOCK': 'BASIC', 'FUSE_METHOD': 'SUM'}}
def conv3x3(in_planes, out_planes, stride=1, groups=1, dilation=1):
"""3x3 convolution with padding"""
return nn.Conv2d(in_planes, out_planes, kernel_size=3, stride=stride,
padding=dilation, groups=groups, bias=False, dilation=dilation)
def conv1x1(in_planes, out_planes, stride=1):
"""1x1 convolution"""
return nn.Conv2d(in_planes, out_planes, kernel_size=1, stride=stride, bias=False)
# -- weight initialization -- #
def initialize_weights(*models):
for model in models:
for m in model.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight.data, nonlinearity='relu')
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1.)
m.bias.data.fill_(1e-4)
elif isinstance(m, nn.Linear):
m.weight.data.normal_(0.0, 0.0001)
m.bias.data.zero_()
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, inplanes, planes, stride=1, downsample=None, groups=1,
base_width=64, dilation=1, norm_layer=None):
super(BasicBlock, self).__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2d
if groups != 1 or base_width != 64:
raise ValueError('BasicBlock only supports groups=1 and base_width=64')
if dilation > 1:
raise NotImplementedError("Dilation > 1 not supported in BasicBlock")
# Both self.conv1 and self.downsample layers downsample the input when stride != 1
self.conv1 = conv3x3(inplanes, planes, stride)
self.bn1 = norm_layer(planes, eps=1e-3)
self.relu = nn.ReLU6(inplace=True)
self.conv2 = conv3x3(planes, planes)
self.bn2 = norm_layer(planes, eps=1e-3)
self.downsample = downsample
self.stride = stride
initialize_weights(self)
def forward(self, x):
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample=None, groups=1,
base_width=64, dilation=1, norm_layer=None):
super(Bottleneck, self).__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2d
width = int(planes * (base_width / 64.)) * groups
# Both self.conv2 and self.downsample layers downsample the input when stride != 1
self.conv1 = conv1x1(inplanes, width)
self.bn1 = norm_layer(width, eps=1e-3)
self.conv2 = conv3x3(width, width, stride, groups, dilation)
self.bn2 = norm_layer(width, eps=1e-3)
self.conv3 = conv1x1(width, planes * self.expansion)
self.bn3 = norm_layer(planes * self.expansion, eps=1e-3)
self.relu = nn.ReLU6(inplace=True)
self.downsample = downsample
self.stride = stride
initialize_weights(self)
def forward(self, x):
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
class HighResolutionModule(nn.Module):
def __init__(self, num_branches, blocks, num_blocks, num_inchannels,
num_channels, fuse_method, multi_scale_output=True, norm_layer=None):
super(HighResolutionModule, self).__init__()
self._check_branches(
num_branches, blocks, num_blocks, num_inchannels, num_channels)
if norm_layer is None:
norm_layer = nn.BatchNorm2d
self.norm_layer = norm_layer
self.num_inchannels = num_inchannels
self.fuse_method = fuse_method
self.num_branches = num_branches
self.multi_scale_output = multi_scale_output
self.branches = self._make_branches(
num_branches, blocks, num_blocks, num_channels)
self.fuse_layers = self._make_fuse_layers()
self.relu = nn.ReLU6(inplace=True)
initialize_weights(self)
def _check_branches(self, num_branches, blocks, num_blocks,
num_inchannels, num_channels):
if num_branches != len(num_blocks):
error_msg = 'NUM_BRANCHES({}) <> NUM_BLOCKS({})'.format(
num_branches, len(num_blocks))
raise ValueError(error_msg)
if num_branches != len(num_channels):
error_msg = 'NUM_BRANCHES({}) <> NUM_CHANNELS({})'.format(
num_branches, len(num_channels))
raise ValueError(error_msg)
if num_branches != len(num_inchannels):
error_msg = 'NUM_BRANCHES({}) <> NUM_INCHANNELS({})'.format(
num_branches, len(num_inchannels))
raise ValueError(error_msg)
def _make_one_branch(self, branch_index, block, num_blocks, num_channels,
stride=1):
downsample = None
if stride != 1 or \
self.num_inchannels[branch_index] != num_channels[branch_index] * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.num_inchannels[branch_index],
num_channels[branch_index] * block.expansion,
kernel_size=1, stride=stride, bias=False),
self.norm_layer(num_channels[branch_index] * block.expansion),
)
layers = []
layers.append(block(self.num_inchannels[branch_index],
num_channels[branch_index], stride, downsample, norm_layer=self.norm_layer))
self.num_inchannels[branch_index] = \
num_channels[branch_index] * block.expansion
for i in range(1, num_blocks[branch_index]):
layers.append(block(self.num_inchannels[branch_index],
num_channels[branch_index], norm_layer=self.norm_layer))
return nn.Sequential(*layers)
def _make_branches(self, num_branches, block, num_blocks, num_channels):
branches = []
for i in range(num_branches):
branches.append(
self._make_one_branch(i, block, num_blocks, num_channels))
return nn.ModuleList(branches)
def _make_fuse_layers(self):
if self.num_branches == 1:
return None
num_branches = self.num_branches
num_inchannels = self.num_inchannels
fuse_layers = []
for i in range(num_branches if self.multi_scale_output else 1):
fuse_layer = []
for j in range(num_branches):
if j > i:
fuse_layer.append(nn.Sequential(
nn.Conv2d(num_inchannels[j],
num_inchannels[i],
1,
1,
0,
bias=False),
self.norm_layer(num_inchannels[i], eps=1e-3)))
elif j == i:
fuse_layer.append(None)
else:
conv3x3s = []
for k in range(i-j):
if k == i - j - 1:
num_outchannels_conv3x3 = num_inchannels[i]
conv3x3s.append(nn.Sequential(
nn.Conv2d(num_inchannels[j],
num_outchannels_conv3x3,
3, 2, 1, bias=False),
self.norm_layer(num_outchannels_conv3x3, eps=1e-3)))
else:
num_outchannels_conv3x3 = num_inchannels[j]
conv3x3s.append(nn.Sequential(
nn.Conv2d(num_inchannels[j],
num_outchannels_conv3x3,
3, 2, 1, bias=False),
self.norm_layer(num_outchannels_conv3x3, eps=1e-3),
nn.ReLU6(inplace=True)))
fuse_layer.append(nn.Sequential(*conv3x3s))
fuse_layers.append(nn.ModuleList(fuse_layer))
return nn.ModuleList(fuse_layers)
def get_num_inchannels(self):
return self.num_inchannels
def forward(self, x):
if self.num_branches == 1:
return [self.branches[0](x[0])]
for i in range(self.num_branches):
x[i] = self.branches[i](x[i])
x_fuse = []
for i in range(len(self.fuse_layers)):
y = x[0] if i == 0 else self.fuse_layers[i][0](x[0])
for j in range(1, self.num_branches):
if i == j:
y = y + x[j]
elif j > i:
width_output = x[i].shape[-1]
height_output = x[i].shape[-2]
y = y + F.interpolate(
self.fuse_layers[i][j](x[j]),
size=[height_output, width_output],
mode='bilinear',
align_corners=True
)
else:
y = y + self.fuse_layers[i][j](x[j])
x_fuse.append(self.relu(y))
return x_fuse
blocks_dict = {
'BASIC': BasicBlock,
'BOTTLENECK': Bottleneck
}
class HighResolutionNet(nn.Module):
def __init__(self,
original_figure_channel,
options,
cfg=None,
norm_layer=None):
super(HighResolutionNet, self).__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2d
if cfg is None:
cfg = hrnet32
self.norm_layer = norm_layer
self.original_figure_channel = original_figure_channel
# stem network
# stem net
self.conv1 = nn.Conv2d(self.original_figure_channel, 64, kernel_size=3, stride=2, padding=1,
bias=False)
self.bn1 = self.norm_layer(64)
self.conv2 = nn.Conv2d(64, 64, kernel_size=3, stride=2, padding=1,
bias=False)
self.bn2 = self.norm_layer(64)
self.relu = nn.ReLU6(inplace=True)
# stage 1
self.stage1_cfg = cfg['STAGE1']
num_channels = self.stage1_cfg['NUM_CHANNELS'][0]
block = blocks_dict[self.stage1_cfg['BLOCK']]
num_blocks = self.stage1_cfg['NUM_BLOCKS'][0]
self.layer1 = self._make_layer(block, 64, num_channels, num_blocks)
stage1_out_channel = block.expansion*num_channels
# stage 2
self.stage2_cfg = cfg['STAGE2']
num_channels = self.stage2_cfg['NUM_CHANNELS']
block = blocks_dict[self.stage2_cfg['BLOCK']]
num_channels = [
num_channels[i] * block.expansion for i in range(len(num_channels))]
self.transition1 = self._make_transition_layer(
[stage1_out_channel], num_channels)
self.stage2, pre_stage_channels = self._make_stage(
self.stage2_cfg, num_channels)
# stage 3
self.stage3_cfg = cfg['STAGE3']
num_channels = self.stage3_cfg['NUM_CHANNELS']
block = blocks_dict[self.stage3_cfg['BLOCK']]
num_channels = [
num_channels[i] * block.expansion for i in range(len(num_channels))]
self.transition2 = self._make_transition_layer(
pre_stage_channels, num_channels)
self.stage3, pre_stage_channels = self._make_stage(
self.stage3_cfg, num_channels)
# stage 4
self.stage4_cfg = cfg['STAGE4']
num_channels = self.stage4_cfg['NUM_CHANNELS']
block = blocks_dict[self.stage4_cfg['BLOCK']]
num_channels = [
num_channels[i] * block.expansion for i in range(len(num_channels))]
self.transition3 = self._make_transition_layer(
pre_stage_channels, num_channels)
self.stage4, pre_stage_channels = self._make_stage(
self.stage4_cfg, num_channels, multi_scale_output=True)
last_inp_channels = np.int(np.sum(pre_stage_channels))
self.last_layer = nn.Sequential(
nn.Conv2d(
in_channels=last_inp_channels,
out_channels=last_inp_channels,
kernel_size=1,
stride=1,
padding=0),
self.norm_layer(last_inp_channels, eps=1e-3),
nn.ReLU6(inplace=True),
nn.Conv2d(
in_channels=last_inp_channels,
# --- Modified according to FeatureMap input --- #
out_channels=128,
kernel_size=1,
stride=1,
padding=0),
# --- Add batch norm solvee test loss nan --- #
self.norm_layer(128, eps=1e-3)
)
def _make_transition_layer(
self, num_channels_pre_layer, num_channels_cur_layer):
num_branches_cur = len(num_channels_cur_layer)
num_branches_pre = len(num_channels_pre_layer)
transition_layers = []
for i in range(num_branches_cur):
if i < num_branches_pre:
if num_channels_cur_layer[i] != num_channels_pre_layer[i]:
transition_layers.append(nn.Sequential(
nn.Conv2d(num_channels_pre_layer[i],
num_channels_cur_layer[i],
3,
1,
1,
bias=False),
self.norm_layer(num_channels_cur_layer[i], eps=1e-3),
nn.ReLU6(inplace=True)))
else:
transition_layers.append(None)
else:
conv3x3s = []
for j in range(i+1-num_branches_pre):
inchannels = num_channels_pre_layer[-1]
outchannels = num_channels_cur_layer[i] \
if j == i-num_branches_pre else inchannels
conv3x3s.append(nn.Sequential(
nn.Conv2d(
inchannels, outchannels, 3, 2, 1, bias=False),
self.norm_layer(outchannels, eps=1e-3),
nn.ReLU6(inplace=True)))
transition_layers.append(nn.Sequential(*conv3x3s))
return nn.ModuleList(transition_layers)
def _make_layer(self, block, inplanes, planes, blocks, stride=1):
downsample = None
if stride != 1 or inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(inplanes, planes * block.expansion,
kernel_size=1, stride=stride, bias=False),
self.norm_layer(planes * block.expansion, eps=1e-3),
)
layers = []
layers.append(block(inplanes, planes, stride, downsample, norm_layer=self.norm_layer))
inplanes = planes * block.expansion
for i in range(1, blocks):
layers.append(block(inplanes, planes, norm_layer=self.norm_layer))
return nn.Sequential(*layers)
def _make_stage(self, layer_config, num_inchannels,
multi_scale_output=True):
num_modules = layer_config['NUM_MODULES']
num_branches = layer_config['NUM_BRANCHES']
num_blocks = layer_config['NUM_BLOCKS']
num_channels = layer_config['NUM_CHANNELS']
block = blocks_dict[layer_config['BLOCK']]
fuse_method = layer_config['FUSE_METHOD']
modules = []
for i in range(num_modules):
# multi_scale_output is only used last module
if not multi_scale_output and i == num_modules - 1:
reset_multi_scale_output = False
else:
reset_multi_scale_output = True
modules.append(
HighResolutionModule(num_branches,
block,
num_blocks,
num_inchannels,
num_channels,
fuse_method,
reset_multi_scale_output,
norm_layer=self.norm_layer)
)
num_inchannels = modules[-1].get_num_inchannels()
return nn.Sequential(*modules), num_inchannels
def forward(self, x_):
x = self.conv1(x_)
x = self.bn1(x)
x = self.relu(x)
x = self.conv2(x)
x = self.bn2(x)
x = self.relu(x)
x = self.layer1(x)
x_list = []
for i in range(self.stage2_cfg['NUM_BRANCHES']):
if self.transition1[i] is not None:
x_list.append(self.transition1[i](x))
else:
x_list.append(x)
y_list = self.stage2(x_list)
x_list = []
for i in range(self.stage3_cfg['NUM_BRANCHES']):
if self.transition2[i] is not None:
if i < self.stage2_cfg['NUM_BRANCHES']:
x_list.append(self.transition2[i](y_list[i]))
else:
x_list.append(self.transition2[i](y_list[-1]))
else:
x_list.append(y_list[i])
y_list = self.stage3(x_list)
x_list = []
for i in range(self.stage4_cfg['NUM_BRANCHES']):
if self.transition3[i] is not None:
if i < self.stage3_cfg['NUM_BRANCHES']:
x_list.append(self.transition3[i](y_list[i]))
else:
x_list.append(self.transition3[i](y_list[-1]))
else:
x_list.append(y_list[i])
x = self.stage4(x_list)
# Upsampling
#print(x[0].size(), x[1].size(), x[2].size(), x[3].size())
# --- upsampling to original size --- *
x0_h, x0_w = x[0].size(2), x[0].size(3)
#x0_h, x0_w = x_.size(2), x_.size(3)
#x0 = F.interpolate(x[0], size=(x0_h, x0_w), mode='bilinear', align_corners=True)
x1 = F.interpolate(x[1], size=(x0_h, x0_w), mode='bilinear', align_corners=True)
x2 = F.interpolate(x[2], size=(x0_h, x0_w), mode='bilinear', align_corners=True)
x3 = F.interpolate(x[3], size=(x0_h, x0_w), mode='bilinear', align_corners=True)
#x = torch.cat([x[0], x1, x2, x3], 1)
x = torch.cat([x[0], x1, x2, x3], 1)
x = self.last_layer(x)
return x
if __name__ == '__main__':
device = torch.device("cuda" if torch.cuda.is_available() else 'cpu')
img = torch.randn(1, 27, 256, 256)
img = img.to(device)
model = HighResolutionNet(cfg=hrnet32, original_figure_channel=img.size()[1], options = None)
model = model.to(device)
details = get_model_summary(model, img)
output = model(img)
print(output.shape)
print(details)
# OUTPUT:
torch.Size([1, 128, 64, 64])
Total Parameters: 29,613,024
----------------------------------------------------------------------------------------------------------------------------------
Total Multiply Adds (For Convolution and Linear Layers only): 10.923583984375 GFLOPs
----------------------------------------------------------------------------------------------------------------------------------
Number of Layers
Conv2d : 307 layers BatchNorm2d : 307 layers ReLU6 : 269 layers Bottleneck : 4 layers BasicBlock : 104 layers HighResolutionModule : 8 layers